AI佳作解读系列(五) - 目标检测二十年技术综述

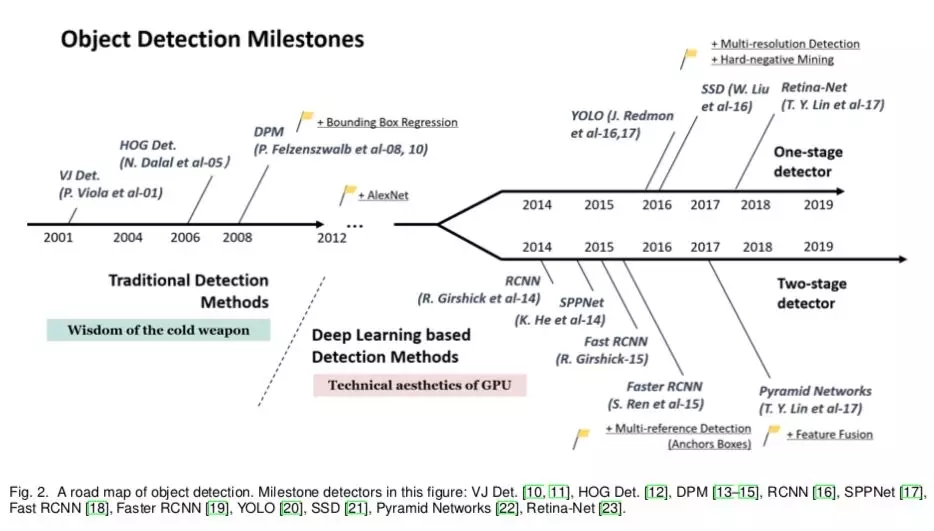
- 目标检测路线图

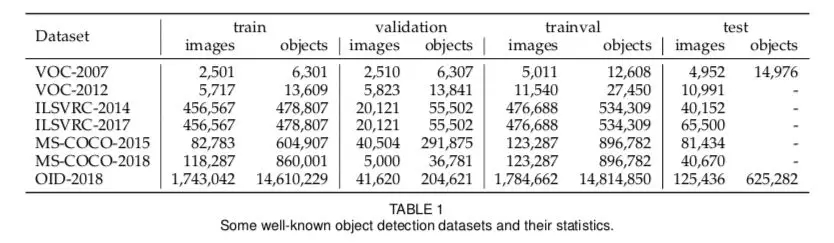
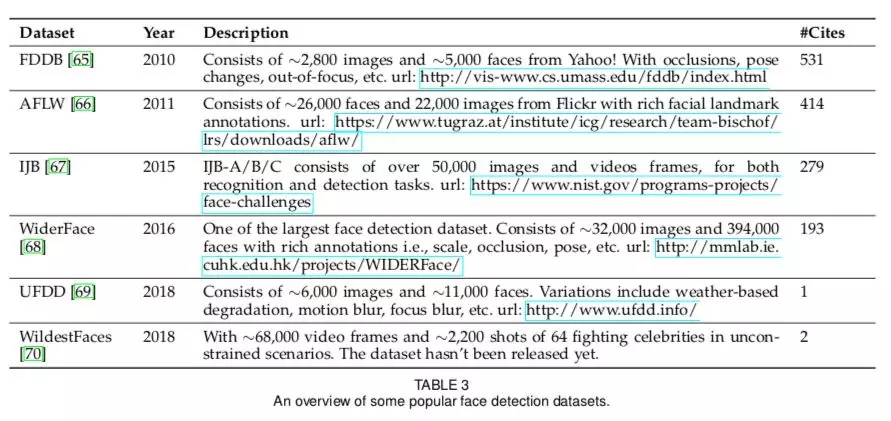
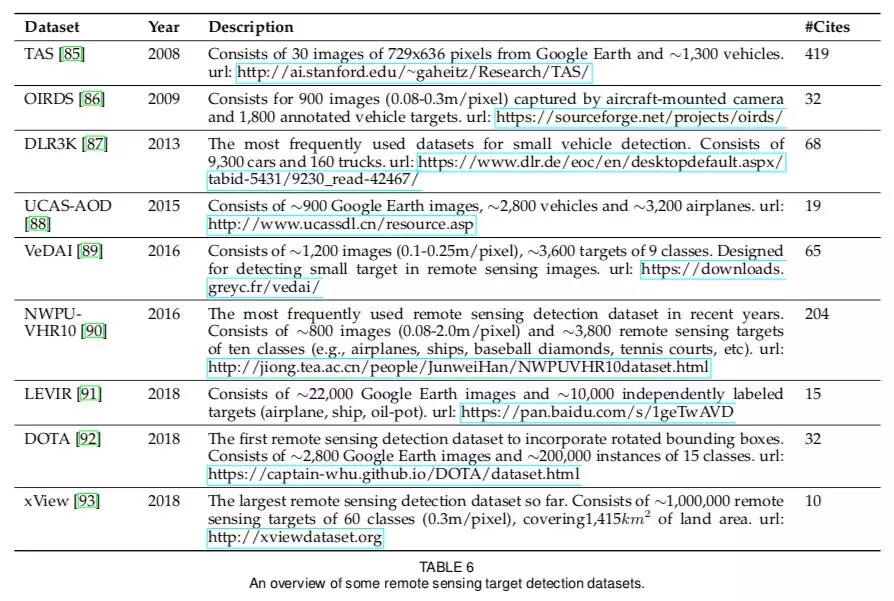
- 目标检测数据集




