teb教程7
融合自定义的障碍物
简介:本部分讲解怎样考虑其他节点发布的多边形的障碍物。
1.在一些应用当中,可能不想依赖于代价地图或者想添加其他的除了点状的障碍物。你可以发送你自己的障碍物列表到teb_local_planner包里面,通过指定话题/obstacles.
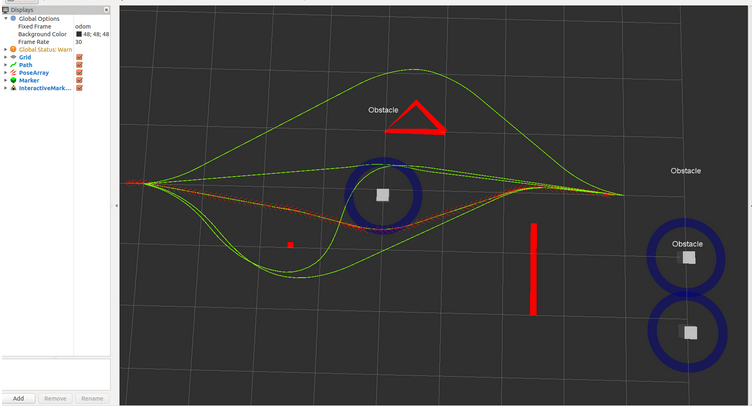
下面的消息类型costmap_converter/ObstacleArrayMsg是costmap_converter包的一部分。说明了以下障碍物的类型:
点状障碍物:提供了单个顶点的几何形状;
圆圈障碍物:提供了单个顶点且非零半径的几何形状;
线障碍物:提供了两个顶点的几何形状;
多边形障碍物:提供了不只2个顶点的多边形;
2.写一个简单的障碍物发不器
创建一个简单的python节点类发不一些障碍物;对于规划部分,会运行test_optim_node节点。如下publish_obstacles.py
#!/usr/bin/env python
import rospy, math
from costmap_converter.msg import ObstacleArrayMsg, ObstacleMsg
from geometry_msgs.msg import PolygonStamped, Point32 def publish_obstacle_msg():
rospy.init_node("test_obstacle_msg") pub = rospy.Publisher('/test_optim_node/obstacles', ObstacleArrayMsg, queue_size=) obstacle_msg = ObstacleArrayMsg()
obstacle_msg.header.stamp = rospy.Time.now()
obstacle_msg.header.frame_id = "odom" # CHANGE HERE: odom/map # Add point obstacle
obstacle_msg.obstacles.append(ObstacleMsg())
obstacle_msg.obstacles[].id =
obstacle_msg.obstacles[].polygon.points = [Point32()]
obstacle_msg.obstacles[].polygon.points[].x = 1.5
obstacle_msg.obstacles[].polygon.points[].y =
obstacle_msg.obstacles[].polygon.points[].z = # Add line obstacle
obstacle_msg.obstacles.append(ObstacleMsg())
obstacle_msg.obstacles[].id =
line_start = Point32()
line_start.x = -2.5
line_start.y = 0.5
line_end = Point32()
line_end.x = -2.5
line_end.y =
obstacle_msg.obstacles[].polygon.points = [line_start, line_end] # Add polygon obstacle
obstacle_msg.obstacles.append(ObstacleMsg())
obstacle_msg.obstacles[].id =
v1 = Point32()
v1.x = -
v1.y = -
v2 = Point32()
v2.x = -0.5
v2.y = -1.5
v3 = Point32()
v3.x =
v3.y = -
obstacle_msg.obstacles[].polygon.points = [v1, v2, v3] r = rospy.Rate() # 10hz
t = 0.0
while not rospy.is_shutdown(): # Vary y component of the point obstacle
obstacle_msg.obstacles[].polygon.points[].y = *math.sin(t)
t = t + 0.1 pub.publish(obstacle_msg) r.sleep() if __name__ == '__main__':
try:
publish_obstacle_msg()
except rospy.ROSInterruptException:
pass
如何运行:
roslaunch teb_local_planner test_optim_node.launch
roslaunch mypublisher publish_obstacles.py
相关参数:
在规划中,与自定义障碍物相关的参数
~<name>/min_obstacle_dist: Desired minimal distance from obstacles ~<name>/include_costmap_obstacles: Deactivate costmap obstacles completely ~<name>/costmap_obstacles_behind_robot_dist: Maximum distance behind the robot searched for occupied costmap cells. ~<name>/obstacle_poses_affected: Specify how many trajectory configurations/poses should be taken into account next to the closest one. ~<name>/weight_obstacle: Optimization weight for keeping a distance to obstacles. ~<name>/footprint_model: The robot footprint model
teb教程7的更多相关文章
- teb教程1
http://wiki.ros.org/teb_local_planner/Tutorials/Setup%20and%20test%20Optimization 简介:本部分关于teb怎样优化轨迹以 ...
