Realsense Camera SDK 开发手记(一)
0x01
第一次使用SDK写代码,有很多不懂的地方,在设备来之前把文档看了一下,大概明白了点,东平西凑大概写了点,但是当把设备连接上去进行测试的时候就出现了各种问题,用RealSenseCamera进行开发的人还比较少,只有论坛上的一些零星的讨论,并且用C#进行开发的人还是占多数,毕竟和Unity3D结合起来还是比较有趣的。文档里写了入门的教程,但是因为和我的使用场景不太一样,其中又有些奇葩的地方,文档里又没有说明,对编程又不是很熟悉,导致到后来才大概猜到了一点,理解了一点,在这里写下来给大家一个参考。
0x02
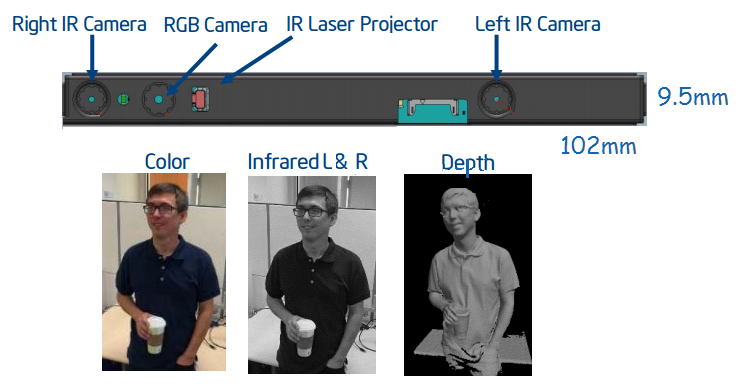
我们这次采用的设备是intel RealSense Camera R200,它有RGB摄像头以及两个IR摄像头,通过与IR Laser Projector的结合可以得到场景的深度信息。SDK中还有很多内置的面部识别和手势识别等函数。但是我们并不需要用到那些,我只想获取它的左右两个红外摄像头采集到的图片。
0x03
首先遇到的问题的就是visual studio 2013配置的问题,本来它很贴心的提供了直接导入Property Sheet一键式的配置,可是我试了两次都失败了,而且传到github上以后发现其他人下载下来就没办法打开我的Solution了(里面出现我的配置文件的具体路径),于是还是进行了手动的配置。其实手动配置也挺好的,下次遇到其他的时候需要配置就可以自己动手了。原来配置opencv的时候就是各种不懂,别人怎么说我就怎么做,虽然最后可以写代码了,但是下次遇到这些问题又要把博客翻出来看看是怎么回事了。
本来按部就班按照他的指导手册一步一步来就可以了,可是各种报错。
Create Session
The SDK core is represented by two interfaces:
- PXCSessionmanages all of the modules of the SDK
- PXCSenseManagerorganizes a pipeline by starting,stopping,and pausing the operations of its varies modalities.
