OpenCvSharp 通过特征点匹配图片
现在的手游基本都是重复操作,一个动作要等好久,结束之后继续另一个动作.很麻烦,所以动起了自己写一个游戏辅助的心思.
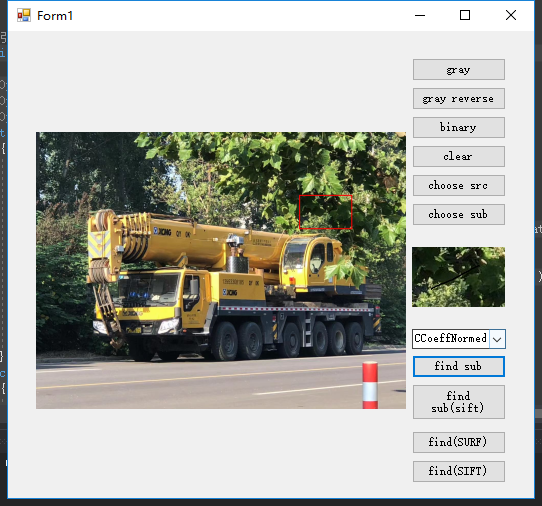
这个辅助本身没什么难度,就是通过不断的截图,然后从这个截图中找出预先截好的能代表相应动作的按钮或者触发条件的小图.
找到之后获取该子区域的左上角坐标,然后通过windows API调用鼠标或者键盘做操作就行了.
这里面最难的也就是找图了,因为要精准找图,而且最好能适应不同的分辨率下找图,所以在模板匹配的基础上,就有了SIFT和SURF的特征点找图方式.
在写的过程中查找资料,大都是C++ 或者python的, 很少有原生的C#实现, 所以我就直接拿来翻译过来了(稍作改动).
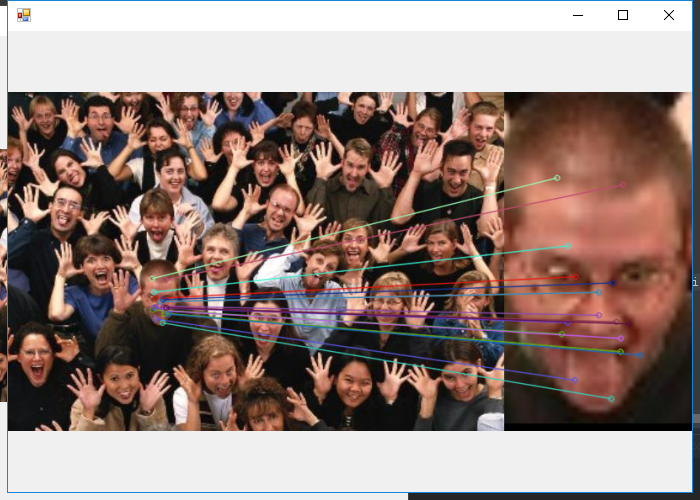
SIFT算法
public static Bitmap MatchPicBySift(Bitmap imgSrc, Bitmap imgSub)
{
using (Mat matSrc = imgSrc.ToMat())
using (Mat matTo = imgSub.ToMat())
using (Mat matSrcRet = new Mat())
using (Mat matToRet = new Mat())
{
KeyPoint[] keyPointsSrc, keyPointsTo;
using (var sift = OpenCvSharp.XFeatures2D.SIFT.Create())
{
sift.DetectAndCompute(matSrc, null, out keyPointsSrc, matSrcRet);
sift.DetectAndCompute(matTo, null, out keyPointsTo, matToRet);
}
using (var bfMatcher = new OpenCvSharp.BFMatcher())
{
var matches = bfMatcher.KnnMatch(matSrcRet, matToRet, k: ); var pointsSrc = new List<Point2f>();
var pointsDst = new List<Point2f>();
var goodMatches = new List<DMatch>();
foreach (DMatch[] items in matches.Where(x => x.Length > ))
{
if (items[].Distance < 0.5 * items[].Distance)
{
pointsSrc.Add(keyPointsSrc[items[].QueryIdx].Pt);
pointsDst.Add(keyPointsTo[items[].TrainIdx].Pt);
goodMatches.Add(items[]);
Console.WriteLine($"{keyPointsSrc[items[0].QueryIdx].Pt.X}, {keyPointsSrc[items[0].QueryIdx].Pt.Y}");
}
} var outMat = new Mat(); // 算法RANSAC对匹配的结果做过滤
var pSrc = pointsSrc.ConvertAll(Point2fToPoint2d);
var pDst = pointsDst.ConvertAll(Point2fToPoint2d);
var outMask = new Mat();
// 如果原始的匹配结果为空, 则跳过过滤步骤
if (pSrc.Count > && pDst.Count > )
Cv2.FindHomography(pSrc, pDst, HomographyMethods.Ransac, mask: outMask);
// 如果通过RANSAC处理后的匹配点大于10个,才应用过滤. 否则使用原始的匹配点结果(匹配点过少的时候通过RANSAC处理后,可能会得到0个匹配点的结果).
