OpenCV开发笔记(八十二):两图拼接使用渐进色蒙版场景过渡缝隙
前言
对于图像拼接,前面探讨了通过基于Stitcher进行拼接过渡和基于特征点进行拼接过渡,这2个过渡的方式是摄像头拍摄角度和方向不应差距太大。
对于特定的场景,本身摄像头拍摄角度差距较大,拉伸变换后也难做到完美的缝隙拼接,这个时候使用渐近过渡反倒是最好的。
Demo
单独蒙版



蒙版过渡,这里只是根据图来,其实可对每个像素对于第一张图为系数k,而第二张为255-k,实现渐近过渡。
直接使用第一张蒙版优化
准本蒙版
蒙版可以混合,也可以分开,为了让读者更好的深入理解原理,这里都使用:
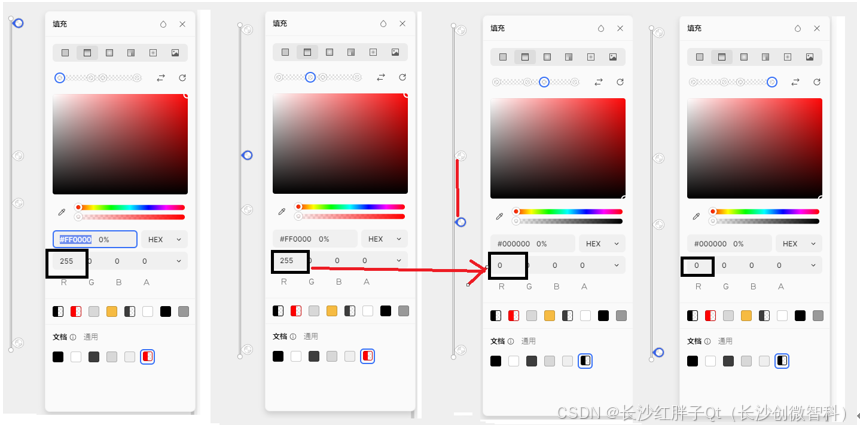
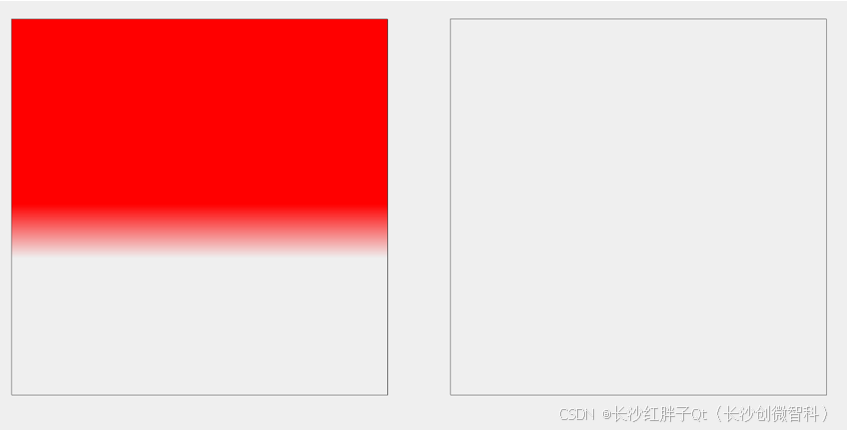
找个工具,造单色渐进色,红色蒙版,只是r通道,bga都为0

(注意:使用rgba四通道)
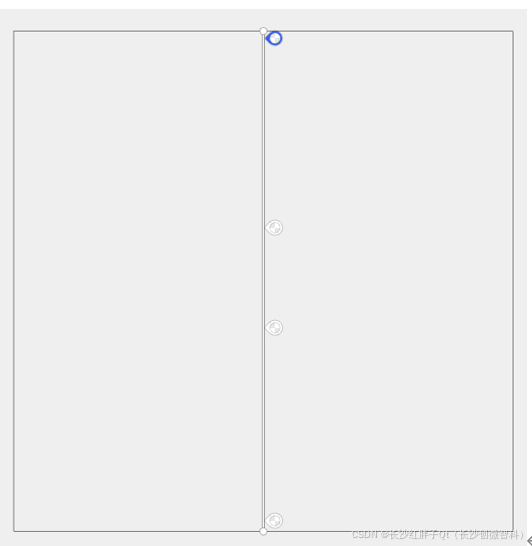
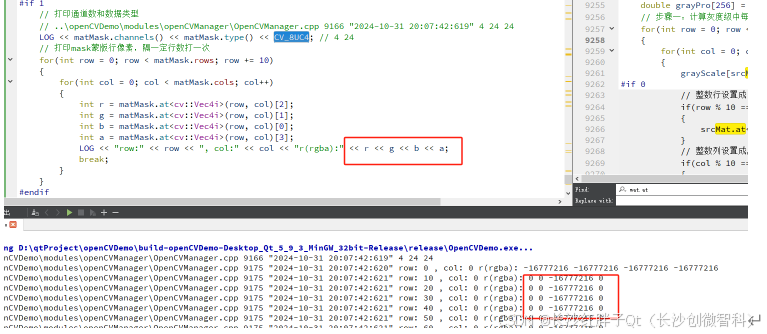
(上面这张图,加了边框,导致了“入坑二”打印像素值不对)
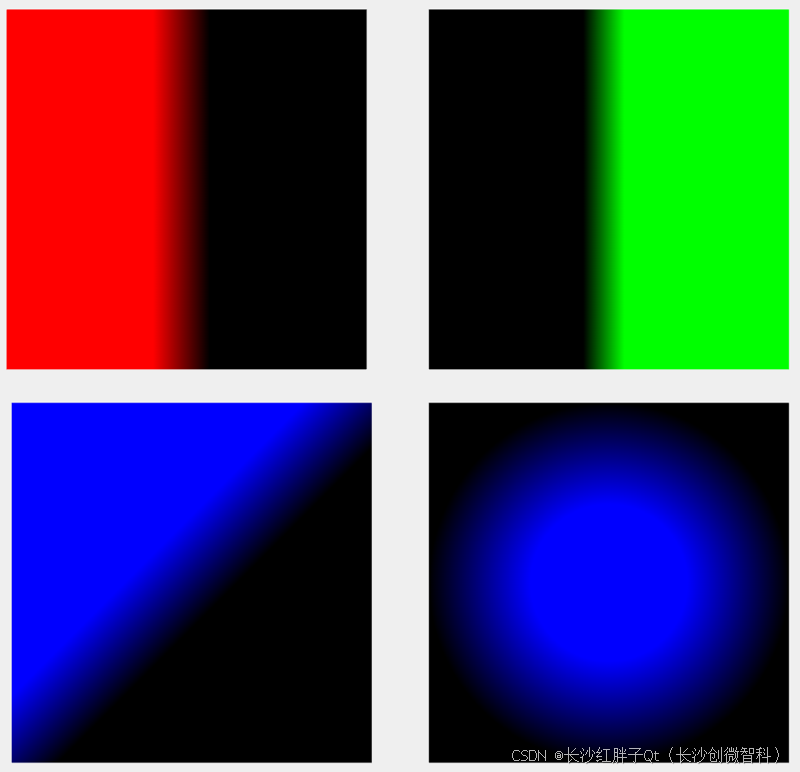
由于工具渐进色无法叠层,这个工具无法实现rgba不同向渐进色再一张图(横向、纵向、斜向),更改了方式,每个使用一张图:
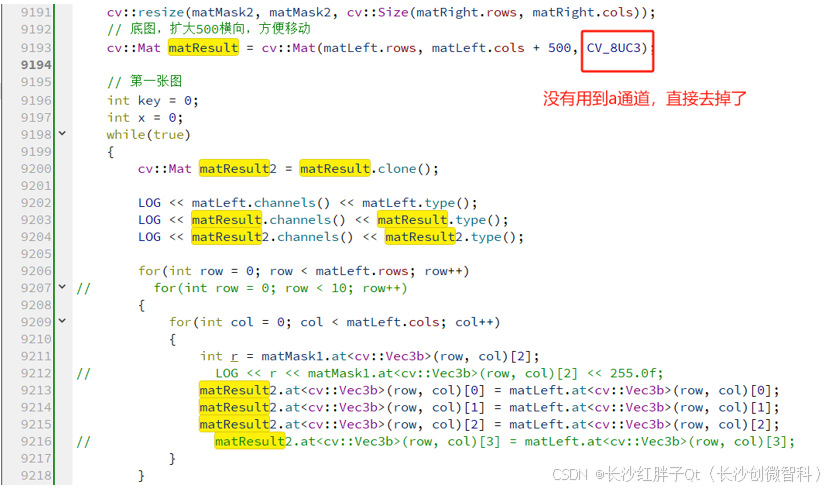
为了方便,不管a通道了,直接a为100%(255)。
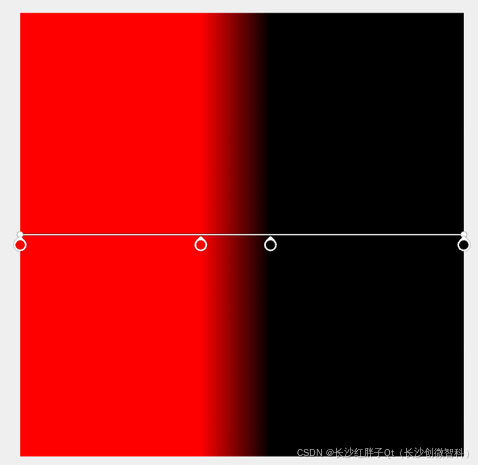
再弄另外一个通道的:

在这里使用工具就只能单独一张了:
一个蒙版图的过渡实例
步骤一:打开图片和蒙版

cv::Mat matLeft = cv::imread("D:/qtProject/openCVDemo/openCVDemo/modules/openCVManager/images/29.jpg");
cv::Mat matRight = cv::imread("D:/qtProject/openCVDemo/openCVDemo/modules/openCVManager/images/30.jpg");
cv::Mat matMask1 = cv::imread("D:/qtProject/openCVDemo/openCVDemo/modules/openCVManager/images/37.png", cv::IMREAD_UNCHANGED);
cv::Mat matMask2 = cv::imread("D:/qtProject/openCVDemo/openCVDemo/modules/openCVManager/images/38.png", cv::IMREAD_UNCHANGED);