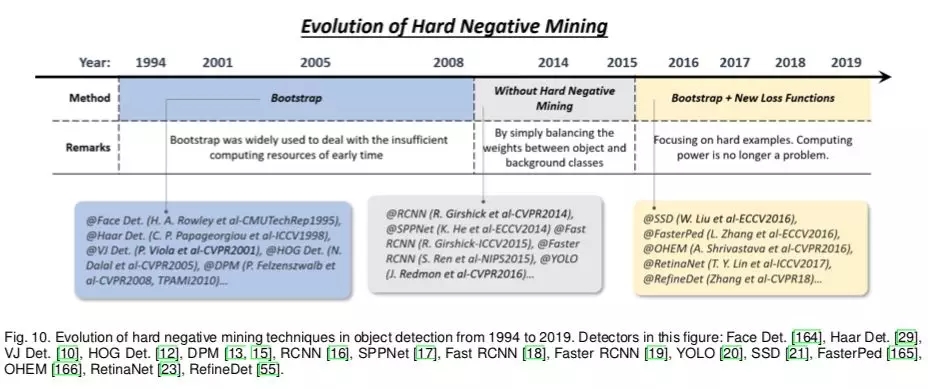
- 目标检测技术演进


- 目标检测计算加速

- 数值计算层次(如积分图、矢量量化等)
- 检测引擎层次(网络剪枝与量化、轻量级网络设计等)
- 检测流程层次(特征图共享、分类器加速、级连检测等)

