改进初学者的PID-初始化
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助。作者Brett Beauregard的原文网址:http://brettbeauregard.com/blog/2011/04/improving-the-beginner's-pid-initialization/
1、问题所在
在前一节中,我们实现了关闭和打开 PID 的功能。我们将其关闭,但现在让我们来看看当我们重新打开它时会发生什么:
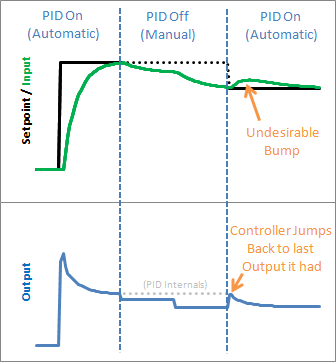
呵!PID跳回到它发送的最后一个输出值,然后从那里开始调整。这将导致我们不希望出现的输入颠簸。
2、解决方案
这个很容易解决。因为我们现在知道什么时候打开 (从手动到自动),我们只需为一个平稳的过渡做一些初始化。这意味着对2个工作变量的存储 (积分项和最后的输入项) 进行处理,以防止输出跳转。
3、代码
/*working variables*/
unsigned long lastTime;
double Input,Output,Setpoint;
double ITerm,lastInput;
double kp,ki,kd;
int SampleTime = ; //1 sec
double outMin,outMax;
bool inAuto = false; #define MANUAL 0
#define AUTOMATIC 1 void Compute()
{
if(!inAuto) return;
unsigned long now = millis();
int timeChange = (now - lastTime);
if(timeChange>=SampleTime)
{
/*Compute all the working error variables*/
double error = Setpoint - Input;
ITerm+= (ki * error);
if(ITerm> outMax) ITerm= outMax;
else if(ITerm< outMin) ITerm= outMin;
double dInput = (Input - lastInput); /*Compute PID Output*/
Output = kp * error + ITerm- kd * dInput;
if(Output> outMax) Output = outMax;
else if(Output < outMin) Output = outMin; /*Remember some variables for next time*/
lastInput = Input;
lastTime = now;
}
} void SetTunings(double Kp,double Ki,double Kd)
{
double SampleTimeInSec = ((double)SampleTime)/;
kp = Kp;
ki = Ki * SampleTimeInSec;
kd = Kd / SampleTimeInSec;
} void SetSampleTime(int NewSampleTime)
{
if (NewSampleTime > )
{
double ratio = (double)NewSampleTime
/ (double)SampleTime;
ki *= ratio;
kd /= ratio;
SampleTime = (unsigned long)NewSampleTime;
}
} void SetOutputLimits(double Min,double Max)
{
if(Min > Max) return;
outMin = Min;
outMax = Max; if(Output > outMax) Output = outMax;
else if(Output < outMin) Output = outMin; if(ITerm> outMax) ITerm= outMax;
else if(ITerm< outMin) ITerm= outMin;
} void SetMode(int Mode)
{
bool newAuto = (Mode == AUTOMATIC);
if(newAuto && !inAuto)
{ /*we just went from manual to auto*/
Initialize();
}
inAuto = newAuto;
} void Initialize()
{
lastInput = Input;
ITerm = Output;
if(ITerm> outMax) ITerm= outMax;
else if(ITerm< outMin) ITerm= outMin;
}
我们修改了 SetMode (...) 以检测从手动到自动的转换,并添加了初始化功能。它通过设置“积分项=输出”来处理积分项,“最后输入=输入”以防止微分激增。比例项不依赖于过去的任何信息,因此不需要任何初始化。
4、最终结果
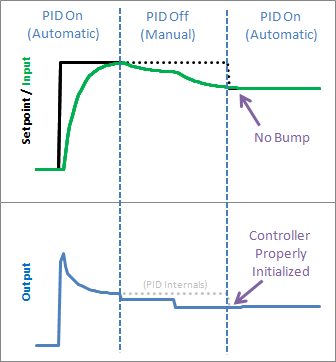
我们从上面的图表中看到,正确的初始化会导致从手动到自动的无扰动切换,这正是我们所追求的。
5、更新:为什么不 ITerm=0?
