29 基于PCL的点云平面分割拟合算法技术路线(针对有噪声的点云数据)
0 引言
最近项目中用到了基于PCL开发的基于平面的点云和CAD模型的配准算法,点云平面提取采用的算法如下。
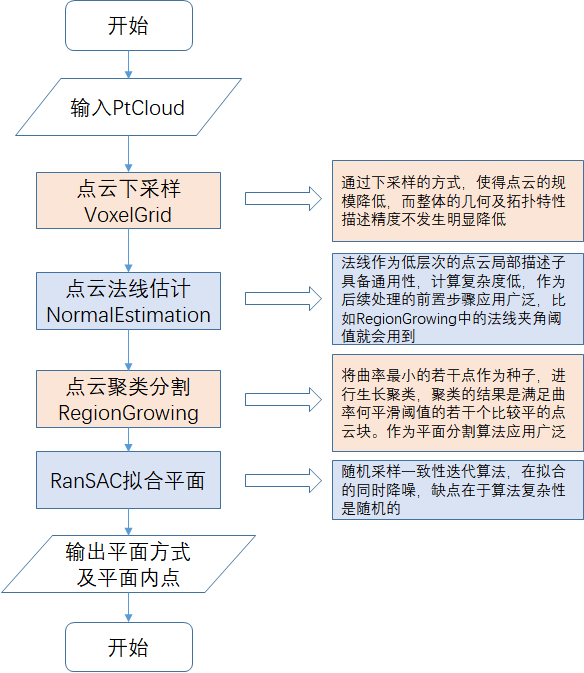
1 基于PCL的点云平面分割拟合算法
2 参数及其意义介绍
(1)点云下采样
1. 参数:leafsize
2. 意义:Voxel Grid的leafsize参数,物理意义是下采样网格的大小,直接影响处理后点云密集程度,并对后期各种算法的处理速度产生直接影响。
3. 值越大,点云密度越低,处理速度越快;值越小,点云密度越高,处理速度越慢。通常保持这个值,使得其他的与点数有关的参数可以比较稳定而不作大的改动。
4. 对应的代码:
PointCloudPtr cloud(new pointCloud);
ParameterReader pd(ParameterFilePath);
double leafsize = stod(pd.getData("leafsize"));
pcl::VoxelGrid<PointT> sor;
sor.setInputCloud(CRTP::cloud_org);
sor.setLeafSize(leafsize, leafsize, leafsize);
sor.filter(*cloud);
(2)点云法线估计
1. 参数:Ksearch
2. 意义:估计法线时邻域内点的个数
3. 值越小,对点云的轮廓描述越精细;值越大,对点云的轮廓描述越粗糙。
4. 对应的代码:
ParameterReader pd(ParameterFilePath);
pcl::NormalEstimation<PointT, pcl::Normal> ne;
pcl::PointCloud<pcl::Normal>::Ptr mynormals(new pcl::PointCloud<pcl::Normal>);
pcl::search::KdTree<PointT>::Ptr tree(new pcl::search::KdTree<PointT>);
tree->setInputCloud(cloud_filter);
ne.setInputCloud(cloud_filter);
ne.setSearchMethod(tree);
ne.setKSearch(stoi(pd.getData("Ksearch")));
ne.compute(*mynormals);
(3)RegionGrowing生长聚类算法对可能是平面的点云进行分割
算法步骤:
1. 算法首先计算所有点的曲率值,并将曲率最小的点作为种子(seeds),开始进行生长
2. 以法线夹角阈值(Angle threshold)作为判断标准,对邻域内的点进行遍历判断 ,符合条件则加入当前点集,不符合则reject,并加入reject点集
3. 以曲率阈值(Curvature threshold)作为判断标准,将邻域内符合条件的点加入到种子队列中
4. 移除当前种子
5. 如果当前种子队列空了,表明当前子区域分割停止,遍历其他种子区域,直到停止整个点云均被遍历完为止生长
参数分析:
1. 参数:MinClusterSize(最小聚类点云数目),MaxClusterSize(最大聚类点云数据)
NumberOfNeighbours(寻找种子seed点最近的点判断是否为同类),SmoothnessThreshold(聚类的法线夹角阈值)
CurvatureThreshold(聚类的曲率阈值,可以直观地将圆柱面等区别开)
2. 对应的代码
ParameterReader pd(ParameterFilePath);
pcl::RegionGrowing<PointT, pcl::Normal> reg;
pcl::search::KdTree<PointT>::Ptr tree(new pcl::search::KdTree<PointT>);
reg.setMinClusterSize(stoi(pd.getData("MinClusterSize")));
reg.setMaxClusterSize(stoi(pd.getData("MaxClusterSize")));
reg.setSearchMethod(tree);
reg.setNumberOfNeighbours(stoi(pd.getData("NumberOfNeighbours")));
reg.setInputCloud(CloudFilter);
