RANSAC---从直线拟合到特征匹配去噪
Ransac全称为Random Sample Consensus,随机一致性采样。该方法是一种十分高效的数据拟合方法。我们通过最简单的拟合直线任务来了解这种方法思路,继而扩展到特征点匹配中的误点剔除问题。
(注意,RANSAC不是直接用于特征点匹配,而是一种在初步特征匹配后消除误匹配的方法)
直线拟合过程
在平面直线拟合任务中,我们的目标是找到一条直线方程,使得数据集中大部分点都在这条直线方程附近;另一种理解,就是找到一个x,y之间的映射关系(模型),使得该映射关系能够尽量反映数据集中大部分点的x,y之间的关系。
首先,由于两个点能够确定一条直线,我们在数据集中随机选取两个点,通过这两个点确定一条直线方程。
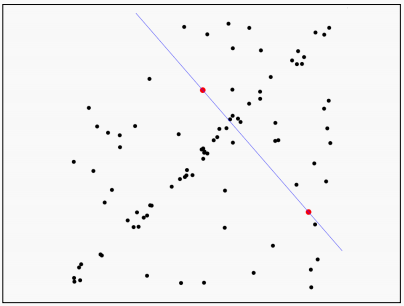
接下来,让数据集内的所有点对刚才选择的直线方程进行评估,看这条方程选的怎么样。我们计算所有点到直线的距离。
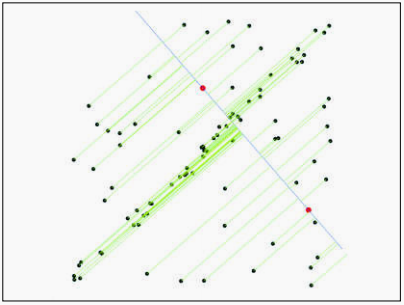
设置一个阈值范围来定义直线的”附近“,在这个范围内的点作为内点,范围外的点作为外点。计算内点数量。
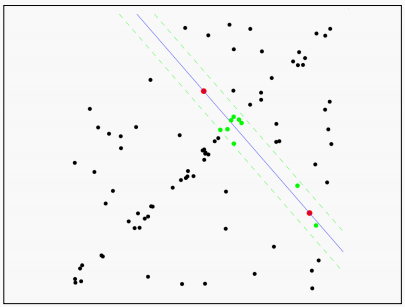
接下来重复上面的步骤,再次随机选取两个点,求解方程,所有点计算距离,得到内点数量。
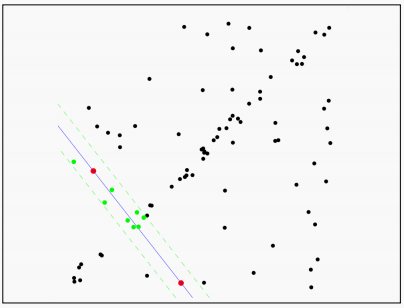
重复这一过程直到内点数量满足要求,或者达到迭代次数,此时得到的直线方程就是我们需要的直线方程。
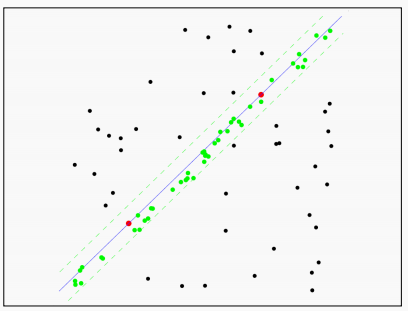
最后,为了更加精确的找到这个映射关系,我们还是需要对所有的内点进行一次最小二乘拟合。得到最终结果。
整体流程如下:
重复 N 次:
- 均匀随机抽取 2 个点
- 对这 2 个点进行直线拟合
- 在剩余的点中找出该直线的内点(即与直线距离小于 t 的点)
- 如果内点数量达到 d 个或更多,则接受该直线,并使用所有内点重新拟合
对直线拟合的RANSAC方法的思考
这个方法几乎是完全随机的、暴力的去求解这个问题。这种方法可行吗?