if (outMask.Rows > )
{
byte[] maskBytes = new byte[outMask.Rows * outMask.Cols];
outMask.GetArray(, , maskBytes);
Cv2.DrawMatches(matSrc, keyPointsSrc, matTo, keyPointsTo, goodMatches, outMat, matchesMask: maskBytes, flags: DrawMatchesFlags.NotDrawSinglePoints);
}
else
Cv2.DrawMatches(matSrc, keyPointsSrc, matTo, keyPointsTo, goodMatches, outMat, flags: DrawMatchesFlags.NotDrawSinglePoints);
return OpenCvSharp.Extensions.BitmapConverter.ToBitmap(outMat);
}
}
}
SURF算法
public static Bitmap MatchPicBySurf(Bitmap imgSrc, Bitmap imgSub, double threshold = )
{
using (Mat matSrc = imgSrc.ToMat())
using (Mat matTo = imgSub.ToMat())
using (Mat matSrcRet = new Mat())
using (Mat matToRet = new Mat())
{
KeyPoint[] keyPointsSrc, keyPointsTo;
using (var surf = OpenCvSharp.XFeatures2D.SURF.Create(threshold,,,true,true))
{
surf.DetectAndCompute(matSrc, null, out keyPointsSrc, matSrcRet);
surf.DetectAndCompute(matTo, null, out keyPointsTo, matToRet);
} using (var flnMatcher = new OpenCvSharp.FlannBasedMatcher())
{
var matches = flnMatcher.Match(matSrcRet, matToRet);
//求最小最大距离
double minDistance = ;//反向逼近
double maxDistance = ;
for (int i = ; i < matSrcRet.Rows; i++)
{
double distance = matches[i].Distance;
if (distance > maxDistance)
{
maxDistance = distance;
}
if (distance < minDistance)
{
minDistance = distance;
}
}
Console.WriteLine($"max distance : {maxDistance}");
Console.WriteLine($"min distance : {minDistance}"); var pointsSrc = new List<Point2f>();
var pointsDst = new List<Point2f>();
//筛选较好的匹配点
var goodMatches = new List<DMatch>();
for (int i = ; i < matSrcRet.Rows; i++)
{
double distance = matches[i].Distance;
if (distance < Math.Max(minDistance * , 0.02))
{
pointsSrc.Add(keyPointsSrc[matches[i].QueryIdx].Pt);
pointsDst.Add(keyPointsTo[matches[i].TrainIdx].Pt);
//距离小于范围的压入新的DMatch
goodMatches.Add(matches[i]);
}
} var outMat = new Mat(); // 算法RANSAC对匹配的结果做过滤
var pSrc = pointsSrc.ConvertAll(Point2fToPoint2d);
var pDst = pointsDst.ConvertAll(Point2fToPoint2d);
var outMask = new Mat();
// 如果原始的匹配结果为空, 则跳过过滤步骤
if (pSrc.Count > && pDst.Count > )
Cv2.FindHomography(pSrc, pDst, HomographyMethods.Ransac, mask: outMask);
// 如果通过RANSAC处理后的匹配点大于10个,才应用过滤. 否则使用原始的匹配点结果(匹配点过少的时候通过RANSAC处理后,可能会得到0个匹配点的结果).
if (outMask.Rows > )
{
byte[] maskBytes = new byte[outMask.Rows * outMask.Cols];
outMask.GetArray(, , maskBytes);
Cv2.DrawMatches(matSrc, keyPointsSrc, matTo, keyPointsTo, goodMatches, outMat, matchesMask: maskBytes, flags: DrawMatchesFlags.NotDrawSinglePoints);
}
else
Cv2.DrawMatches(matSrc, keyPointsSrc, matTo, keyPointsTo, goodMatches, outMat, flags: DrawMatchesFlags.NotDrawSinglePoints);
return OpenCvSharp.Extensions.BitmapConverter.ToBitmap(outMat);
}
}
}
模板匹配
public static System.Drawing.Point FindPicFromImage(Bitmap imgSrc, Bitmap imgSub, double threshold = 0.9)
{
OpenCvSharp.Mat srcMat = null;
OpenCvSharp.Mat dstMat = null;
OpenCvSharp.OutputArray outArray = null;
try
{
srcMat = imgSrc.ToMat();
dstMat = imgSub.ToMat();
outArray = OpenCvSharp.OutputArray.Create(srcMat); OpenCvSharp.Cv2.MatchTemplate(srcMat, dstMat, outArray, Common.templateMatchModes);
double minValue, maxValue;
OpenCvSharp.Point location, point;
OpenCvSharp.Cv2.MinMaxLoc(OpenCvSharp.InputArray.Create(outArray.GetMat()), out minValue, out maxValue, out location, out point);
Console.WriteLine(maxValue);
if (maxValue >= threshold)
return new System.Drawing.Point(point.X, point.Y);
return System.Drawing.Point.Empty;
}
catch(Exception ex)
{
return System.Drawing.Point.Empty;
}
finally
{
if (srcMat != null)
srcMat.Dispose();
if (dstMat != null)
dstMat.Dispose();
if (outArray != null)
outArray.Dispose();
}
}
OpenCvSharp 通过特征点匹配图片的更多相关文章
- sift、surf、orb 特征提取及最优特征点匹配
目录 sift sift特征简介 sift特征提取步骤 surf surf特征简介 surf特征提取步骤 orb orb特征简介 orb特征提取算法 代码实现 特征提取 特征匹配 附录 sift si ...