我最近收到了很多问题,问为什么我没有把 ITerm=0 设置为初始化。作为答案,我请您考虑以下方案:PID是手动的,用户已将输出设置为50。一段时间后,该过程稳定到75.2 的输入。用户将设置点75.2 打开 PID。会发生什么事?
我认为,切换到自动后,输出值应该保持在50。由于 P 和 D 项将为零,因此发生这种情况的唯一方法是将 ITerm项初始化为“输出”值。
如果您处于需要输出初始化为零的情况,则无需更改上面的代码。在将 PID 从“手动”转换为“自动”之前,只需在调用例程中设置Output=0。
欢迎关注:

改进初学者的PID-初始化的更多相关文章
- 改进初学者的PID-介绍
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
- 改进初学者的PID-正反作用
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
- 改进初学者的PID-修改整定参数
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
- 改进初学者的PID-采样时间
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
- 改进初学者的PID-测量的比例编码
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
- 改进初学者的PID-积分饱和
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
- 改进初学者的PID-测量的比例介绍
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
- 改进初学者的PID-手自动切换
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
- 改进初学者的PID-微分冲击
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
随机推荐
- 图森未来一道笔试题-迷宫难题【BFS找S->E的最短步数】
时间限制:3秒 空间限制:262144K 图森未来的自动驾驶小卡车今天被派到了一个陌生的迷宫内部运输一些货物. 工程师小图已经提前拿到了这个迷宫的地图,地图是一个n*m的字符矩阵,上面包含四种不同的字 ...
- python数据可视化(一)——绘制随机漫步图
数据可视化指的是通过可视化表示来探索数据,它与数据挖掘紧密相关. python有一系列的可视化和分析工具,最流行的工具之一是matplotlib,它是一个数学绘图库. 实现绘制随机漫步图 利用ra ...
- 1、Python简介与Python安装
一.Python简介: Python 是一个高层次的结合了解释性.编译性.互动性和面向对象的脚本语言. Python的创始人为吉多·范罗苏姆(Guido van Rossum)少数几个不秃头的语言创始 ...
- python完成数组格式的请求参数的加密计算
#输入 '''order_id:31489 join_course[0][join_tel]:13130999882 join_course[0][join_name]:任学雨 join_course ...
- hdu3625
hdu3625 题意: 酒店发生一起谋杀案.作为镇上最好的侦探,您应该立即检查酒店的所有N个房间.但是,房间的所有门都是锁着的,钥匙刚锁在房间里,真是个陷阱!您知道每个房间里只有一把钥匙,并且所有可能 ...
- LeetCode 731. My Calendar II
原题链接在这里:https://leetcode.com/problems/my-calendar-ii/ 题目: Implement a MyCalendarTwo class to store y ...
- SpringBoot第二节(SpringBoot整合Mybatis)
1.创建Spring Initiallizr项目 一直点击下一步 2.引入依赖 <dependencies> <dependency> <groupId>org.s ...
- IntelliJ IDEA 查找两个字符之间任意内容正则表达式
表达式: A.*?B(“.“表示任意字符,“?”表示匹配0个或多个)
- 蚂蚁金服开源机器学习工具SQLFlow,机器学习比SQL还简单
来自:开源最前线(ID:OpenSourceTop) 综合自:AI前线.https://github.com/sql-machine-learning/sqlflow 5月6日,蚂蚁金服副 CTO 胡 ...
- GoCN每日新闻(2019-10-24)
GoCN每日新闻(2019-10-24) GoCN每日新闻(2019-10-24) 1. 学习Golang之服务器框架编写 – CS网络通信 http://1t.click/aJag 2. 如何实现 ...