8. Linear Transformations
8.1 Linear Requires
Keys:
A linear transformation T takes vectors v to vectors T(v). Linearity requires:
\[T(cv +dw) = cT(v) + dT(w)
\]The input vectors v and outputs T(v) can be in \(R^n\) or matrix space or function space.
If A is m by n, \(T(x)=Ax\) is linear from the input space \(R^n\) to the output space \(R^m\).
The derivative \(T(f)=\frac{df}{dx}\) is linear.The integral \(T^+(f)=\int^x_0f(t)dt\) is its pseudoinverse.
Derivative: \(1,x,x^2 \rightarrow 1,x\)
\[u = a + bx + cx^2 \\
\Downarrow \\
Au = \left [ \begin{matrix} 0&1&0 \\ 0&0&2 \end{matrix} \right]
\left [ \begin{matrix} a \\ b \\ c \end{matrix} \right]
=\left [ \begin{matrix} b \\ 2c \end{matrix} \right] \\
\Downarrow \\
\frac{du}{dx} = b + 2cx
\]Integration: \(1,x \rightarrow x,x^2\)
\[\int^x_0(D+Ex)dx= Dx + \frac{1}{2}Ex^2 \\
\Downarrow \\
input \ \ v \ \ (D+Ex) \\
A^+v = \left[ \begin{matrix} 0&0 \\ 1&0 \\ 0&\frac{1}{2} \end{matrix} \right]
\left[ \begin{matrix} D \\ E \end{matrix} \right]
=\left[ \begin{matrix} 0 \\D \\ \frac{1}{2}E \end{matrix} \right] \\
\Downarrow \\
T^+(v) = Dx + \frac{1}{2}Ex^2
\]The product ST of two linear transformations is still linear : \((ST)(v)=S(T(v))\)
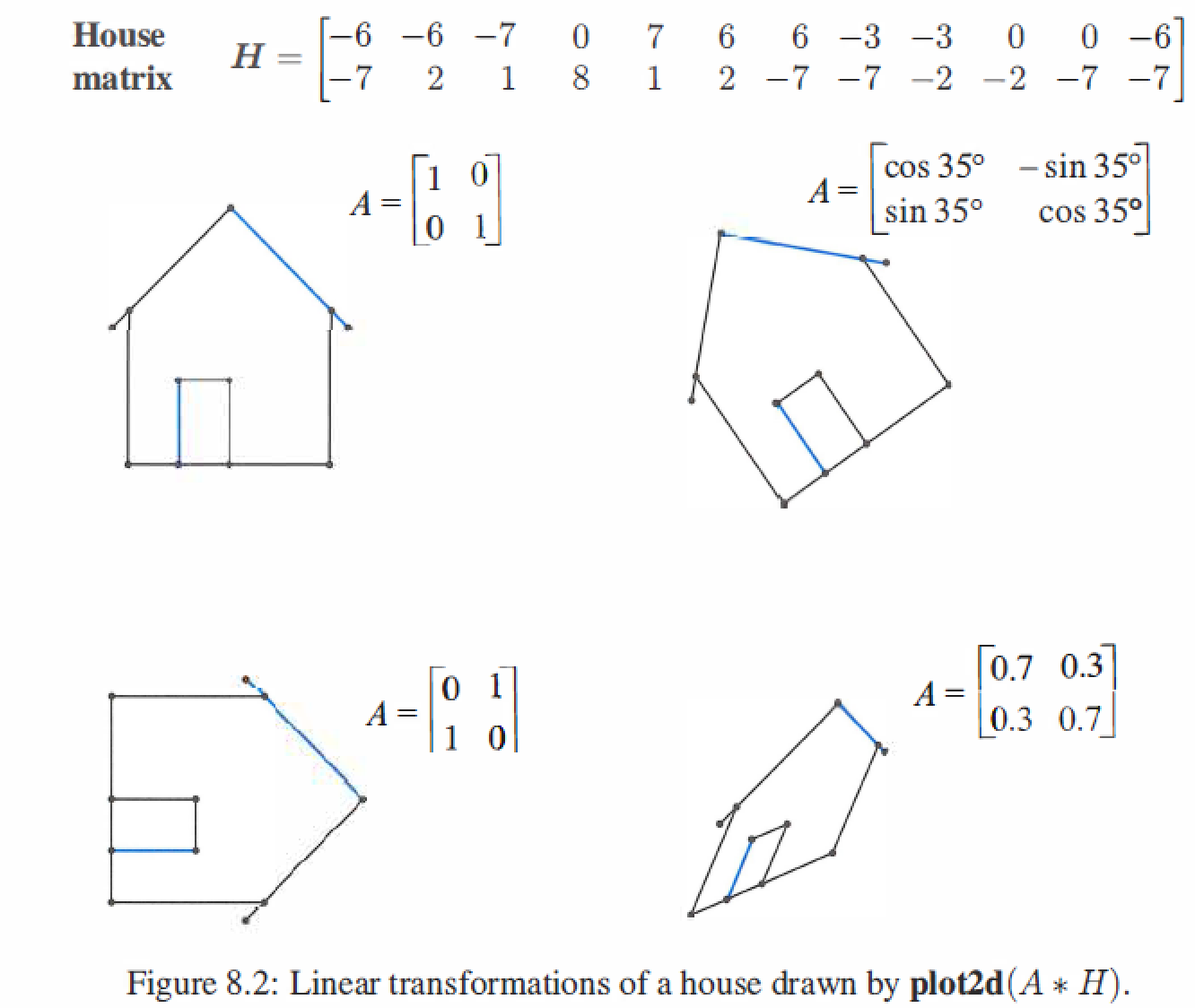
Linear : rotated or stretched or other linear transformations.