cv::Mat matMask3 = cv::imread("D:/qtProject/openCVDemo/openCVDemo/modules/openCVManager/images/39.png", cv::IMREAD_UNCHANGED);
cv::Mat matMask4 = cv::imread("D:/qtProject/openCVDemo/openCVDemo/modules/openCVManager/images/40.png", cv::IMREAD_UNCHANGED);
步骤二:将蒙版变成和原图一样大小
cv::resize(matLeft, matLeft, cv::Size(0, 0), 0.5, 0.5);
cv::resize(matRight, matRight, cv::Size(0, 0), 0.5, 0.5);
cv::resize(matMask1, matMask1, cv::Size(matLeft.cols, matLeft.rows));
cv::resize(matMask2, matMask2, cv::Size(matLeft.cols, matLeft.rows));
cv::resize(matMask3, matMask3, cv::Size(matLeft.cols, matLeft.rows));
cv::resize(matMask4, matMask4, cv::Size(matLeft.cols, matLeft.rows));
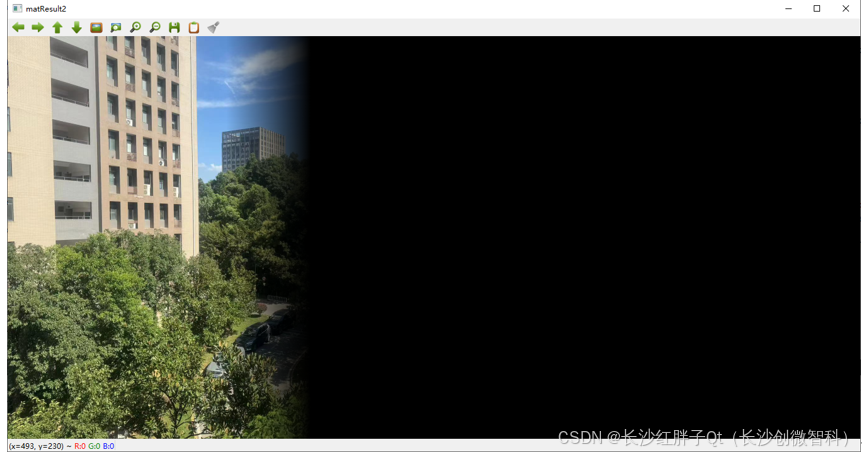
步骤三:底图
由于两张图虽然是同样大小,但是其不是按照整体拼接后的大小,所以需要假设一个拼接后的大小的底图。

// 底图,扩大500横向,方便移动
cv::Mat matResult = cv::Mat(matLeft.rows, matLeft.cols + 500, CV_8UC3);
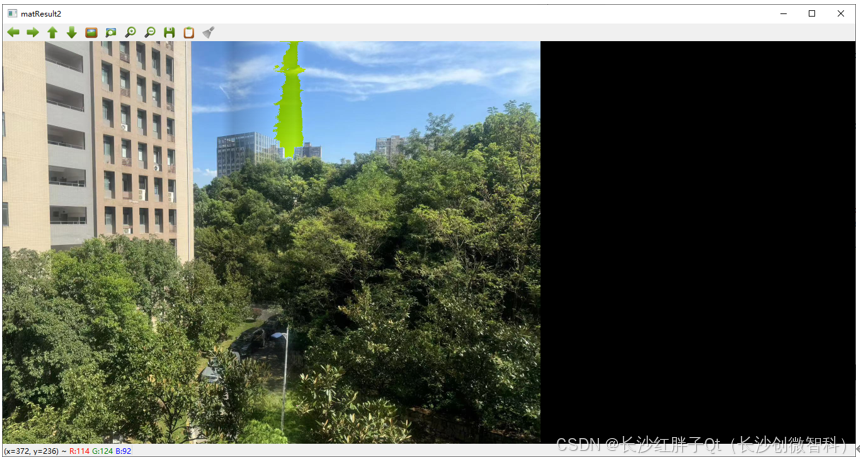
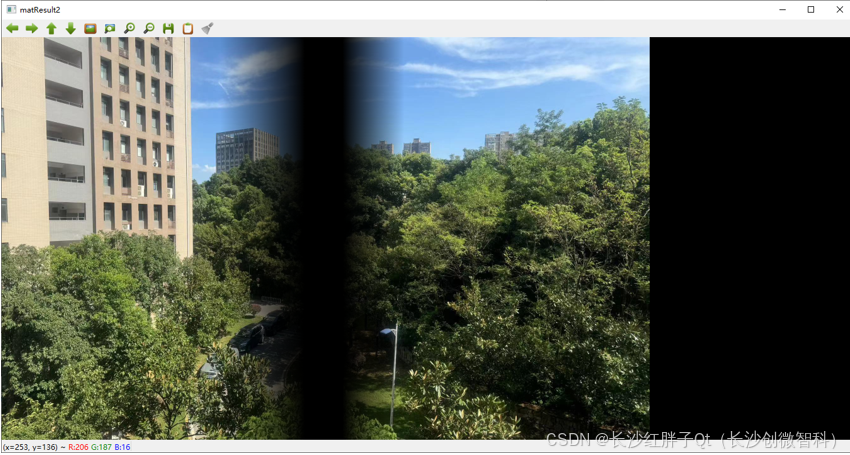
步骤四:原图融合
// 副本,每次都要重新清空来调整
cv::Mat matResult2 = matResult.clone();
#if 1
// 第一张图,直接比例赋值,因为底图为0
for(int row = 0; row < matLeft.rows; row++)
{
for(int col = 0; col < matLeft.cols; col++)
{
double r = matMask1.at<cv::Vec4b>(row, col)[2] / 255.0f;
// double r = matMask2.at<cv::Vec4b>(row, col)[1] / 255.0f;
// double r = matMask3.at<cv::Vec4b>(row, col)[0] / 255.0f;