- 目标检测进展
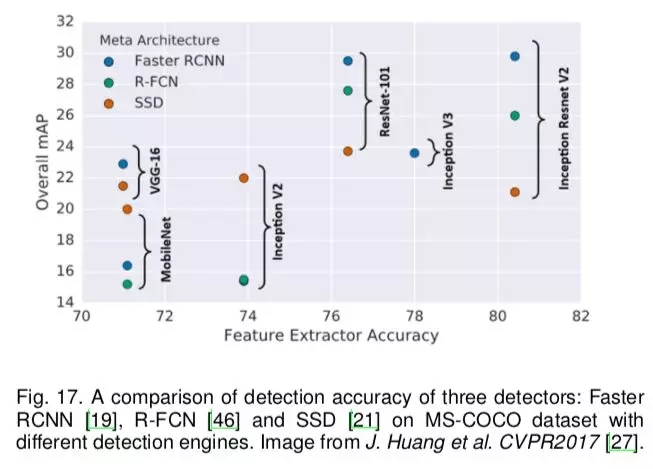
- 更好地引擎(engine):作者将深度学习目标检测网络的骨干网称为其引擎。改进目标检测的一个直接思路就是使用更加先进的骨干网。如下图(相同算法用相同颜色的圆点表示,使用相同引擎的算法结果用一个大括号连接,我们可以轻易看出,使用不同的引擎对最终精度的影响更大):
- 使用更好的特征:1)特征融合;2)学习大感受野的高分辨率特征
- 超越滑动窗口:不再是局限于候选区域再分类的模式。作者提到两种新模式:1)子区域搜索 sub-region search。将目标检测看为从初始网格到最终ground truth box的路径规划过程。2)关键点定位。将目标检测看为特定语义点定位的过程。比如:ECCV18 Oral | CornerNet目标检测开启预测“边界框”到预测“点对”的新思路Grid R-CNN解读:商汤目标检测算法
- 目标定位改进:1)包围框提精。2)改进loss函数用于较精确定位。比如:CVPR 2019 | 旷视提出新型目标检测损失函数:定位更精准
- 检测与分割一起进行:分割可以帮助目标检测提高类别识别的精度、获得更好地目标定位、潜入更加丰富的上下文。分割的网络可以作为目标检测的提取网络,也可以作为多任务学习的损失函数,用以改进目标检测。52CV曾经报道过一篇文章甚至分割完全可以用来替换检测:目标检测:Segmentation is All You Need ?
- 旋转和尺度变化鲁棒的目标检测:针对旋转变化鲁棒改进方向:1)旋转不变损失函数;2)旋转校正;3)Rotation RoI Pooling。针对尺度变化鲁棒的改进:1)尺度自适应训练;2)尺度自适应检测。
- Training from Scratch:不使用预训练模型,从头开始训练目标检测网络。比如:CVPR 2019 | 京东AI研究院提出ScratchDet,加强对小目标的检测,代码将开源。
- 对抗训练:比如有研究表明,GAN可以用来改进小目标的检测。
- 弱监督的目标检测:不使用包围框标注,而仅使用图像级的目标标注的算法。减少标注成本。扩大训练集。
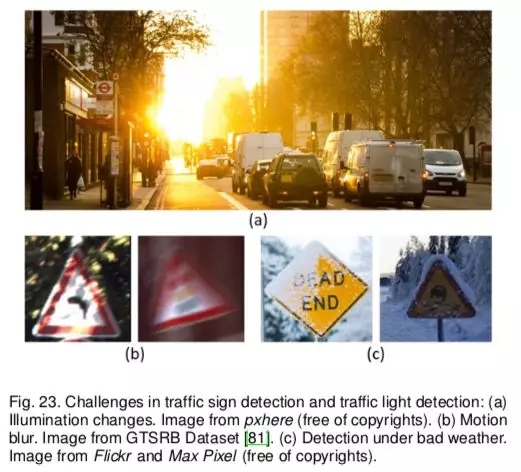
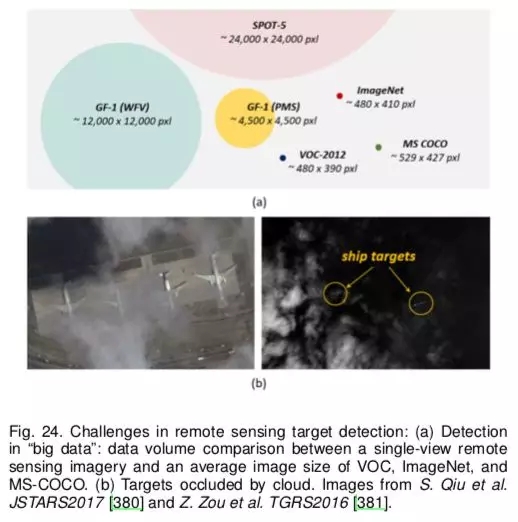
- 目标检测应用