在计算机学科里,这种方法还真是可行。它不仅简单,还能适用于多种不同的问题。
在直线拟合任务中,数据集中每一个点(x, y),我们称其为一个sample,通过许多这样的sample,我们期望找到一个映射关系(model),能够最好的描述x, y之间的关系,使得更多的sample落在该模型的附近。事实上,任何类似这种给定samples(每个sample都是一组离散的映射),求解最优的整体映射模型的问题,都可以用RANSAC方法进行处理。
RANSAC的通用步骤
- 随机选择一个最小subset sample集,用于描述模型
- 拟合这个模型
- 让其他的点对这个模型进行投票,选出距离这个模型近的点作为内点,其他作为外点
- 重复这一过程,直到得到最优的模型
RANSAC的大体思想就是这样,我们下面讨论一些细节问题,如何选择参数?
参数选择
初始点的数量 s
通常为拟合模型所需的最少点数,比如直线拟合,确定一条直线的最小点集是2个,s就为2。
距离阈值 t
哪些点是内点,这是一个任务导向的问题。需要根据任务的数据集具体情况而定。选择 t,使内点出现的概率为 p(例如 0.95)
如果数据中的噪声分布符合均值为 0、标准差为 σ 的高斯噪声,则 t² = 3.84σ²
采样次数 N
可能我们迭代几次就找到了最优解,后续的迭代都是浪费资源;也有可能我们迭代了很多次,也找不到最优解,而这个很多次到底选多少?几百?几千?几万?这个迭代次数N如何确定。
这时我们只有采用概率的方式来确定迭代次数,也就是迭代N次,最有可能得到最优解。
设迭代N次后,至少有一次我们选择的随机样本是最优解(不含外点的模型),这个概率为p。也就是说N次迭代后我们完美找到最优解的概率为p,我们当然希望这个p值较高,我们定一个p=0.99。
那么N次迭代后我们一次都没有选择到最优解(不含外点模型)的概率是多少?显然这个说法和上面的是逻辑互斥的,这个概率为1 - p
从另一个角度来说,我们假定真实的外点率为e,在一次迭代内我们选择了s个点,这s个点我们都选择了真实内点的概率,应该是\((1-e)^s\)
相反的,这s个点我们至少选了一个外点的概率,就是\(1-(1-e)^s\),也就是本次迭代没有得到最优解的概率。如果N次迭代每次都没有得到最优解呢,这个概率就是\((1-(1-e)^s)^N\)
上面两个粗体的描述是一致的,我们从两个角度得到了迭代N次都没有得到最优解的概率,从而将e、s、N、p这几个变量建立了关系:
\]
两边同时log一下,我们就得到了N的表达式
\]
在实践中,我们选择 N时,可以通过确定p = 0.99,估计一下数据集中的外点率e,通过模型类型确定s,来计算N的大小。如图中表格所示,如果外点率为40%,s为2,那么要达到0.99的最优解获得概率,迭代次数就应为7:
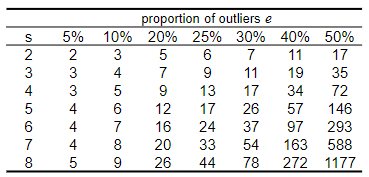
当然这是通过概率来算出来的迭代次数,只是给一个参考,实践中我们还是应当适当选取一个更大的值。
此外,内点比例 e 通常是先验未知的,所以选取最不利的情况,例如 50% 。如果发现了更多内点,则进行调整,例如若实际内点比例为 80%,那么异常值比例e=0.2 。
一致集大小 d
这个也是和数据集相关,应与预期的内点比例 1 - e 相匹配
自适应迭代次数
在RANSAC的应用中,我们通常采用一种自适应的过程去控制迭代次数。过程如下:
初始N设为无穷大,sample_count(采样计数)设为 0
当 N>sample_count 时:
- 选择一个样本并统计内点的数量
- 计算 e=1−(内点数量)/(点的总数)
- 根据e重新计算N:
\]
- sample_count 自增 1
这样尽管最初的迭代次数N为无穷大,但我们在循环中,通过每次迭代算出来的外点率e可以得到新的N值,N值会不断减小。如果N值小于当前sample_count了,表示理论上迭代N次就够了,但我现在已经迭代了sample_count次(>N),所以迭代就可以停止了。
RANSAC在特征匹配问题中的应用
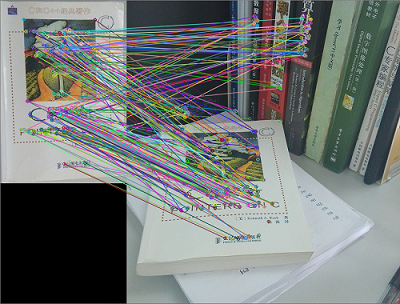
在图像特征进行匹配之后,往往得到的许多匹配点都是误点,如图:
这些误点会影响后续的图像拼接、识别等操作,需要将它们去除掉。得到如下图:
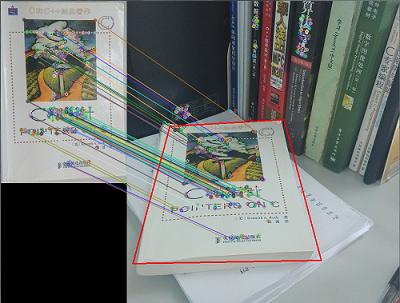
这个过程就可以采用RANSAC的方法。
在特征点的匹配中,每一对匹配的特征,就是一个离散的映射关系,也就是一个sample。(类比于直线拟合中的(x,y))。
存在一个最优的变换模型,对两个图像中的匹配点进行映射(类比于直线拟合中的直线方程)。
在图像的特征点变换时,我们用单应性矩阵描述两个平面之间的透视关系,它把一个平面上的点通过齐次坐标映射到另一个平面上。其公式为:
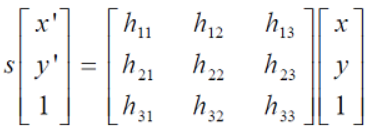
通常令h33=1来归一化矩阵。由于单应性矩阵有8个未知参数,至少需要8个线性方程求解,对应到点位置信息上,一组点对可以列出两个方程,则至少包含4组匹配点对。
适配这个最优转换模型的samples,就是内点。不适配这个模型的samples,就是外点。(注意这里的内点和外点不是图像上的特征点,而是由一对匹配好的特征点组成的sample)
随机抽样一致性算法(RANSAC)的优缺点
- 优点
- 简单且通用
- 适用于许多不同的问题
- 在实际应用中通常效果良好
- 缺点
- 有很多参数需要调整
- 对于低内点比例的情况效果不佳(迭代次数过多,甚至可能完全失败)
- 基于最少样本数量,并不总能获得模型的良好初始值
RANSAC---从直线拟合到特征匹配去噪的更多相关文章
- OpenCV2马拉松第25圈——直线拟合与RANSAC算法
计算机视觉讨论群162501053 转载请注明:http://blog.csdn.net/abcd1992719g/article/details/28118095 收入囊中 最小二乘法(least ...
- 利用SIFT进行特征匹配
SIFT算法是一种基于尺度空间的算法.利用SIFT提取出的特征点对旋转.尺度变化.亮度变化具有不变性,对视角变化.仿射变换.噪声也有一定的稳定性. SIFT实现特征的匹配主要包括四个步骤: 提取特征点 ...
- OpenCV2:特征匹配及其优化
在OpenCV2简单的特征匹配中对使用OpenCV2进行特征匹配的步骤做了一个简单的介绍,其匹配出的结果是非常粗糙的,在这篇文章中对使用OpenCV2进行匹配的细化做一个简单的总结.主要包括以下几个内 ...
- 特征提取(Detect)、特征描述(Descriptor)、特征匹配(Match)的通俗解释
特征匹配(Feature Match)是计算机视觉中很多应用的基础,比如说图像配准,摄像机跟踪,三维重建,物体识别,人脸识别,所以花一些时间去深入理解这个概念是不为过的.本文希望通过一种通俗易懂的方式 ...
- 2d-Lidar 点云多直线拟合算法
具体步骤: EM+GMM(高斯模糊模型) 点云分割聚类算法的实现. 基于RANSAC单帧lidar数据直线拟合算法实现. 多帧lidar数据实时直线优化算法实现. 算法实现逻辑: Struct lin ...
