teb教程5
跟随全局规划器
简介:本部分是关于如何配置局部规划器严格跟随全局规划,也包括调节在时优和路径跟随上的权衡。
1.先看一下via-points当前的优化行为:启动下面节点
roslaunch teb_local_planner test_optim_node.launch
rosrun rqt_reconfigure rqt_reconfigure
为了方便调试参数(默认via-points并为开启)
现在设置global_plan_viapoint-sep为一个正值。正值就激活了via-points的考虑。
在rviz上选择publish point,该publish point在起始和结束之间的,为了添加一个点需要选择一个对象,也可以简单任意在栅格上选择一个点。
如下图所示:
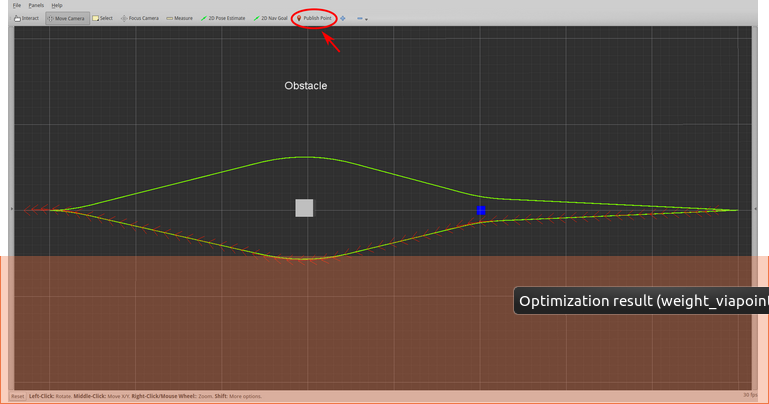
轨迹确实会被via-point所吸引,但是轨迹不能reach到它。主要原因是优化器会尝试找到时间最小化的轨迹同时最小化到via-point的距离。在这里有两个冲突的对象只要via-point不直接在最小化时间轨迹上的话。产生的全局最小是经过对目标对象权衡后的。通过在代价函数中增加权重,用户可以设置期望的选择来是全局最小化转移。
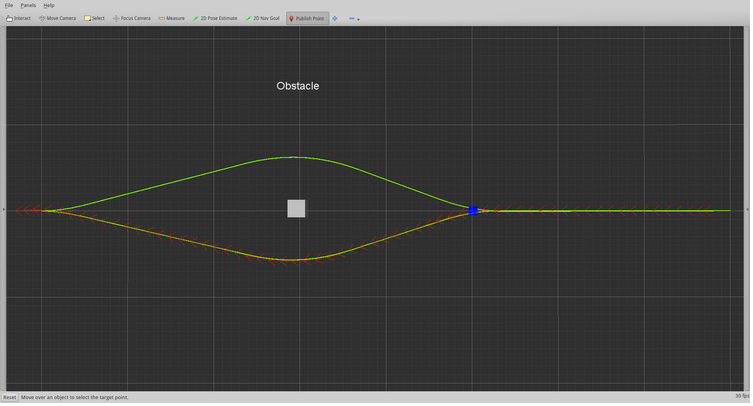
最小化到via-point的距离的权重由weight_viapoint所决定,现在增加该值大于1.
下图设置的weight_viapoint为10的结果:
现在可以尝试增加更多的via-point,然后调整weight_viapoint,观察会发生什么。
注意:障碍物避障(保持与障碍物最小的距离)可能会与最小化与via-point的距离相冲突。不要选择weight_viapoint的值太大,以便obstacle 代价是可忽略的了。
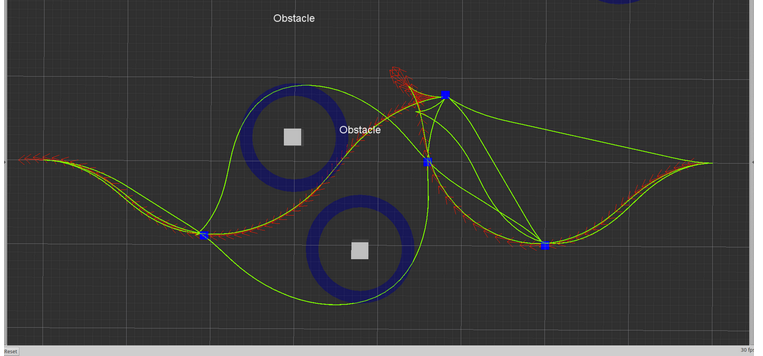
规划器甚至适用于更复杂的场景,例如:当访问一组任意的via-points点集的时候,可以在到达目标的时间是最小的。
如果在轨迹上相对于via-point的最近点是起始或者目标位姿,然后via-point会被忽略。因此你添加的via-points在开始之前或者在结束之后都不会被考虑进来。不影响导航行为,因为轨迹是根据全局规划来初始化的。
2.在替代的拓扑中规划
两个不同策略的使用取决于参数viapoints_all_candidates的选择:
1).设置为真,所有生成的候选轨迹与via-points相联系的,每一个对应的优化器会尝试最小化到他们的距离。
2).设置为假,只有候选的轨迹,该轨迹属于全局规划相对于via-point优化后的拓扑才会被考虑,其他均被忽略。
3.导航:跟随全局规划
运行如下节点:
roslaunch teb_local_planner_tutorials robot_diff_drive_in_stage.launch
rosrun rqt_reconfigure rqt_reconfigure
根据优化的例子,通过设置global_plan_via_point_sep为正值0.5来使能via-points.