- 目标检测的未来方向
- 轻量级目标检测算法;
- 用AutoML设计目标检测算法,比如:Google CVPR 2019成果!用神经架构搜索实现更好的目标检测
- 域适应(domain adaptation)改进目标检测;
- 弱监督的目标检测;
- 小目标检测;
- 视频目标检测
- 融合其他传感器信息的目标检测。
AI佳作解读系列(五) - 目标检测二十年技术综述的更多相关文章
- AI佳作解读系列(二)——目标检测AI算法集杂谈:R-CNN,faster R-CNN,yolo,SSD,yoloV2,yoloV3
1 引言 深度学习目前已经应用到了各个领域,应用场景大体分为三类:物体识别,目标检测,自然语言处理.本文着重与分析目标检测领域的深度学习方法,对其中的经典模型框架进行深入分析. 目标检测可以理解为是物 ...
- AI佳作解读系列(六) - 生成对抗网络(GAN)综述精华
注:本文来自机器之心的PaperWeekly系列:万字综述之生成对抗网络(GAN),如有侵权,请联系删除,谢谢! 前阵子学习 GAN 的过程发现现在的 GAN 综述文章大都是 2016 年 Ian G ...
- AI佳作解读系列(一)——深度学习模型训练痛点及解决方法
1 模型训练基本步骤 进入了AI领域,学习了手写字识别等几个demo后,就会发现深度学习模型训练是十分关键和有挑战性的.选定了网络结构后,深度学习训练过程基本大同小异,一般分为如下几个步骤 定义算法公 ...
- AI佳作解读系列(四)——数据增强篇
前言 在深度学习的应用过程中,数据的重要性不言而喻.继上篇介绍了数据合成(个人认为其在某种程度上可被看成一种数据增强方法)这个主题后,本篇聚焦于数据增强来介绍几篇杰作! (1)NanoNets : H ...
- AI佳作解读系列(三)——深度学习中的合成数据研究
Below are some investigation resources for synthetic datasets: 1. Synthetic datasets vs. real images ...
- CVPR2019目标检测方法进展综述
CVPR2019目标检测方法进展综述 置顶 2019年03月20日 14:14:04 SIGAI_csdn 阅读数 5869更多 分类专栏: 机器学习 人工智能 AI SIGAI 版权声明:本文为 ...
- Google AI推出新的大规模目标检测挑战赛
来源 | Towards Data Science 整理 | 磐石 就在几天前,Google AI在Kaggle上推出了一项名为Open Images Challenge的大规模目标检测竞赛.当今计算 ...
- Alamofire源码解读系列(五)之结果封装(Result)
本篇讲解Result的封装 前言 有时候,我们会根据现实中的事物来对程序中的某个业务关系进行抽象,这句话很难理解.在Alamofire中,使用Response来描述请求后的结果.我们都知道Alamof ...
- deeplearning.ai 卷积神经网络 Week 3 目标检测 听课笔记
本周的主题是对象检测(object detection):不但需要检测出物体(image classification),还要能定位出在图片的具体位置(classification with loca ...
随机推荐
- python - 登陆验证的滑块接口
----------------- 滑块接口 ----------------- 0:大体思路:点击登陆按钮的时候会进行第一次验证(滑块验证),然后访问后台滑块接口,并返回验证结果,如果滑块接口通 ...
- Intel 80386 CPU
一.80386 概述 80386处理器被广泛应用在1980年代中期到1990年代中期的IBM PC相容机中.这些PC机称为「80386电脑」或「386电脑」,有时也简称「80386」或「386」.80 ...
- windows错误代码摘录
Windows API 错误代码定义在winerror.h里,当我们得到一个Error Code不知其意时,可以查阅这个文件 这里定义了绝大部分的错误,摘录翻译如下 [0]-操作成功完成. [1]-功 ...
- info命令
info命令也可以查看命令的信息,但是和man命令不同,info命令如同一本书,一个命令只不过是书中的一个章节. 1.基本结构: 输入:info ls ls命令只不过是整个文档的10.1章节. 而在章 ...
- cf 911F 树的直径+贪心
$des$ 给定一棵 n 个节点的树,你可以进行 n ? 1 次操作,每次操作步骤如下:选择 u,v 两个度数为 1 的节点.将 u,v 之间的距离加到 ans 上.将 u 从树上删除.求一个操作序列 ...
- 数组splay ------ luogu P3369 【模板】普通平衡树(Treap/SBT)
二次联通门 : luogu P3369 [模板]普通平衡树(Treap/SBT) #include <cstdio> #define Max 100005 #define Inline _ ...
- 【一起来烧脑】读懂HTTP知识体系
背景 读懂HTTP很重要,参加过面试的小伙伴都很清楚,无论是技术面试面试题出得怎样,都有机会让你讲解一下HTTP,大部分都会问一下. 面试官:考考你网络协议的知识,TCP协议和UDP协议的区别,HTT ...
- docker-machine 远程安装docker
base=https://github.com/docker/machine/releases/download/v0.14.0 && curl -L $base/docker-mac ...
- 第07组 团队Git现场编程实战
组员职责分工 团队成员 分工 杨明哲 爬数据,做网页 林兴源 合作编码完成了对美团数据的分析,分析出最有发展潜力的十佳好店 卞永亨 从大众点评分析出了服装商圈 林鑫 合作编码完成了对美团数据的分析,分 ...
- Rancher2.3.2部署Kubenetes Dashboard
首先进入到集群中的System命令空间,因为kubenetes dashboard是给整个集群使用的,并不是默认的Default命名空间使用的 Default命名空间,是默认的命名空间,也是在部署其他 ...