- OpenCV-Python 特征匹配 + 单应性查找对象 | 四十五
目标 在本章节中,我们将把calib3d模块中的特征匹配和findHomography混合在一起,以在复杂图像中找到已知对象. 基础 那么我们在上一环节上做了什么?我们使用了queryImage,找到 ...
- OpenCV 之 特征匹配
OpenCV 中有两种特征匹配方法:暴力匹配 (Brute force matching) 和 最近邻匹配 (Nearest Neighbors matching) 它们都继承自 Descriptor ...
- [OpenCV]基于特征匹配的实时平面目标检测算法
一直想基于传统图像匹配方式做一个融合Demo,也算是对上个阶段学习的一个总结. 由此,便采购了一个摄像头,在此基础上做了实时检测平面目标的特征匹配算法. 代码如下: # coding: utf-8 ' ...
- OpenCV2简单的特征匹配
特征的匹配大致可以分为3个步骤: 特征的提取 计算特征向量 特征匹配 对于3个步骤,在OpenCV2中都进行了封装.所有的特征提取方法都实现FeatureDetector接口,DescriptorEx ...
- (原)opencv直线拟合fitLine
转载请注明出处 http://www.cnblogs.com/darkknightzh/p/5486234.html 参考网址: http://blog.csdn.net/thefutureisour ...
随机推荐
- Slate文档编辑器-Decorator装饰器渲染调度
Slate文档编辑器-Decorator装饰器渲染调度 在之前我们聊到了基于文档编辑器的数据结构设计,聊了聊基于slate实现的文档编辑器类型系统,那么当前我们来研究一下slate编辑器中的装饰器实现 ...
- IM消息ID技术专题(七):深度解密vivo的自研分布式ID服务(鲁班)
本文由vivo互联网技术An Peng分享,本文收录时有内容修订和重新排版. 1.引言 本文通过对分布式ID的3种应用场景.实现难点以及9种分布式ID的实现方式进行介绍,并对结合vivo业务场景特性下 ...
- python-nmap实现python利用nmap扫描分析
目录 前言 python-nmap的基本使用 PortScanner扫描 PortScannerAsync异步扫描 python-nmap的源码分析 前言 Nmap是一个非常用的网络/端口扫描工具,如 ...
- 展锐SE8451E 开启硬件流控
Dear Customer: 如电话沟通,若将uart0配置成3M波特率,需进行如下更改: 1.时钟源更改为96M/sprdroid10_trunk_19c_rls1/bsp/kernel/ker ...
- Protocol Buffer 使用-copy
概述Protocol Buffers 是一种轻便高效的结构化数据存储格式,可以用于结构化数据串行化,或者说序列化.它很适合做数据存储或 RPC 数据交换格式.可用于通讯协议.数据存储等领域的语言无关. ...
- 最全Zookeeper面试题总结
1. ZooKeeper 是什么? ZooKeeper 是一个开源的分布式协调服务.它是一个为分布式应用提供一致性服务的软件,分布式应用程序可以基于 Zookeeper 实现诸如数据发布/订阅.负载均 ...
- Tomcat 连接池介绍
Tomcat 连接池是从 Tomcat 7 开始重新编写的高并发连接池,用以取代以前 Tomcat 中使用的 DBCP 1 连接池,它可以配置在 Tomcat 中使用,也可以单独使用.本文主要介绍 T ...
- 《SpringBoot》自动装配原理(简单易懂)
引入 先看SpringBoot的主配置类 @SpringBootApplication public class DemoApplication{ public static void main(St ...
- rpc项目中的长连接与短连接的思考
对于rpc项目,在接受大佬指导的时候曾问过对于长连接和短连接是处理处理的,在面试的时候也被问起socket是长连接还是短连接,发现自己没有好好思考过这个问题,因此好好总结一下. 前置知识点:rpc基础 ...
- MySql中创建用户以及设置其操作权限
以下设置针对MySql8+版本进行测试,低版本暂无测试. 以管理员身份CMD并定位到MySql安装的bin目录,然后执行命令mysql -u root -p登录到MySql,然后输入登录密码,登录成功 ...