ROS-SLAM仿真-hector
前言:hector_slam可以很好的在空中机器人,手持构图设备及特种机器人中运行。
hector_slam不需要订阅里程计信息/odmo消息,而是直接使用激光估算里程计信息,因此,当机器人速度较快时会发生打滑现象,导致建图效果出现误差。
前提:已下载并编译了相关功能包集,如还未下载,可通过git下载:https://github.com/huchunxu/ros_exploring.git
一、安装hector_slam功能包
ros中已集成了hector_slam功能包
sudo apt-get install ros-kinetic-hector-slam
二、在Gzebo中仿真SLAM
2.1 启动仿真环境
cd ~/catkin_ws/src/robot_mrobot/mrobot_gazebo/launchroslaunch mrobot_laser_nav_gazebo.launch
2.2 启动slam导航
cd ~/catkin_ws/src/robot_mrobot/mrobot_navigation/launch roslaunch hector_demo.launch
2.3 启动键盘控制
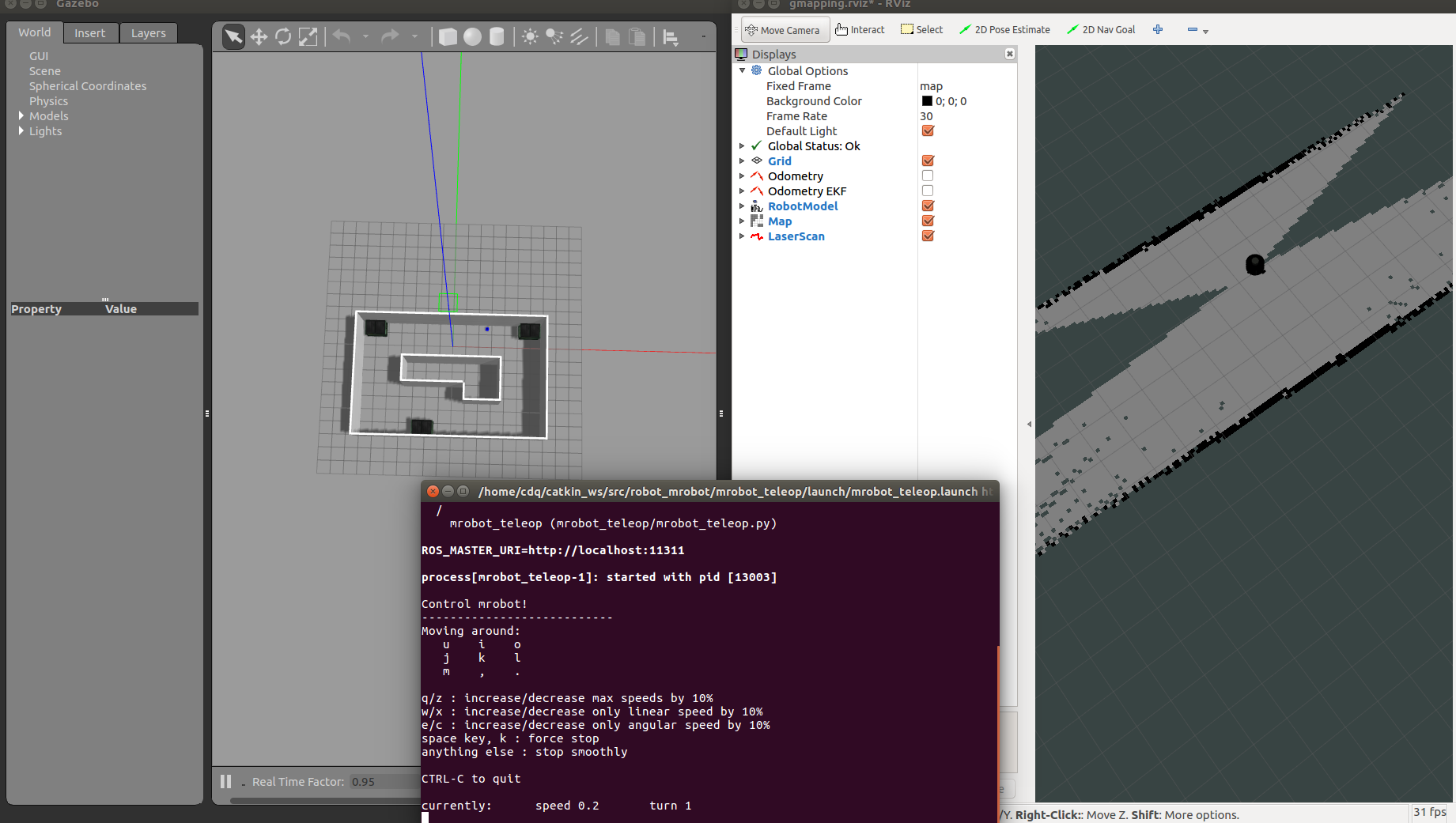
roslaunch mrobot_teleop mrobot_teleop.launch
-----------------------------------------
显示如下:
-END-
ROS-SLAM仿真-hector的更多相关文章
- 【ros】rplidar Hector Slam
想用rplidar跑一下hector slam,在网上发现了几个教程写的都不错,但是亲测发现都有点不足,综合了一下,进行补充. 1. 安装ros 和 创建工作空间 http://blog.csdn.n ...