// double r = matMask4.at<cv::Vec4b>(row, col)[0] / 255.0f;
matResult2.at<cv::Vec3b>(row, col)[0] = (matLeft.at<cv::Vec3b>(row, col)[0] * r);
matResult2.at<cv::Vec3b>(row, col)[1] = (matLeft.at<cv::Vec3b>(row, col)[1] * r);
matResult2.at<cv::Vec3b>(row, col)[2] = (uchar)(matLeft.at<cv::Vec3b>(row, col)[2] * r);
}
}
#endif
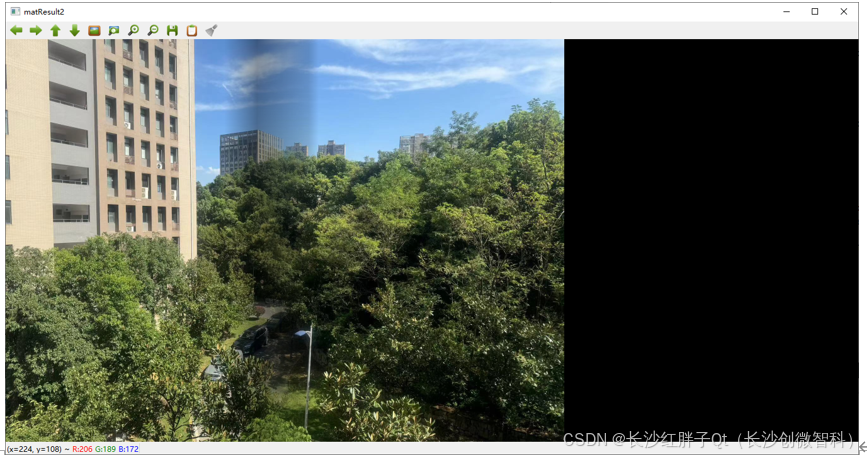
步骤五:另外一张图的融合
#if 1
// 第二张图,加法,因为底图为原图了
for(int row = 0; row < matRight.rows; row++)
{
for(int col = 0; col < matRight.cols; col++)
{
double g = matMask2.at<cv::Vec4b>(row, col)[1] / 255.0f;
// 偏移了x坐标
matResult2.at<cv::Vec3b>(row, col + x)[0] += matRight.at<cv::Vec3b>(row, col)[0] * g;
matResult2.at<cv::Vec3b>(row, col + x)[1] += matRight.at<cv::Vec3b>(row, col)[1] * g;
matResult2.at<cv::Vec3b>(row, col + x)[2] += matRight.at<cv::Vec3b>(row, col)[2] * g;
}
}
#endif
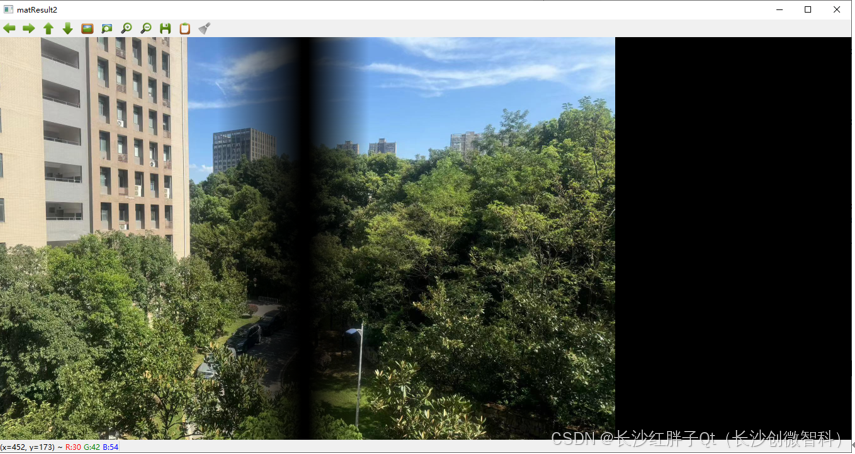
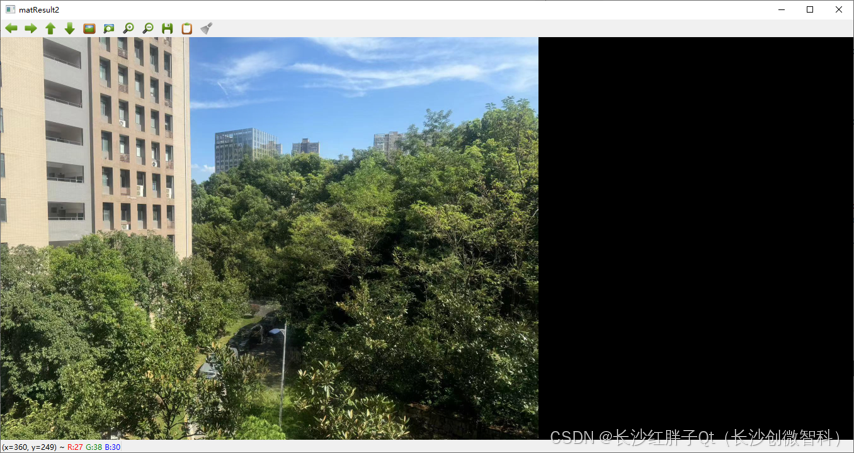
步骤六(与步骤五互斥):优化的融合
#if 1
// 第二张图,加法,因为底图为原图了(优化)
for(int row = 0; row < matRight.rows; row++)
{
for(int col = 0; col < matRight.cols; col++)
{
double r2;
if(x + col <= matLeft.cols)
{
r2 = (255 - matMask1.at<cv::Vec4b>(row, col + x)[2]) / 255.0f;
}else{
r2 = 1.0f;
}
// 偏移了x坐标
matResult2.at<cv::Vec3b>(row, col + x)[0] += matRight.at<cv::Vec3b>(row, col)[0] * r2;