PXCSenseManager *psm=0;
psm = PXCSenseManager::CreateInstance();
if (!psm)
{
wprintf_s(L"Unable to create the PXCSenseManager\n");
return 1;// select the color stream of size 640x480 and depth stream of size 640x480
}
psm->EnableStream(PXCCapture::STREAM_TYPE_LEFT, 640, 480);
psm->EnableStream(PXCCapture::STREAM_TYPE_RIGHT, 640, 480);
psm -> Init()
}
然后初始化的时候就报错了,前面的配置没有问题。我就看了一下它的例子,然后把其中一段拷贝了出来
// Select the color and depth streams
PXCVideoModule::DataDesc ddesc={};
ddesc.deviceInfo.streams=PXCCapture::STREAM_TYPE_RIGHT |PXCCapture::STREAM_TYPE_LEFT;
sm->EnableStreams(&ddesc);
然后初始化没有问题,我当时就可想不通为什么这么来就行,用EnableStream就是不行呢,明明官方文档里没有提到这个问题啊。各种不理解,困惑了很长世间,导致我下面也没办法写下去。
0x04
后来在论坛里看到了这段代码
// Get the raw 16bit data from the infrared image
PXCMImage.ImageData irImageData;
irImageSource.AcquireAccess(PXCMImage.Access.ACCESS_READ,PXCMImage.PixelFormat.PIXEL_FORMAT_Y16,out irImageData);
irImageData.ToUShortArray(0, irData);
// despite the ir camera being 628 pixels wide, the raw bytes are stored with a "pitch" of 640
// in the case of 16bit data, the pitch is returned as 1280
int pitch = irImageData.pitches[0]/2;
int width = irImageSource.info.width;
int height = irImageSource.info.height;
for(int y = 0; y < height; y++){
for(int x = 0; x < width; x++){
int iA = (height-y-1) * pitch + x;
int iB = (y * width + x) * 4;
byte intensity = (byte)(irData[iA]/4);// raw pixels range between 0-1024
imgData[iB] = intensity;
imgData[iB+1] = intensity;
imgData[iB+2] = intensity;
imgData[iB+3] = 255; // Alpha
}
}
仔细琢磨了以后我发现自己对于PXCMImage::ImageData里面的piches和panels并不理解。重新看了文档以后我的理解是这样的:PXCMImage::ImageData里面存储的数据是在内存的某段空间,这段空间的首地址(类似于数组名)就放在panels[0]里。而piches(间距)表示的则是这段内存空间的宽度。
但是还是不明白,为什么我上面的初始化会失败。我们后来还曾经尝试过用Github上面的一段代码把读取到的图像中的信息放到cv::Mat的格式里(长和宽设置为640×480)。它会提示超出了内存范围。尝试了各种断点之后发现,设备的信息返回的图像的大小是很诡异的628×468,当把图像大小设置为这个数字的时候按照教程来就不会出现无法初始化的问题了,看来问题出在这个图像的大小上。
于是搜索了一下SDK的文档,关于红外成像的大小的,发现是这样的

返回的并没有640×480这个选项。到这里就恍然大悟了。
首先为什么初始化失败:我把图像的大小设置成了640×480,虽然能够启动数据流,但是初始化就出问题了,而后面提到的那种设置方式是采用了默认的大小。
第二,为什么后面会出现超出内存空间的错误,是因为虽然他的piches是640,但是在红外的情况下,实际上只在前面的628位上存储有图像的数据,后面的索引自然是失效的。但是如果要把图像的信息传输完全就要把循环结构中的int iA = (height-y-1) * pitch + x;使用pich而不是628。
0x05
写了这么几段,也不知道有没有把问题说清楚,第一次写这样子的所谓技术博客还是没什么经验,但是我相信会越写越好的,下次用_visio_画图把问题说的更清楚。
Realsense Camera SDK 开发手记(一)的更多相关文章
- Kinect for Windows SDK开发入门(一):开发环境配置
[译]Kinect for Windows SDK开发入门(一):开发环境配置 前几天无意中看到微软发布了Kinect for windows sensor,进去看了一下Kinect应用的例子,发现K ...
- Kinect for Windows SDK开发入门(15):进阶指引 下
Kinect for Windows SDK开发入门(十五):进阶指引 下 上一篇文章介绍了Kinect for Windows SDK进阶开发需要了解的一些内容,包括影像处理Coding4Fun K ...
- 【转】Android Camera 相机开发详解
在Android 5.0(SDK 21)中,Google使用Camera2替代了Camera接口.Camera2在接口和架构上做了巨大的变动, 但是基于众所周知的原因,我们还必须基于 Android ...
- 《Android原生整合虹软SDK开发uniapp插件》
1.项目背景 应公司要求,需要开发一套类似人脸打卡功能的app,但是因为我们公司没有很强的原生android开发者,所以根据现状选择了第三方跨平台的uniapp,想必目前大多人都了解这个平台了,我也就 ...
- Kinect for Windows SDK开发学习相关资源
Kinect for Windows SDK(K4W)将Kinect的体感操作带到了平常的应用学习中,提供了一种不同于传统的鼠标,键盘及触摸的无接触的交互方式,在某种程度上实现了自然交互界面的理想,即 ...