在rviz上设置新的目标点,参数global_plan_via_point_sep的值定义了在全局规划上两个连续的via-points点之间的最小分割距离。例如设置为0.5米,每0.5米一个新的点从全局规划中选择出来(只要全局规划的分辨率足够)。因此,通过调整这个值,你可以指定是否一个粗糙的或者一个精细的参考路径被考虑进来用于路径跟随。
现在设置不同的目标点以及不同的global_plan_via_point_sep以及weight_viapoint的值。
注意,一个太精细的分辨率对于一个大的优化权重来说,可能会影响障碍物避障行为,特别是对于动态障碍物。
teb教程5的更多相关文章
- teb教程1
http://wiki.ros.org/teb_local_planner/Tutorials/Setup%20and%20test%20Optimization 简介:本部分关于teb怎样优化轨迹以 ...
- teb教程8
融合动态障碍物 简介:考虑怎样把其他节点发布的动态障碍物考虑进来 1.本部分演示了动态障碍物该如何被包含到teb_local_planner中. 2.写一个简单的动态障碍物的发布器publish_dy ...
- teb教程3
配置和运行机器人导航 简介:配置teb_local_planner作为navigation中local planner的插件 参考teb安装 由于局部代价地图的大小和分辨率对优化性能影响很大,因为占据 ...
- teb教程10 teb questions
http://wiki.ros.org/teb_local_planner/Tutorials/Frequently%20Asked%20Questions
- teb教程9
通过costmap_converter来跟踪和包含动态障碍物 简介:利用costmap_converter来很容易跟踪动态障碍物 1.costmap_converter中提供了一个插件称之为costm ...
- teb教程7
融合自定义的障碍物 简介:本部分讲解怎样考虑其他节点发布的多边形的障碍物. 1.在一些应用当中,可能不想依赖于代价地图或者想添加其他的除了点状的障碍物.你可以发送你自己的障碍物列表到teb_local ...
- teb教程6
代价地图的转换 简介:本部分关于怎样把代价地图转换插件应用到转换占据栅格costmap2d到几何形状来优化(测试阶段) teb_local_planner包支持costmap_converter插件, ...
- teb教程4
障碍物避障以及机器人足迹模型 简介:障碍物避障的实现,以及必要参数的设置对于机器人足迹模型和其对应的影响 1.障碍物避障是怎样工作的 1.1 惩罚项 障碍物避障作为整个路径优化的一部分.显然,优化是找 ...
- teb教程2
http://wiki.ros.org/teb_local_planner/Tutorials/Inspect%20optimization%20feedback 检查优化反馈 简介:怎样检查优化的轨 ...
随机推荐
- kubernetes(k8s)容器集群管理
Kubernetes介绍 Kubernetes是google在2014年6月开源的一个容器集群管理系统,使用go语言开发,Kubernetes也称k8s. k8s是google内部一个叫borg的容器 ...
- HDFS学习笔记一
一,HDFS是什么,HDFS有什么用,HDFS怎么用 HDFS:Hadoop Distribute File System 分布式文件系统 HDFS可以保证文件存储的可靠性, 二.HDFS的设计原则 ...
- spring 事物(二)—— 编程式事物实现与扩展
简介 使用TransactionTemplate 不需要显式地开始事务,甚至不需要显式地提交事务.这些步骤都由模板完成.但出现异常时,应通过TransactionStatus 的setRollback ...
- webacp4.0
'use strict';const path = require('path'); var APP_PATH = path.resolve(__dirname, 'src');const webpa ...
- Codeforces 1178F DP
题意:有一张白纸条,你需要给这张纸条染色.染色从颜色1开始染色,每次选择纸条的一段染色时,这一段的颜色必须是相同的.现在给你染色后的纸条,问有多少种染色方案? F1: 思路:最开始的想法是以染色顺序为 ...
- Java中File的处理
不知道“文件”和“文件路径”是否存在的处理情况 1.如果是文件,先获取文件父路径,没有就生成父路径,然后再生成文件. public class TestMain { public static voi ...
- mongodb C#连接报错 Invalid credentials for database 'admin'
这2天学习mongodb3.2.9,用户设置好了,结果用C#查询的时候报错了,看字面意思是用户验证没通过,但是我用shell是完全没有问题的,后来网上搜了下,发现原来是我用的是旧驱动,旧驱动用的是旧的 ...
- hdu4857 拓扑排序
题目大意: 糟糕的事情发生啦,现在大家都忙着逃命.但是逃命的通道很窄,大家只能排成一行. 现在有n个人,从1标号到n.同时有一些奇怪的约束条件,每个都形如:a必须在b之前. 同时,社会是不平等的,这些 ...
- iSkysoft iMedia Converter Deluxe for Mac的使用方法
我们电脑上的播放器大多数的播放格式都比较少,所以在播放其它格式的时候容易出错,不能兼容其它的视频格式.今天小编要给大家推荐一种软件,iSkysoft iMedia Converter Deluxe就是 ...
- 【集群】JedisCluster 原理
1. JedisCluster类结构 JedisCluster是针对RedisCluster的java客户端,它封装了java访问redis集群的各种操作,包括初始化连接.请求重定向等.我们先来看下J ...