异步简析之BlockingCollection实现生产消费模式
目前市面上有诸多的产品实现队列功能,比如Redis、MemCache等...
其实c#中也有一个基础的集合类专门用来实现生产/消费模式 (生产模式还是建议使用Redis等产品)
下面是官方的一些资料和介绍:
BlockingCollection是一个线程安全集合类,可提供以下功能:
实现制造者-使用者模式。
通过多线程并发添加和获取项。
可选最大容量。
集合为空或已满时通过插入和移除操作进行阻塞。
插入和移除“尝试”操作不发生阻塞,或在指定时间段内发生阻塞。
封装实现 IProducerConsumerCollection 的任何集合类型
使用取消标记执行取消操作。
支持使用 foreach(在 Visual Basic 中,使用 For Each)的两种枚举:
只读枚举。
在枚举项时将项移除的枚举。
BlockingCollection 支持限制和阻塞。 限制意味着可以设置集合的最大容量。 限制在某些情况中很重要,因为它使你能够控制内存中的集合的最大大小,并可阻止制造线程移动到离使用线程前方太远的位置。
可以看到该类是完全线程安全的,因此用来做生产/消费是非常合适的
如下代码演示了该类在异步环境中很好的执行着生产和消费任务
using System;
using System.Collections.Concurrent;
using System.Diagnostics;
using System.Globalization;
using System.Threading;
using System.Threading.Tasks;
using Xunit; namespace AsyncLearning
{
public class TestProduceAndConsumer
{
/// <summary>
/// BlockingCollection是线程安全的集合类型,支持多线程同时读写
/// </summary>
private readonly BlockingCollection<string> _blockingQueue =
new BlockingCollection<string>(); private void Produce()
{
for (int i = 0; i < 10; i++) //限制生产1000次
{
var now = DateTime.Now.ToString(CultureInfo.InvariantCulture);
Debug.WriteLine($"第{i+1}次生产! {now}");
_blockingQueue.Add(now);
Thread.Sleep(1000); //特意减慢生产过程以至于不会太快。。。方便演示
} _blockingQueue.CompleteAdding(); //标记生产完成
} private void Consume()
{
int i = 1;
while (!_blockingQueue.IsCompleted)
{
var x = _blockingQueue.Take();
Debug.WriteLine($"第{i}次消费 {x}");
i++;
Thread.Sleep(2000); //故意减慢消费
}
} [Fact]
public void Test()
{ Task.WaitAll(Task.Run(() => { Produce(); }), Task.Run(() => { Consume(); }));
}
}
}
输出如下:
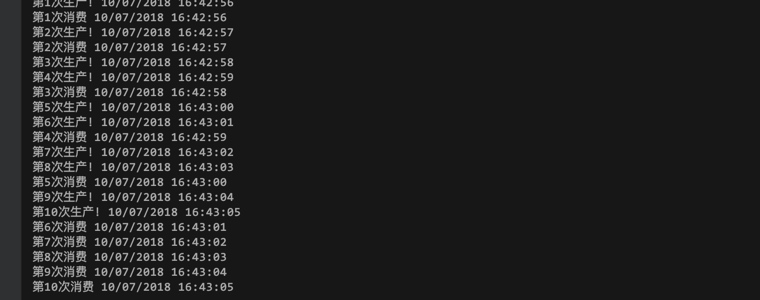 

可见Demo很好的按照设定执行了代码逻辑,由于故意设定了不同的sleep时间,可以看到消费是晚于生产的,而消费全部完成后本Demo的任务全部结束
异步简析之BlockingCollection实现生产消费模式的更多相关文章
- zxing二维码扫描的流程简析(Android版)
目前市面上二维码的扫描似乎用开源google的zxing比较多,接下去以2.2版本做一个简析吧,勿喷... 下载下来后定位两个文件夹,core和android,core是一些核心的库,android是 ...
- [转载] Thrift原理简析(JAVA)
转载自http://shift-alt-ctrl.iteye.com/blog/1987416 Apache Thrift是一个跨语言的服务框架,本质上为RPC,同时具有序列化.发序列化机制:当我们开 ...
- SpringMVC源码情操陶冶-DispatcherServlet简析(二)
承接前文SpringMVC源码情操陶冶-DispatcherServlet类简析(一),主要讲述初始化的操作,本文将简单介绍springmvc如何处理请求 DispatcherServlet#doDi ...