matResult2.at<cv::Vec3b>(row, col + x)[1] += matRight.at<cv::Vec3b>(row, col)[1] * r2;
matResult2.at<cv::Vec3b>(row, col + x)[2] += matRight.at<cv::Vec3b>(row, col)[2] * r2;
}
}
#endif
函数原型
手码的像素算法,没有什么高级函数。
Demo源码
void OpenCVManager::testMaskSplicing()
{
cv::Mat matLeft = cv::imread("D:/qtProject/openCVDemo/openCVDemo/modules/openCVManager/images/29.jpg");
cv::Mat matRight = cv::imread("D:/qtProject/openCVDemo/openCVDemo/modules/openCVManager/images/30.jpg");
cv::Mat matMask1 = cv::imread("D:/qtProject/openCVDemo/openCVDemo/modules/openCVManager/images/37.png", cv::IMREAD_UNCHANGED);
cv::Mat matMask2 = cv::imread("D:/qtProject/openCVDemo/openCVDemo/modules/openCVManager/images/38.png", cv::IMREAD_UNCHANGED);
cv::Mat matMask3 = cv::imread("D:/qtProject/openCVDemo/openCVDemo/modules/openCVManager/images/39.png", cv::IMREAD_UNCHANGED);
cv::Mat matMask4 = cv::imread("D:/qtProject/openCVDemo/openCVDemo/modules/openCVManager/images/40.png", cv::IMREAD_UNCHANGED);
#if 0
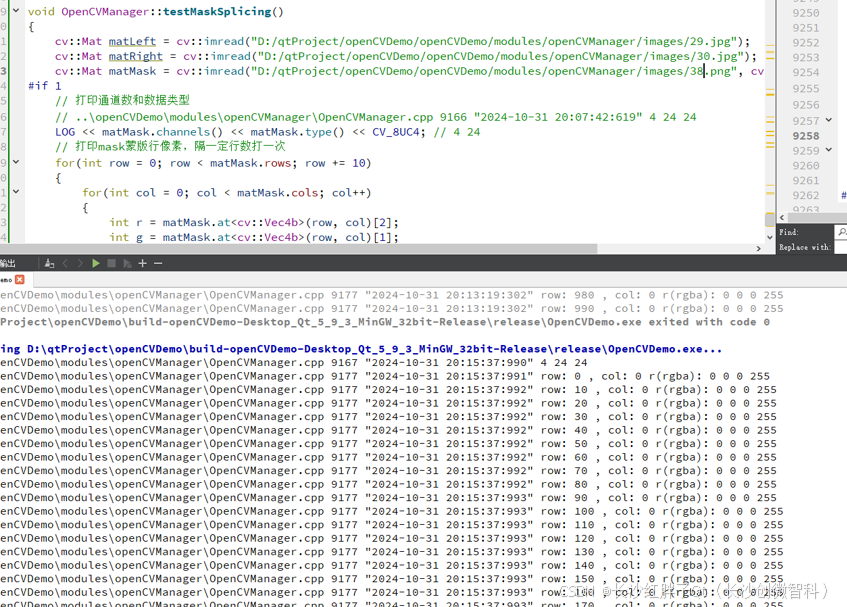
// 打印通道数和数据类型
// ..\openCVDemo\modules\openCVManager\OpenCVManager.cpp 9166 "2024-10-31 20:07:42:619" 4 24 24
LOG << matMask.channels() << matMask.type() << CV_8UC4; // 4 24
// 打印mask蒙版行像素,隔一定行数打一次
for(int row = 0; row < matMask.rows; row += 10)
{
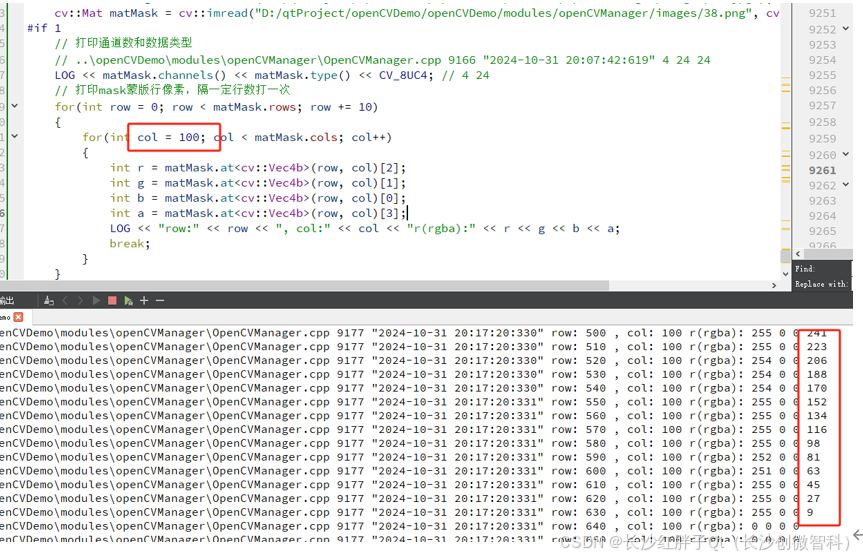