- ROS学习笔记十二:使用gazebo在ROS中仿真
想要在ROS系统中对我们的机器人进行仿真,需要使用gazebo. gazebo是一种适用于复杂室内多机器人和室外环境的仿真环境.它能够在三维环境中对多个机器人.传感器及物体进行仿真,产生实际传感器反馈 ...
- 论文阅读:hector_slam: A Flexible and Scalable SLAM System with Full 3D Motion Estimation.
参考:<A Flexible and Scalable SLAM System with Full 3D Motion Estimation.> 该论文是ROS中hector_mappin ...
- 视觉SLAM漫淡(二):图优化理论与g2o的使用
视觉SLAM漫谈(二):图优化理论与g2o的使用 1 前言以及回顾 各位朋友,自从上一篇<视觉SLAM漫谈>写成以来已经有一段时间了.我收到几位热心读者的邮件.有的希望我介绍一下当前 ...
- 2D激光SLAM算法比较+cartographer
Hector slam: Hector slam利用高斯牛顿方法解决scan-matching问题,对传感器要求较高. 缺点:需要雷达(LRS)的更新频率较高,测量噪声小.所以在制图过程中,需要rob ...
- ROS机器人导航一 : 从英雄联盟到ROS导航
写在前面: 这是这个系列的第一篇 本系列主要从零开始深入探索ROS(机器人操作系统)的导航和规划. 这个系列的目标,是让大家了解: 1.ROS的导航是怎么实现的 2.认识ROS里各种已有的导航算法,清 ...
- ROS机器人操作系统相关书籍、资料和学习路径
作者:Top Liu链接:https://zhuanlan.zhihu.com/p/30391098来源:知乎著作权归作者所有.商业转载请联系作者获得授权,非商业转载请注明出处. 本文是易科机器人实验 ...
- stage_ros的world文件配置方法
官方文档参阅:http://rtv.github.io/Stage/modules.html stage_ros是一个基于stage的2D模拟器,用于ROS的仿真测试.虽然现在越来越多的人在使用gaz ...
- rplidar & hector slam without odometry
接上一篇:1.rplidar测试 方式一:测试使用rplidar A2跑一下手持的hector slam,参考文章:用hector mapping构建地图 但是roslaunch exbotxi_br ...
随机推荐
- 从实现HTML页面局部刷新到JSONP
也可以用iframe方法发get请求,但是目前iframe基本已经被弃用,所以此处就不介绍这个方法. 方案一:用图片造 get 请求 button.addEventListener('click', ...
- Redhat/CentOS xfs文件系统及磁盘挂载
#!/bin/sh #DEVICE_LIST=""DEVICE_LIST="/dev/sda /dev/sdb /dev/sdc /dev/sdd /dev/sde /d ...
- Windows Phone - 按钮/button 控件
System.Windows.Controls.Button button控件一.button控件的各种样式的展示可以通过 …… 来给控件定义公共的样式调用样式的方法:在Button控件上添加样式 ...
- 我的C++笔记(语句基本结构)
#include <iostream> using namespace std; int main() { unsigned char c1=24; int year; bool isLe ...
- (转)基于MVC4+EasyUI的Web开发框架形成之旅--总体介绍
http://www.cnblogs.com/wuhuacong/p/3281103.html 最近花了很多时间在重构和进一步提炼Winform开发框架的工作上,加上时不时有一些项目的开发工作,我博客 ...
- nginx的缓存设置提高性能
对于网站的图片,尤其是新闻站, 图片一旦发布, 改动的可能是非常小的.我们希望 能否在用户访问一次后, 图片缓存在用户的浏览器端,且时间比较长的缓存. 可以, 用到 nginx的expires设置 . ...
- BZOJ1150 [CTSC2007] 数据备份Backup 贪心_堆_神题
Description 你在一家 IT 公司为大型写字楼或办公楼(offices)的计算机数据做备份.然而数据备份的工作是枯燥乏味 的,因此你想设计一个系统让不同的办公楼彼此之间互相备份,而你则坐在家 ...
- Python——Day2(笔记代码)
# test = "大pandaboy"# v=test.capitalize()#首字母大写,当为汉字时失效# print(v)######################### ...
- springboot 打包下载数据
//文件打包下载 public static HttpServletResponse downLoadFiles(List<File> files, Htt ...
- HDU-1695 GCD(求一个区间内与一个数互质的个数)
题意: 给你一个T,是样例的个数,接下来是五个数l1,r1,l2,r2,k 前四个数代表两个区间(l1,r1),(l2,r2)这个题l1=1,l2=1; 取x1属于(1,r1),x2属于(1,r2) ...