- 简析 __init__、__new__、__call__ 方法
简析 __init__.__new__.__call__ 方法 任何事物都有一个从创建,被使用,再到消亡的过程,在程序语言面向对象编程模型中,对象也有相似的命运:创建.初始化.使 用.垃圾回收,不同的 ...
- Linux 目录结构学习与简析 Part2
linux目录结构学习与简析 by:授客 QQ:1033553122 ---------------接Part 1-------------- #1.查看CPU信息 #cat /proc/cpuinf ...
- Linux 磁盘分区方案简析
Linux 磁盘分区方案简析 by:授客 QQ:1033553122 磁盘分区 任何硬盘在使用前都要进行分区.硬盘的分区有两种类型:主分区和扩展分区.一个硬盘上最多只能有4个主分区,其中一个主分区 ...
- 0002 - Spring MVC 拦截器源码简析:拦截器加载与执行
1.概述 Spring MVC中的拦截器(Interceptor)类似于Servlet中的过滤器(Filter),它主要用于拦截用户请求并作相应的处理.例如通过拦截器可以进行权限验证.记录请求信息的日 ...
- 简析 Tomcat 、Nginx 与 Apache 的区别
简析 Tomcat .Nginx 与 Apache 的区别 本文讲的是简析 Tomcat .Nginx 与Apache的区别, 经常在用 apache 和 tomcat 等这些服务器,可是总感觉还是不 ...
- Linux VFS机制简析(二)
Linux VFS机制简析(二) 接上一篇Linux VFS机制简析(一),本篇继续介绍有关Address space和address operations.file和file operations. ...
随机推荐
- Atcoder刷题小记
1. 2019.4.27 agc016d 一道很坑的题. 首先判无解,求出异或值后排个序就可以. 然后直接让\(a_i\rightarrow b_i\)并查集维护,注意离散化和判重,答案加上联通块个数 ...
- I/O模型系列之二:Unix的五种网络I/O模型
1. Unix的五种I/O模型 从上往下:阻塞程度(高-----低)I/O效率 (低-----高) 阻塞I/O(Blocking I/O):传统的IO模型 非阻塞I/O(Non-Blocking I ...
- sql server登录名、服务器角色、数据库用户、数据库角色、架构区别联系
原创链接:https://www.cnblogs.com/lxf1117/p/6762315.html sql server登录名.服务器角色.数据库用户.数据库角色.架构区别联系 1.一个数据库用户 ...
- CSS部分语法1
<!-- 第1部分 CSS规则特性 1 继承性:父元素样式可以被子元素继承,一般只能继承颜色和字体: 2 层叠性:给一个元素设置不同声明,效果会叠加: 3 优先级:给同一个元素设置相同声明,效果 ...
- (三)初探maven之使用IDE
一.在IDE中使用maven 打开Eclipse,在菜单栏依次选中window => preferences => Maven => Installations , 然后添加 ...
- Frp基础配置模版
Frp基础配置模版存档,供参考: 不写注释说明了,直接上模板: frps.ini [common] bind_port = 7000 privilege_token = password vhost_ ...
- 发送邮件,出现异常:服务器响应为: Error: need EHLO and AUTH first !"
在使用 System.Net.Mail组建发送邮件的时候出现了"命令顺序不正确. 服务器响应为: Error: need EHLO and AUTH first !"异常 解决方法 ...
- 20155324《网络对抗》Exp2 后门原理与实践
20155324<网络对抗>Exp2 后门原理与实践 20155324<网络对抗>Exp2 后门原理与实践 常用后门工具实践 Windows获得Linux Shell 在Win ...
- RLException: XXX is neither a launch file in package XXX nor is XXX a launch file name问题解决
在运行roslaunch时出现了类似下面的错误: RLException: XXX is neither a launch file in package XXX nor is XXX a launc ...
- (三)ORB特征匹配
ORBSLAM2匹配方法流程 在基于特征点的视觉SLAM系统中,特征匹配是数据关联最重要的方法.特征匹配为后端优化提供初值信息,也为前端提供较好的里程计信息,可见,若特征匹配出现问题,则整个视觉SLA ...