for(int col = 100; col < matMask.cols; col++)
{
int r = matMask.at<cv::Vec4b>(row, col)[2];
int g = matMask.at<cv::Vec4b>(row, col)[1];
int b = matMask.at<cv::Vec4b>(row, col)[0];
int a = matMask.at<cv::Vec4b>(row, col)[3];
LOG << "row:" << row << ", col:" << col << "r(rgba):" << r << g << b << a;
break;
}
}
#endif
// 图片较大,缩为原来的0.5倍
cv::resize(matLeft, matLeft, cv::Size(0, 0), 0.5, 0.5);
cv::resize(matRight, matRight, cv::Size(0, 0), 0.5, 0.5);
cv::resize(matMask1, matMask1, cv::Size(matLeft.cols, matLeft.rows));
cv::resize(matMask2, matMask2, cv::Size(matLeft.cols, matLeft.rows));
cv::resize(matMask3, matMask3, cv::Size(matLeft.cols, matLeft.rows));
cv::resize(matMask4, matMask4, cv::Size(matLeft.cols, matLeft.rows));
// 底图,扩大500横向,方便移动
cv::Mat matResult = cv::Mat(matLeft.rows, matLeft.cols + 500, CV_8UC3);
// 第一张图
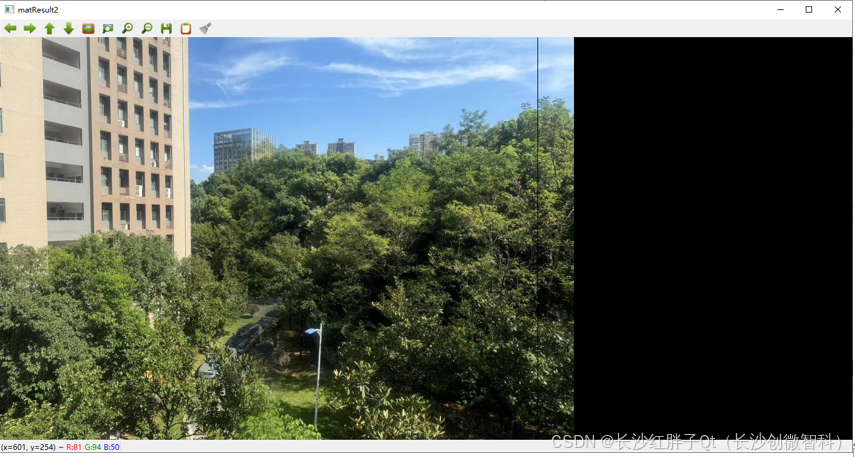
int key = 0;
int x = 0;
while(true)
{
// 副本,每次都要重新清空来调整
cv::Mat matResult2 = matResult.clone();
#if 1
// 第一张图,直接比例赋值,因为底图为0
for(int row = 0; row < matLeft.rows; row++)
{
for(int col = 0; col < matLeft.cols; col++)
{
double r = matMask1.at<cv::Vec4b>(row, col)[2] / 255.0f;
// double r = matMask2.at<cv::Vec4b>(row, col)[1] / 255.0f;
// double r = matMask3.at<cv::Vec4b>(row, col)[0] / 255.0f;
// double r = matMask4.at<cv::Vec4b>(row, col)[0] / 255.0f;