reg.setInputNormals(Normals);
reg.setSmoothnessThreshold(stod(pd.getData("SmoothnessThreshold")) / 180.0 * M_PI);
reg.setCurvatureThreshold(stod(pd.getData("CurvatureThreshold")));
std::vector <pcl::PointIndices> clusters;
reg.extract(clusters);
/* wk 添加: 可视化调试 */
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_segmented(new pcl::PointCloud<pcl::PointXYZRGB>());
cloud_segmented = reg.getColoredCloud();
pcl::visualization::CloudViewer viewer("Cluster viewer");
viewer.showCloud(cloud_segmented);
while (!viewer.wasStopped())
{
}
/* wk 添加: 可视化调试 */
(4)SACSegmentation 利用RANSAC算法对平面点云进行分割并拟合
1. 参数:MaxIterations(最大迭代次数),threshold(距离阈值,判断点是否为当前拟合平面的内点,理论上该值越大平面越粗糙)
2. 代码
/*RanSAC拟合平面,并将平面内点分割出来*/ pcl::SACSegmentation<PointT> seg;
pcl::PointIndices::Ptr inliers(new pcl::PointIndices);
pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients);
seg.setOptimizeCoefficients(true);
seg.setModelType(pcl::SACMODEL_PLANE);
seg.setMethodType(pcl::SAC_RANSAC);
seg.setMaxIterations(stoi(pd.getData("Maxci")));
seg.setDistanceThreshold(stod(pd.getData("threshold")));
seg.setInputCloud(cloud);
seg.segment(*inliers, *coefficients); // 分割内点,另存
pcl::ExtractIndices<PointT> extract;
PointCloudPtr cloud_plane(new pointCloud);
extract.setInputCloud(cloud);
extract.setIndices(inliers);
extract.setNegative(false);
extract.filter(*cloud_plane);
3 部分效果图展示
(1)原图

(2)RegionGrowing分割效果图

4 算法的局限性
区域生长算法分割平面步骤及问题分析:针对分辨率低、扫描质量比较差的点云,如图所示,算法无法将破碎、扭曲的大块区域识别为平面区域,只能将这部分点判断为非平面点集舍弃掉。

区域生长算法通常在分割细节处比较平滑的平面点云时,具有相当的优势。但是在处理“波纹”状点云时,就没什么优势了。而实际扫描点云的细节部位很多时候是如上图所示的,为了将曲率较小的曲面区别开,而调低平滑及曲率阈值时,这类从大视角上看明显是平面的点云会被rejected,从而导致分割失效。如下图所示,RegionGrowing更适合处理接近理想点云的这类点云,而不适合处理波动起伏状的、扫描精度较差的点云。

29 基于PCL的点云平面分割拟合算法技术路线(针对有噪声的点云数据)的更多相关文章
- [OpenCV]基于特征匹配的实时平面目标检测算法
一直想基于传统图像匹配方式做一个融合Demo,也算是对上个阶段学习的一个总结. 由此,便采购了一个摄像头,在此基础上做了实时检测平面目标的特征匹配算法. 代码如下: # coding: utf-8 ' ...
- 2d-Lidar 点云多直线拟合算法
具体步骤: EM+GMM(高斯模糊模型) 点云分割聚类算法的实现. 基于RANSAC单帧lidar数据直线拟合算法实现. 多帧lidar数据实时直线优化算法实现. 算法实现逻辑: Struct lin ...