- aforge通过角点匹配图片相似度
我不知道什么原因,人品不好还是啥的 ExhaustiveTemplateMatching这个类无法高精确度的匹配图片 ........... 换一种方式,就好得多 /// <summary> ...
- OpenCV使用FLANN进行特征点匹配
使用FLANN进行特征点匹配 目标 在本教程中我们将涉及以下内容: 使用 FlannBasedMatcher 接口以及函数 FLANN 实现快速高效匹配( 快速最近邻逼近搜索函数库(Fast Appr ...
- opencv 增强现实(二):特征点匹配
import cv2 as cv import numpy as np # def draw_keypoints(img, keypoints): # for kp in keypoints: # x ...
- 第二篇 特征点匹配以及openvslam中的相关实现详解
配置文件 在进入正题之前先做一些铺垫,在openvslam中,配置文件是必须要正确的以.yaml格式提供,通常需要指明使用的相机模型,ORB特征检测参数,跟踪参数等. #==============# ...
- (2)特征点匹配,并求旋转矩阵R和位移向量t
include头文件中有slamBase.h # pragma once // 各种头文件 // C++标准库 #include <fstream> #include <vector ...
- 图像特征点匹配C代码
#include "opencv2/core/core.hpp" #include "highgui.h" #include "opencv2/img ...
- [OpenCV]DMatch类和KeyPoints类:特征点匹配
DMatch struct CV_EXPORTS_W_SIMPLE DMatch { CV_WRAP DMatch() : queryIdx(-), trainIdx(-), imgIdx(-), d ...
- opencv surf特征点匹配拼接源码
http://blog.csdn.net/huixingshao/article/details/42672073 /** * @file SURF_Homography * @brief SURF ...
随机推荐
- Python基础总结之第五天开始【认识简单的条件语句,也可以叫判断语句】(新手可相互督促)
周五更新很累... 坚持,年薪20万又进了一步~~ python中的条件语句以[ if ]开头,条件语句成立时,运行该代码块,如果条件不成立,则跳过该代码块,执行后面的代码块. 简单的小示例: 输入性 ...
- C#托盘程序设置
打开Microsoft Visual Studio 2010,新建解决方案--添加项目--托盘的实现 从工具栏里,把NotifyIcon控件拖到窗体上,并设置属性: 1.visible 设置默 ...
- python 接口测试环境准备
1.之前用python做appium测试,今天想要尝试下做接口测试 发现在pycharm下,import requests总是报错 : no model named requests 联想到应该是没 ...
- java中System.out.println()打印输出结果
疑点:syso()是打印输出语句,打印的是什么? syso()不同情况下打印输出的结果不一样: 1. package com.briup; public class Syso { public sta ...
- 树莓派 + Windows IoT Core 搭建环境监控系统
前言:Windows IoT 是微软为嵌入式开发板设计的一种物联网操作系统,运行Windows UWP(C# 开发),可以设计出丰富的交互界面,驱动GPIO,连接一些传感器做有意思的事,本文详细介绍如 ...
- 改 Anaconda Jupyter Notebook 开发文件保存目录
1.打开cmd,输入命令找到配置文件路径 jupyter notebook --generate-config 2.打开 jupyter_notebook_config.py 修改配置 c.Noteb ...
- DIY cnblog——背景渐变切换
进来的小伙伴应该已经看过了我的博客样式,但还是贴张图先: 先大致说一下实现的思路,然后把代码贴出来供小伙伴们参考. 由于不是特别技术性的文章,格式就放宽松一点,跟着意识流走吧. 先跟大家分享一个渐变背 ...
- SAP-批量删除生产订单
1.SE38运行:PPARCHP1 2.先用COOIS导出订单,已经CLSD,没有删除的
- php cmd命令行 导入 与备份
- 《大牛到底是如何阅读JDK源码的?》一起来学习一下
前言: 如何阅读源码,是每个程序员需要面临的一项挑战,为什么需要阅读源码?从实用性的角度来看,主要有三个目的: 第一,解决手头的新问题或者新需求; 第二,真正理解一部分理论的落地实现; 第三,应对面试 ...