matResult2.at<cv::Vec3b>(row, col)[0] = (matLeft.at<cv::Vec3b>(row, col)[0] * r);
matResult2.at<cv::Vec3b>(row, col)[1] = (matLeft.at<cv::Vec3b>(row, col)[1] * r);
matResult2.at<cv::Vec3b>(row, col)[2] = (uchar)(matLeft.at<cv::Vec3b>(row, col)[2] * r);
}
}
#endif
#if 0
// 第二张图,加法,因为底图为原图了
for(int row = 0; row < matRight.rows; row++)
{
for(int col = 0; col < matRight.cols; col++)
{
double g = matMask2.at<cv::Vec4b>(row, col)[1] / 255.0f;
// 偏移了x坐标
matResult2.at<cv::Vec3b>(row, col + x)[0] += matRight.at<cv::Vec3b>(row, col)[0] * g;
matResult2.at<cv::Vec3b>(row, col + x)[1] += matRight.at<cv::Vec3b>(row, col)[1] * g;
matResult2.at<cv::Vec3b>(row, col + x)[2] += matRight.at<cv::Vec3b>(row, col)[2] * g;
}
}
#endif
#if 1
// 第二张图,加法,因为底图为原图了(优化)
for(int row = 0; row < matRight.rows; row++)
{
for(int col = 0; col < matRight.cols; col++)
{
double r2;
if(x + col <= matLeft.cols)
{
r2 = (255 - matMask1.at<cv::Vec4b>(row, col + x)[2]) / 255.0f;
}else{
r2 = 1.0f;
}
// 偏移了x坐标
matResult2.at<cv::Vec3b>(row, col + x)[0] += matRight.at<cv::Vec3b>(row, col)[0] * r2;
matResult2.at<cv::Vec3b>(row, col + x)[1] += matRight.at<cv::Vec3b>(row, col)[1] * r2;
matResult2.at<cv::Vec3b>(row, col + x)[2] += matRight.at<cv::Vec3b>(row, col)[2] * r2;
}
}
#endif