- [转帖]腾讯云TStack获下一代云计算技术创新奖 与鲲鹏等产品实现兼容性测试
http://www.techweb.com.cn/cloud/2019-12-16/2769286.shtml [TechWeb]12 月 16 日消息,在中国电子技术标准化研究院主办的“第九届中国 ...
- 沙龙报名 | 京东云DevOps——自动化运维技术实践
随着互联网技术的发展,越来越多企业开始认识DevOps重要性,在企业内部推进实施DevOps,期望获得更好的软件质量,缩短软件开发生命周期,提高服务稳定性.但在DevOps 的实施与落地的过程中,或多 ...
- 深度学*点云语义分割:CVPR2019论文阅读
深度学*点云语义分割:CVPR2019论文阅读 Point Cloud Oversegmentation with Graph-Structured Deep Metric Learning 摘要 本 ...
- CVPR2020:4D点云语义分割网络(SpSequenceNet)
CVPR2020:4D点云语义分割网络(SpSequenceNet) SpSequenceNet: Semantic Segmentation Network on 4D Point Clouds 论 ...
- Android上掌纹识别第一步:基于OpenCV的6种肤色分割 源码和效果图
Android上掌纹识别第一步:基于OpenCV的6种肤色分割 源码和效果图 分类: OpenCV图像处理2013-02-21 21:35 6459人阅读 评论(8) 收藏 举报 原文链接 ht ...
- PCL点云库:ICP算法
ICP(Iterative Closest Point迭代最近点)算法是一种点集对点集配准方法.在VTK.PCL.MRPT.MeshLab等C++库或软件中都有实现,可以参见维基百科中的ICP Alg ...
- 基于TFS的.net技术路线的云平台DevOps实践
DevOps是近几年非常流行的系统研发管理模式,很多公司都或多或少在践行DevOps.那么,今天就说说特来电云平台在DevOps方面的实践吧. 说DevOps,不得不说DevOps的具体含义.那么,D ...
随机推荐
- 负载均衡环境搭建(nginx和tomcat)
偶然看到博客上一篇负载均衡的文章,学习了一下,此处做下记录 目录 1.环境准备 2.tomcat配置 3.nginx配置 1.环境准备 第一步:java环境 第二步:nginx和pcre源码包 下载链 ...
- C++笔记(2)——一些语法基础知识以及基本算法知识
今天和PAT无直接相关的关系,主要是关于一些语法/算法的笔记,因为我发现自己的基础还没有打扎实,有些时候看别人的代码还会觉得一头雾水,不明白代码的含义. 一些C/C++语法 先从语法开始吧.这部分很琐 ...
- 关于 阿里云 的linux 安装 jdk和tomcat 中的问题(解压版的jdk和tomcat)
一安装jdk 1:首先要申请一个服务器 2:其次官网下载jdk(按你的linux版本下载(我的目前是64)) 3:就是上传jdk 4:在 usr 文件夹下创建 java 文件夹 5:把jdk上传到ja ...
- mssql中quotename的作用
quotename是保证字符原样输入到mssql中 eg: select * from '+QUOTENAME(@tbname) 用于所传字符为mssql保留字样
- Reinforcement Learning Index Page
Reinforcement Learning Posts Step-by-step from Markov Property to Markov Decision Process Markov Dec ...
- dfs(枚举)
http://codeforces.com/gym/100989/problem/L L. Plus or Minus (A) time limit per test 1.0 s memory lim ...
- OpenCV-----Numpy数组
Nunmpy数组包含: 强大的N维数组对象 复杂的(广播)功能 集成C / C ++和Fortran代码的工具 有用的线性代数,傅立叶变换和随机数功能 遍历与修改数组中的所有像素点 #对所有像素进行循 ...
- Window Operations
Window Operations 有点类似于Storm中的State,可以设置窗口的大小和滑动窗口的间隔来动态的获取当前Steaming的允许状态,可以对一段时间的数据进行处理. 如图window ...
- spark复习笔记(3)
在windows上实现wordcount单词统计 一.编写scala程序,引入spark类库,完成wordcount 1.sparkcontextAPI sparkcontext是spark功能的主要 ...
- JavaWeb基础工具类——BaseDao
package dao; import java.sql.Connection; import java.sql.DriverManager; import java.sql.PreparedStat ...