8.2 Matrix instead of Linear Transformation
We can assign a matrix A to instead of every linear transformation T.
For ordinary column vectors, the input v is in \(V=R^n\) and the output \(T(v)\) is in \(W=R^m\), The matrix A for this transformation will be m by n.Our choice of bases in V and W will decide A.
8.2.1 Change of Basis
if \(T(v) = v\) means T is the identiy transformation.
If input bases = output bases, then the matrix \(I\) will be choosed.
If input bases not equal to output bases, then we can construct new matrix \(B=W^{-1}V\).
example:
\[input \ \ basis \ \ [v_1 \ \ v_2] = \left [ \begin{matrix} 3&6 \\ 3&8 \end{matrix} \right] \\
output \ \ basis \ \ [w_1 \ \ w_2] = \left [ \begin{matrix} 3&0 \\ 1&2 \end{matrix} \right] \\
\Downarrow \\
v_1 = 1w_1 + 1w_2 \\
v_2 = 2w_1 + 3w_2 \\
\Downarrow \\
[w_1 \ \ w_2] [B] = [v_1 \ \ v_2] \\
\Downarrow \\
\left [ \begin{matrix} 3&0 \\ 1&2 \end{matrix} \right]
\left [ \begin{matrix} 1&2 \\ 1&3 \end{matrix} \right]
=
\left [ \begin{matrix} 3&6 \\ 3&8 \end{matrix} \right]
\]when the input basis is in the columns of V, and the output basis is in the columns of W, the change of basis matrix for \(T\) is \(B=W^{-1}V\).
Suppose the same vector u is written in input basis of v's and output basis of w's:
\[u=c_1v_1 + \cdots + c_nv_n \\
u=d_1w_1 + \cdots + d_nw_n \\
\left [ \begin{matrix} v_1 \cdots v_n \end{matrix} \right]
\left [ \begin{matrix} c_1 \\ \vdots \\ c_n \end{matrix} \right]
=
\left [ \begin{matrix} w_1 \cdots w_n \end{matrix} \right]
\left [ \begin{matrix} d_1 \\ \vdots \\ d_n \end{matrix} \right]
\\
Vc=Wd \\
d = W^{-1}Vc = Bc \\
\]c is coordinates of input basis, d is coordinates of output basis.
8.2.2 Construction Matrix
Suppose T transforms the space V to space W. We choose a basis \(v_1,v_2,...,v_n\) for V and a basis \(w_1,w_2,...,w_n\) for W.
=a_{1j}w_1 + \cdots + a_{mj}w_m
\]
The \(a_{ij}\) are into A.
T(v) =\frac{dv}{dx} = 1c_2 + 2c_3x + 3c_4x^2 \\
Ac=\left[ \begin{matrix} 0&1&0&0 \\ 0&0&2&0\\ 0&0&0&3 \end{matrix} \right]
\left[ \begin{matrix} c_1 \\ c_2 \\ c_3 \\ c_4 \end{matrix} \right]
=\left[ \begin{matrix} c_2 \\ 2c_3 \\ 3c_4 \end{matrix} \right]
\]
T takes the derivative, A is "derivative matrix".
8.2.3 Choosing the Best Bases
The same T is represented by different matrices when we choose different bases.
Perfect basis
Eigenvectors are the perfect basis vectors.They produce the eigenvalues matrix \(\Lambda = X^{-1}AX\)
Input basis = output basis
The new basis of b's is similar to A in the standard basis:
\]
Different basis
Probably A is not symmetric or even square, we can choose the right singular vectors (\(v_1,...,v_n\)) as input basis and the left singular vectors(\(u_1,...,u_n\)) as output basis.
\]
\(\Sigma\) is "isometric" to A.
Definition : \(C=Q^{-1}_1AQ_{2}\) is isometric to A if \(Q_1\) and \(Q_2\) are orthogonal.
8.2.4 The Search of a Good Basis
Keys: fast and few basis.
- $B_{in} = B_{out} = $ eigenvector matrix X . Then \(X^{-1}AX\)= eigenvalues in \(\Lambda\).
- $B_{in} = V \ , \ B_{out} = U $ : singular vectors of A. Then \(U^{-1}AV\)= singular values in \(\Sigma\).
- $B_{in} = B_{out} = $ generalized eigenvectors of A . Then \(B^{-1}AB\)= Jordan form \(J\).
- $B_{in} = B_{out} = $ Fourier matrix F . Then \(Fx\) is a Discrete Fourier Transform of x.