// cv::imshow("matMask1", matMask1);
// cv::imshow("matLeft", matLeft);
cv::imshow("matResult2", matResult2);
key = cv::waitKey(0);
if(key == 'a')
{
x--;
if(x < 0)
{
x = 0;
}
}else if(key == 'd')
{
x++;
if(x + matRight.cols > matResult2.cols)
{
x = matResult2.cols - matRight.cols;
}
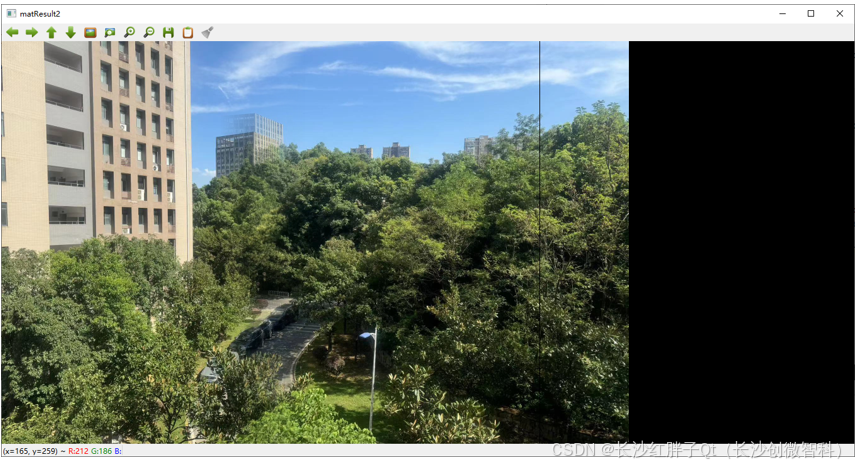
}else if(key == 'q')
{
break;
}
}
}
工程模板v1.72.0

入坑
入坑一:读取通道rgba失败
问题:读取通道rgba失败
原因
是uchar,转换成byte,而不是int
解决
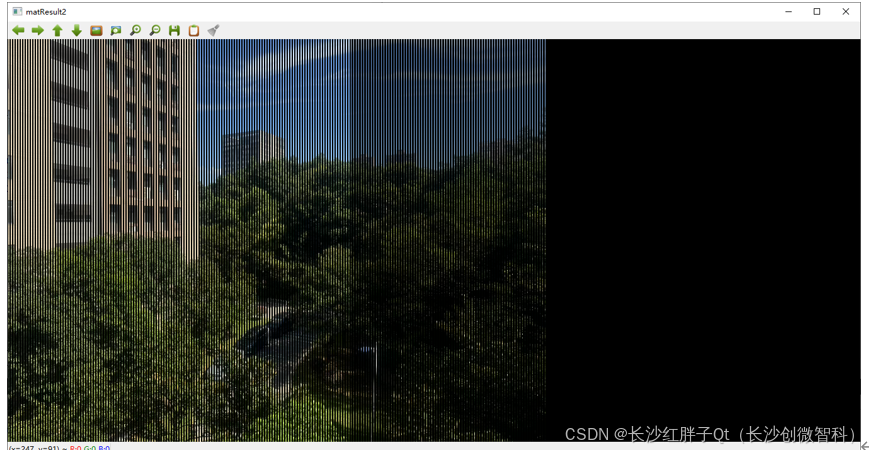
入坑二:读取通道一直是0,0,0,255
问题
读取通道一直是0,0,0,255。
原因
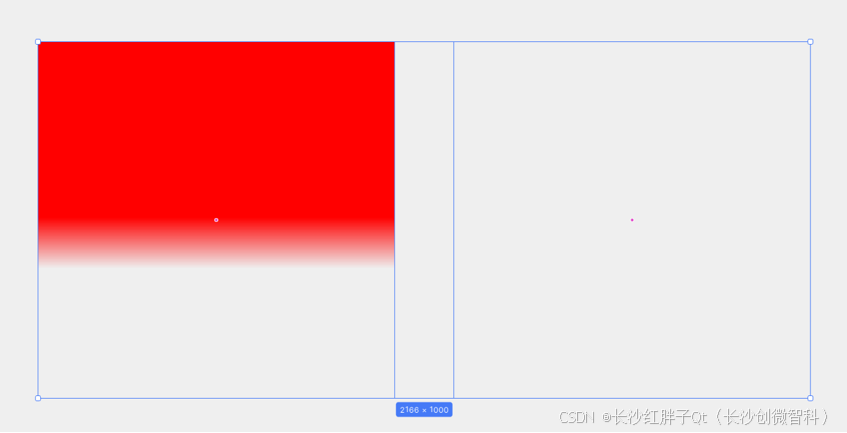
弄了张图,还是255,然后发现是为了截图更清楚,弄了个边框,而我们打印正好是打印了0位置。
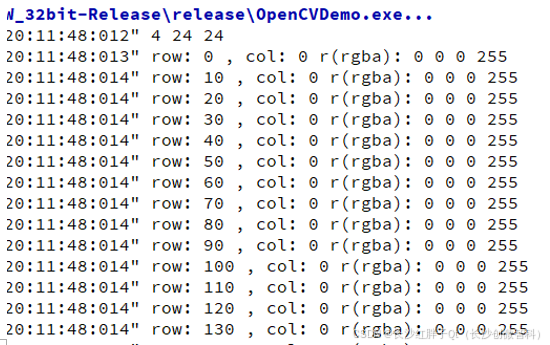
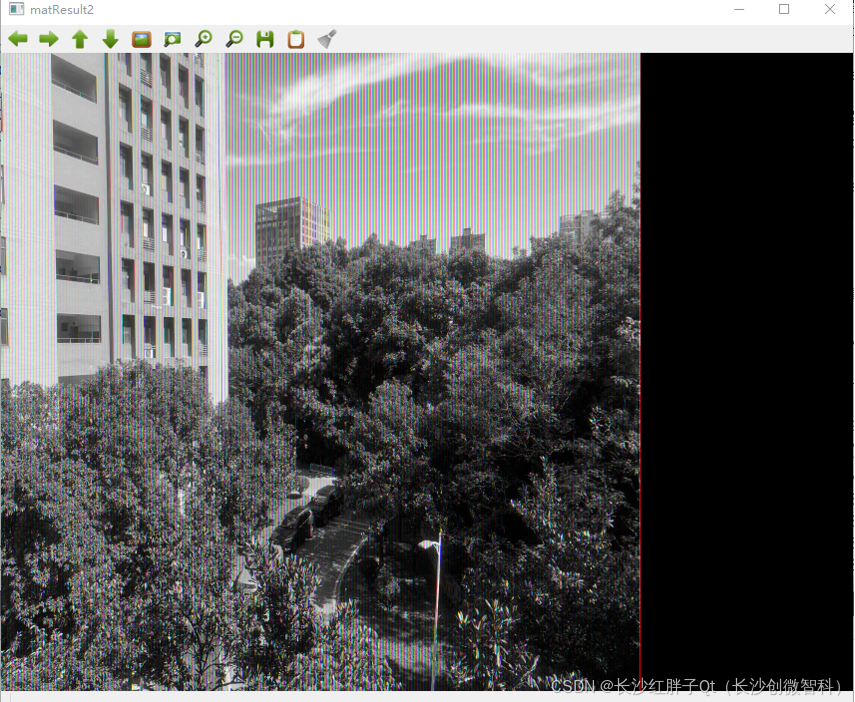
解决
最终是要去掉边框,没边框就是空看不出,如下图:

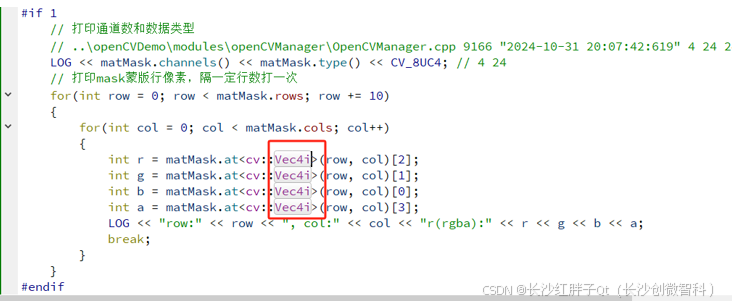
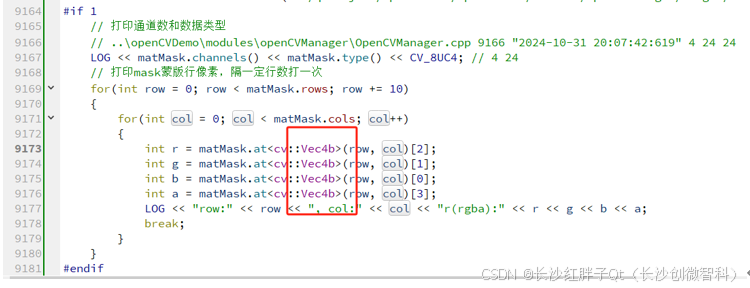
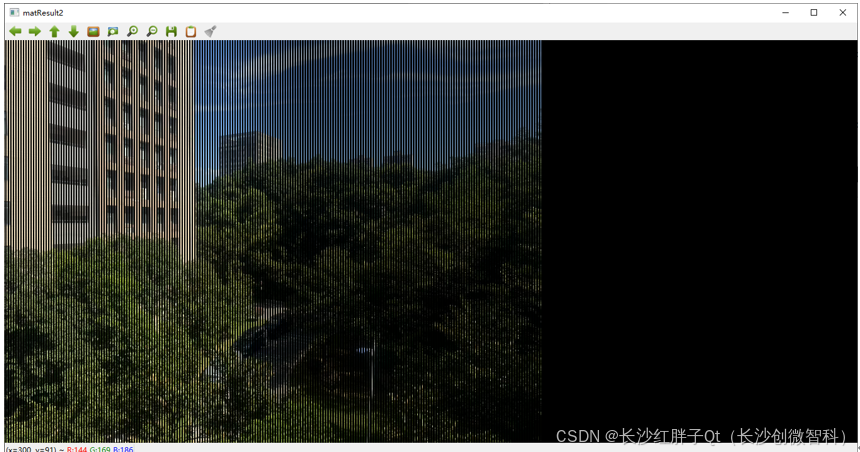
入坑三:过渡有黑线赋值不对
问题
直接位置赋值,出现条纹
原因
类型是vec4b
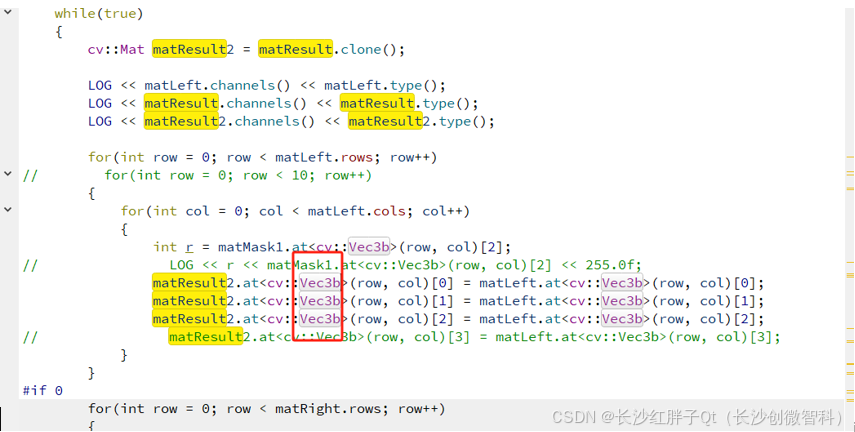
解决

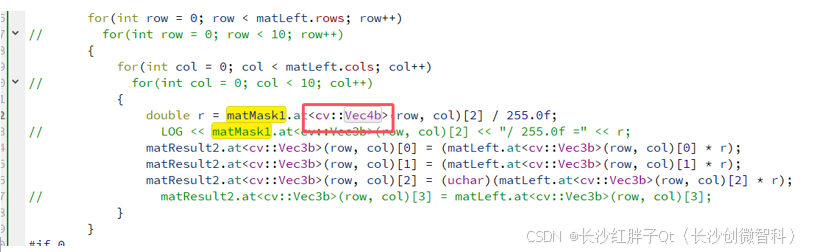
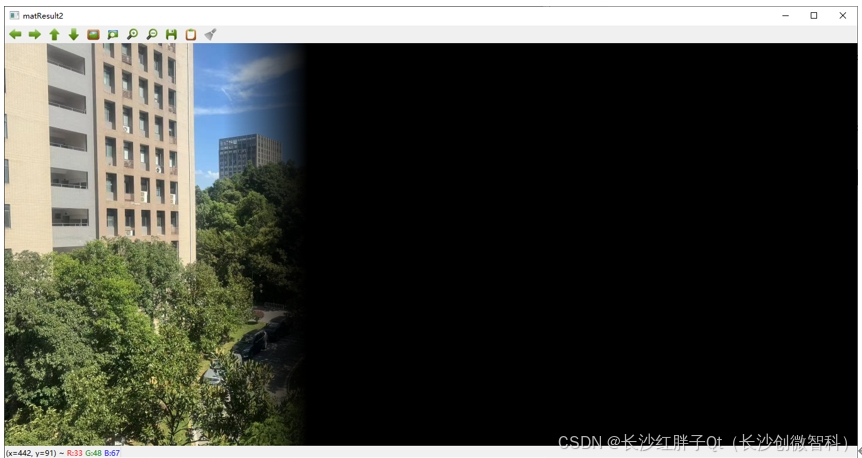
入坑四:原图融合比例有黑线
问题
原因
跟上面一样,mask蒙版是rgba的,需要vec4b
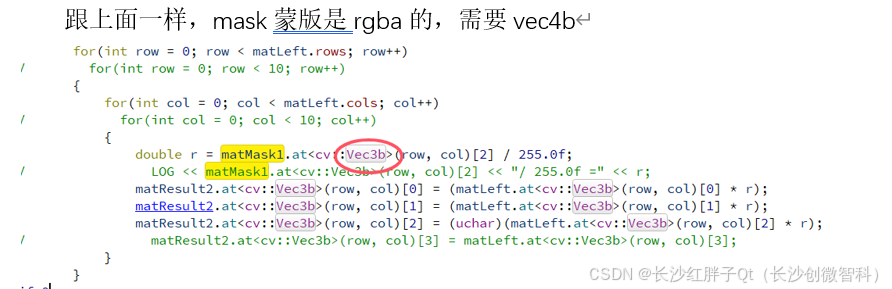
解决
OpenCV开发笔记(八十二):两图拼接使用渐进色蒙版场景过渡缝隙的更多相关文章
- 树莓派开发笔记(十二):入手研华ADVANTECH工控树莓派UNO-220套件(一):介绍和运行系统
前言 树莓派也可以做商业应用,工业控制,其稳定性和可靠性已经得到了验证,故而工业控制,一些停车场等场景也有采用树莓派作为主控的,本片介绍了研华ADVANTECH的树莓派套件组UNO-220-P4N ...