- teb教程8
融合动态障碍物 简介:考虑怎样把其他节点发布的动态障碍物考虑进来 1.本部分演示了动态障碍物该如何被包含到teb_local_planner中. 2.写一个简单的动态障碍物的发布器publish_dy ...
- teb教程3
配置和运行机器人导航 简介:配置teb_local_planner作为navigation中local planner的插件 参考teb安装 由于局部代价地图的大小和分辨率对优化性能影响很大,因为占据 ...
- teb教程10 teb questions
http://wiki.ros.org/teb_local_planner/Tutorials/Frequently%20Asked%20Questions
- teb教程9
通过costmap_converter来跟踪和包含动态障碍物 简介:利用costmap_converter来很容易跟踪动态障碍物 1.costmap_converter中提供了一个插件称之为costm ...
- teb教程6
代价地图的转换 简介:本部分关于怎样把代价地图转换插件应用到转换占据栅格costmap2d到几何形状来优化(测试阶段) teb_local_planner包支持costmap_converter插件, ...
- teb教程5
跟随全局规划器 简介:本部分是关于如何配置局部规划器严格跟随全局规划,也包括调节在时优和路径跟随上的权衡. 1.先看一下via-points当前的优化行为:启动下面节点 roslaunch teb_l ...
- teb教程4
障碍物避障以及机器人足迹模型 简介:障碍物避障的实现,以及必要参数的设置对于机器人足迹模型和其对应的影响 1.障碍物避障是怎样工作的 1.1 惩罚项 障碍物避障作为整个路径优化的一部分.显然,优化是找 ...
- teb教程2
http://wiki.ros.org/teb_local_planner/Tutorials/Inspect%20optimization%20feedback 检查优化反馈 简介:怎样检查优化的轨 ...
随机推荐
- mysql -- mysql基于ssl的主从复制
mysql基于ssl的主从复制由于mysql在复制过程中是明文的,所以就大大降低了安全性,因此需要借助于ssl加密来增加其复制的安全性. 主服务器node1:172.16.200.1从服务器node2 ...
- 大哥带我走渗透ii--时间盲注,布尔盲注
5/27 基于布尔的盲注 我连题目都看不懂555,先去补充一点知识.https://blog.csdn.net/weixin_40709439/article/details/81355856 返回的 ...
- shell位置参数的遍历
- Ubuntu14.04搭建Boa服务
1. 下载 boa 源码 : https://sourceforge.net/projects/boa/ 版本:boa-0.94.13.tar.gz 2. 在Ubuntu 下解压进入 [boa-0.0 ...
- Winsock编程原理——面向连接
Winsock编程原理——面向连接 Windows Sockets使用套接字进行编程,套接字编程是面向客户端/服务器模型而设计的,因此系统中需要客户端和服务器两个不同类型的进程,根据连接类型的不同,对 ...
- 【Nginx】缓存配置
1.如何配置基本缓存设置 开启简单的缓存配置,只需要两个指令:proxy_cache_path和proxy_cache.proxy_cache_path配置缓存的存放地址和其他的一些常用配置,prox ...
- 阿里云重磅发布RDS for SQL Server AlwaysOn集群版
2018年双十一刚过,阿里云数据库发布RDS for SQL Server AlwaysOn集群版,这是业界除微软云SQL Database外,首家云计算公司基于SQL Server最新AlwaysO ...
- sigaction函数学习
sigaction(查询或设置信号处理方式) 相关函数 signal,sigprocmask() ,sigpending,sigsuspend, sigemptyset 表头文件 #include&l ...
- hdu 4705 Y (树形dp)
Description Input 4 1 2 1 3 1 4 题目的意思是给你一棵树,让你找到所有不在一条路径上的三个点的情况个数.乍一看正向处理比较麻烦,我们从反方向考虑,如果是取在一条路径上的3 ...
- kubernetes集群中移除Node
例如要在集群中移出node2节点1)在master节点上执行: kubectl drain node2 --delete-local-data --force --ignore-daemonsets ...