- The Fourier basis : \(1,sinx,cosx,sin2x,cos2x,...\)
- The Legendre basis : \(1, x, x^2 - \frac{1}{3},x^3 - \frac{3}{5},...\)
- The Chebyshev basis : \(1, x, 2x^2 - 1,4x^3 - 3x,...\)
- The Wavelet basis.
8. Linear Transformations的更多相关文章
- Linear transformations. 线性变换与矩阵的关系
0.2.2 Linear transformations. Let U be an n-dimensional vector space and let V be an m-dimensional v ...
- 线性代数导论 | Linear Algebra 课程
搞统计的线性代数和概率论必须精通,最好要能锻炼出直觉,再学机器学习才会事半功倍. 线性代数只推荐Prof. Gilbert Strang的MIT课程,有视频,有教材,有习题,有考试,一套学下来基本就入 ...
- transformations 变换集合关系 仿射变换
http://groups.csail.mit.edu/graphics/classes/6.837/F03/lectures/04_transformations.ppt https://group ...
- paper 128:奇异值分解(SVD) --- 线性变换几何意义[转]
PS:一直以来对SVD分解似懂非懂,此文为译文,原文以细致的分析+大量的可视化图形演示了SVD的几何意义.能在有限的篇幅把这个问题讲解的如此清晰,实属不易.原文举了一个简单的图像处理问题,简单形象,真 ...
- 特征向量-Eigenvalues_and_eigenvectors#Graphs
https://en.wikipedia.org/wiki/Eigenvalues_and_eigenvectors#Graphs A {\displaystyle A} ...
- 转载:奇异值分解(SVD) --- 线性变换几何意义(上)
本文转载自他人: PS:一直以来对SVD分解似懂非懂,此文为译文,原文以细致的分析+大量的可视化图形演示了SVD的几何意义.能在有限的篇幅把这个问题讲解的如此清晰,实属不易.原文举了一个简单的图像处理 ...
- (转) Deep Learning in a Nutshell: Core Concepts
Deep Learning in a Nutshell: Core Concepts Share: Posted on November 3, 2015by Tim Dettmers 7 Comm ...
- We Recommend a Singular Value Decomposition
We Recommend a Singular Value Decomposition Introduction The topic of this article, the singular val ...
- A geometric interpretation of the covariance matrix
A geometric interpretation of the covariance matrix Contents [hide] 1 Introduction 2 Eigendecomposit ...
- <转>机器学习笔记之奇异值分解的几何解释与简单应用
看到的一篇比较好的关于SVD几何解释与简单应用的文章,其实是有中文译本的,但是翻译的太烂,还不如直接看英文原文的.课本上学的往往是知其然不知其所以然,希望这篇文能为所有初学svd的童鞋提供些直观的认识 ...
随机推荐
- 旅游景点 Tourist Attractions (壮压 DP)题解
简化题意 题目链接--不卡内存班 题目链接--卡内存版 给定 \(n\) 个点和 \(m\) 条边组成的无向图,按照一定限制要求停留 \(2\sim k+1\) 共 \(k\) 个点(可以经过但不停留 ...
- STL-unordered_map,unordered_set模拟实现
unordered_set #pragma once #include"28hashtable_container.h" namespace test { //template & ...
- Java 从键盘读入学生成绩 找出最高分 并输出学生等级成绩 * 成绩>=最高分-10 等级为’A‘ * 成绩>=最高分-20 等级为’B‘ * 成绩>=最高分-30 等级为'C' * 其余 等级为’D‘
1 /* 2 * 从键盘读入学生成绩 找出最高分 并输出学生等级成绩 3 * 成绩>=最高分-10 等级为'A' 4 * 成绩>=最高分-20 等级为'B' 5 * 成绩>=最高分- ...
- 2022_vue3笔记
由于公司项目有vue2.5,自己电脑又要3.2,总不可能总是安装删除环境,这儿使用安装nvm版本管理 安装node前配置一下镜像地址 node_mirror: https://npm.taobao.o ...
- 使用 Docker 部署 GLPI 资产管理系统
1)GLPI 介绍 GLPI 简介 参考: https://github.com/glpi-project/glpi 官方文档:https://glpi-project.org/documentati ...
- linux c 打印时间最简单的实例
最简单的代码,能够解决最棘手的问题,才是解决工程师的需要: #include <stdio.h> #include <time.h> #include <unistd.h ...
- javascript之call用法实例
call方法: 调用一个对象的一个方法,以另一个对象替换当前对象. 直接上代码: js例子:在A类中调用B类数据 function ClassA(){ this.name = 'ClassA' ...
- iis管理器界面打不开
iis管理器界面打不开 图形界面打不开 服务正常运行 开始->运行->输入以下重置下 inetmgr.exe /reset
- Python简单程序设计(Average篇)
如题: 解题方式如下:
- 基于QGIS生产建筑物高度与遥感影像数据集
1. 概述 利用遥感影像推知建筑物高度是一经典研究,现有很多学者利用机器学习的方式,利用现有数据进行训练从而构建模型 本文旨在记述使用QGIS进行建筑物高度与遥感影像数据集的获取与制作 如果不想自己动 ...