- 微信公众账号 Senparc.Weixin.MP SDK 开发教程 索引
Senparc.Weixin.MP SDK从一开始就坚持开源的状态,这个过程中得到了许多朋友的认可和支持. 目前SDK已经达到比较稳定的版本,这个过程中我觉得有必要整理一些思路和经验,和大家一起分享. ...
- 高拍仪拍照SDK开发(良田影像S300L|S500L)
高拍仪拍照SDK开发下载地址:点击下载 本SDK适用于:良田影像S300L|S500L 高拍仪如图: SDN开发包安装之后找到安装目录,如图: 大家找到各自需要的版本即可,需要注意的是如果需要上传图片 ...
- TortoiseSVN安装以及淘宝 TAE SDK 开发环境的搭建
一.TortoiseSVN 的下载和安装 1.进入TortoiseSVN 官网下载地址http://tortoisesvn.net/downloads.html,根据自己的操作系统位数下载相应最新版本 ...
- SDK开发断点失效
做SDK开发,一般会创建一个静态库工程,然后添加一个app的Target 可是,Xcode7创建的工程,app的Target中断点有效,能断住,为什么静态库的Target中的断点断不住呀. 断点断住发 ...
随机推荐
- MFC 数据库编程 增删改查的一个例子
1.先看下效果图: 主界面: 一个最简单的1对多的表,一张Article(文章)表,一张Category(类别)表.有添加,修改,删除文章按钮.点击类别编辑按钮就会跳到第二个对话框.点击数据库配置就会 ...
- Sublime Text快捷键:
Ctrl+Shift+P:打开命令面板 Ctrl+P:搜索项目中的文件 Ctrl+G:跳转到第几行 Ctrl+W:关闭当前打开文件 Ctrl+Shift+W:关闭所有打开文件 Ctrl+Shift+V ...
- Linux下逻辑卷创建与管理
用虚拟机加一块硬盘后,查看硬盘状况,使用fdisk-l命令: [root@jerrybj ~]# fdisk -l Disk /dev/sda: 21.4 GB, 21474836480 bytes ...
- js 调用父窗口的方法
opener.show(); 父窗体需要顶一个show() 方法 父面页代码: <!DOCTYPE HTML PUBLIC "-//IETF//DTD LEVEL1//EN" ...
- 最近学习了下BI(商业智能)做报表
最近公司购买了Style intelligence 出的BI报表工具,接触新的东西不是很容易上手,这个东西是别的项目组用的,我们项目组由于进度比较快就让我先到他们项目组帮他们,为了使用这个东西,他们已 ...
- 结构-行为-样式-Js排序算法之 直接插入排序
最新因工作原因需要接触到算法,之前学习C++的时候有接触过算法,Javascript中实现算法其实也是大同小异.下面我讲下第一个实现的排序算法--直接插入排序.基本实现思路:假定一个数组中前n(n&g ...
- 蓝桥杯 C语言 入门训练 序列求和
问题描述 求1+2+3+...+n的值. 输入格式 输入包括一个整数n. 输出格式 输出一行,包括一个整数,表示1+2+3+...+n的值. 样例输入 4 样例输出 10 样例输入 100 说明:有一 ...
- 蓝桥杯 C语言 基础训练 数列排序
问题描述 给定一个长度为n的数列,将这个数列按从小到大的顺序排列.1<=n<=200 输入格式 第一行为一个整数n. 第二行包含n个整数,为待排序的数,每个整数的绝对值小于10000. 输 ...
- Can’t connect to local MySQL server through socket ‘/var/lib/mysql/mysql.sock’ (2)的解决方法
在连接数据库时,报这个错误,是/var/lib/mysql/ 目录下没有mysql.sock文件,在服务器搜索myslq.sock文件,我的是在/tmp/mysql.sock 解决方法是加一个软链: ...
- Jdon框架开发指南
Jdon框架快速开发指南 开发主要步骤如下: JdonFramework6.0以上两步开发见这里. 快速配置指南 新增/查询/修改/删除(CRUD); 批量查询和分页显示 本文Step By Step ...