- .net开发笔记(十二) 设计时与运行时的区别(续)
上一篇博客详细讲到了设计时(DesignTime)和运行时(RunTime)的概念与区别,不过没有给出实际的Demo,今天整理了一下,做了一个例子,贴出来分享一下,巩固前一篇博客讲到的内容. 简单回顾 ...
- 安卓开发笔记(十二):SQLite数据库储存(上)
SQLite数据库存储(上) 创建数据库 Android专门提供了一个 SQLiteOpenHelper帮助类对数据库进行创建和升级 SQLiteOpenHelper需要创建一个自己的帮助类去继承它并 ...
- Java开发笔记(十二)布尔变量论道与或非
在编程语言的设计之初,它们除了可以进行数学计算,还常常用于逻辑推理和条件判断.为了实现逻辑判断的功能,Java引入了一种布尔类型boolean,用来表示“真”和“假”.该类型的变量只允许两个取值,即t ...
- PID控制器开发笔记之十二:模糊PID控制器的实现
在现实控制中,被控系统并非是线性时不变的,往往需要动态调整PID的参数,而模糊控制正好能够满足这一需求,所以在接下来的这一节我们将讨论模糊PID控制器的相关问题.模糊PID控制器是将模糊算法与PID控 ...
- ESP32 开发笔记(十二)LittlevGL 添加自定义字体和物理按键
LittlevGL 添加自定义字体获取字库 ttf 文件可以从一些网站上获取字库文件,比如请注意字体许可证 生成源文件使用 LittlevGL 提供的字库文件转换工具,将 ttf 字库文件转换为源文件 ...
- OpenCV开发笔记(七十二):红胖子8分钟带你使用opencv+dnn+tensorFlow识别物体
前言 级联分类器的效果并不是很好,准确度相对深度学习较低,本章使用opencv通过tensorflow深度学习,检测已有模型的分类. Demo 可以猜测,1其实是人,18序号类是狗 ...
- OpenCV开发笔记(六十五):红胖子8分钟带你深入了解ORB特征点(图文并茂+浅显易懂+程序源码)
若该文为原创文章,未经允许不得转载原博主博客地址:https://blog.csdn.net/qq21497936原博主博客导航:https://blog.csdn.net/qq21497936/ar ...
- OpenCV开发笔记(六十九):红胖子8分钟带你使用传统方法识别已知物体(图文并茂+浅显易懂+程序源码)
若该文为原创文章,未经允许不得转载原博主博客地址:https://blog.csdn.net/qq21497936原博主博客导航:https://blog.csdn.net/qq21497936/ar ...
- OpenCV开发笔记(五十五):红胖子8分钟带你深入了解Haar、LBP特征以及级联分类器识别过程(图文并茂+浅显易懂+程序源码)
若该文为原创文章,未经允许不得转载原博主博客地址:https://blog.csdn.net/qq21497936原博主博客导航:https://blog.csdn.net/qq21497936/ar ...
随机推荐
- mariadb5.5.56二进制离线安装
在生产环境中一般使用发布好的二进制版本,简单概括一下安装过程: 1. 下载 地址为:https://downloads.mariadb.org/mariadb/5.5.56/ 这里选择最新版本的5.5 ...
- css flex属性
css学的不咋熟,搞一个复杂一点的水平居中,用display 属性 + position属性 + float属性,搞了好久居然没搞出来,然后我去翻资料,发现我最不常用的flex能解决这个问题,于是我就 ...
- AWS EC2 实例类型命名规则
AWS EC2(Elastic Compute Cloud)实例类型的命名规则反映了实例的性能特征.用途和硬件配置.这些实例类型的名称由几个组件构成,每个组件都提供了关于该实例类型特定方面的信息.理解 ...
- 倾斜摄影osgb格式文件,进行坐标转换
倾斜摄影OSGB格式的文件,很棘手,今天需要把osgb放到UE中渲染.碰到的问题如下: 1.osgb文件导进去后,Z轴不想上,是歪的,小人放进去后,就斜站在马路上. 2.根本原因是坐标系,UE的插件c ...
- Maven的下载安装配置
Maven的下载安装配置 Maven是什么 Maven是基于项目对象模型(POM project object model),可以通过一小段描述信息(配置)来管理项目的构建,报告和文档的软件项目管理工 ...
- Electron32-ViteOS桌面版os系统|vue3+electron+arco客户端OS管理模板
基于electron32+vue3 setup+pinia2桌面端os管理解决方案ElectronVue3OS. vue3-electron32-os全新原创Electron32+Vite5+Vue3 ...
- 5.5文件上传-WAF绕过
一.WAF绕过(明确有文件上传) 1.上传参数中,可修改参数 Content-Dispositin:一般可改 name:表单参数,不可更改 filename:文件名,可更改 Content-Type: ...
- 以太坊Rollup方案之 arbitrum(1)
什么是Rollup? 以太坊的Rollup扩容是一种Layer 2(第二层)扩容解决方案,旨在提高以太坊区块链的交易吞吐量和性能.它通过将大量的交易数据转移到以太坊区块链之外的第二层网络来实现这一目标 ...
- 【VMware VCF】使用 VCF Import Tool 将现有 vSphere 环境转换为管理域。
VMware Cloud Foundation 5.2 发布并引入了一个新的功能,借助 VCF Import Tool 工具可以将现有 vSphere 环境直接转换(Convert)为管理工作负载域或 ...
- SuperMap iServer数据动态更新刷新地图与数据服务
更新:2022年6月27日 SuperMap iServer 11i 底层修改逻辑,增加智能指针.11i版本不需要以下操作即可实现 一.使用背景 有这么一个需求,后端也就通过SuperMap iDes ...