OpenCvSharp 通过特征点匹配图片
现在的手游基本都是重复操作,一个动作要等好久,结束之后继续另一个动作.很麻烦,所以动起了自己写一个游戏辅助的心思.
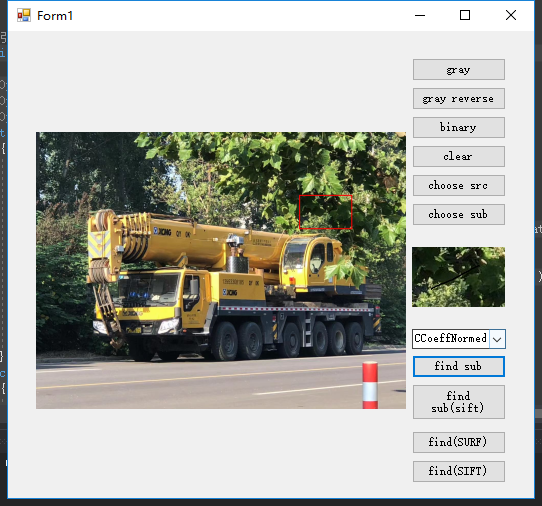
这个辅助本身没什么难度,就是通过不断的截图,然后从这个截图中找出预先截好的能代表相应动作的按钮或者触发条件的小图.
找到之后获取该子区域的左上角坐标,然后通过windows API调用鼠标或者键盘做操作就行了.
这里面最难的也就是找图了,因为要精准找图,而且最好能适应不同的分辨率下找图,所以在模板匹配的基础上,就有了SIFT和SURF的特征点找图方式.
在写的过程中查找资料,大都是C++ 或者python的, 很少有原生的C#实现, 所以我就直接拿来翻译过来了(稍作改动).
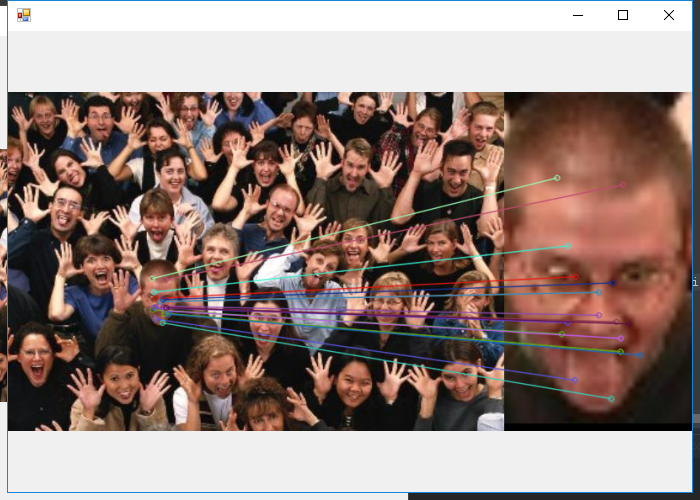
SIFT算法
public static Bitmap MatchPicBySift(Bitmap imgSrc, Bitmap imgSub)
{
using (Mat matSrc = imgSrc.ToMat())
using (Mat matTo = imgSub.ToMat())
using (Mat matSrcRet = new Mat())
using (Mat matToRet = new Mat())
{
KeyPoint[] keyPointsSrc, keyPointsTo;
using (var sift = OpenCvSharp.XFeatures2D.SIFT.Create())
{
sift.DetectAndCompute(matSrc, null, out keyPointsSrc, matSrcRet);
sift.DetectAndCompute(matTo, null, out keyPointsTo, matToRet);
}
using (var bfMatcher = new OpenCvSharp.BFMatcher())
{
var matches = bfMatcher.KnnMatch(matSrcRet, matToRet, k: ); var pointsSrc = new List<Point2f>();
var pointsDst = new List<Point2f>();
var goodMatches = new List<DMatch>();
foreach (DMatch[] items in matches.Where(x => x.Length > ))
{
if (items[].Distance < 0.5 * items[].Distance)
{
pointsSrc.Add(keyPointsSrc[items[].QueryIdx].Pt);
pointsDst.Add(keyPointsTo[items[].TrainIdx].Pt);
goodMatches.Add(items[]);
Console.WriteLine($"{keyPointsSrc[items[0].QueryIdx].Pt.X}, {keyPointsSrc[items[0].QueryIdx].Pt.Y}");
}
} var outMat = new Mat(); // 算法RANSAC对匹配的结果做过滤
var pSrc = pointsSrc.ConvertAll(Point2fToPoint2d);
var pDst = pointsDst.ConvertAll(Point2fToPoint2d);
var outMask = new Mat();
// 如果原始的匹配结果为空, 则跳过过滤步骤
if (pSrc.Count > && pDst.Count > )
Cv2.FindHomography(pSrc, pDst, HomographyMethods.Ransac, mask: outMask);
// 如果通过RANSAC处理后的匹配点大于10个,才应用过滤. 否则使用原始的匹配点结果(匹配点过少的时候通过RANSAC处理后,可能会得到0个匹配点的结果).
if (outMask.Rows > )
{
byte[] maskBytes = new byte[outMask.Rows * outMask.Cols];
outMask.GetArray(, , maskBytes);
Cv2.DrawMatches(matSrc, keyPointsSrc, matTo, keyPointsTo, goodMatches, outMat, matchesMask: maskBytes, flags: DrawMatchesFlags.NotDrawSinglePoints);
}
else
Cv2.DrawMatches(matSrc, keyPointsSrc, matTo, keyPointsTo, goodMatches, outMat, flags: DrawMatchesFlags.NotDrawSinglePoints);
return OpenCvSharp.Extensions.BitmapConverter.ToBitmap(outMat);
}
}
}
SURF算法
public static Bitmap MatchPicBySurf(Bitmap imgSrc, Bitmap imgSub, double threshold = )
{
using (Mat matSrc = imgSrc.ToMat())
using (Mat matTo = imgSub.ToMat())
using (Mat matSrcRet = new Mat())
using (Mat matToRet = new Mat())
{
KeyPoint[] keyPointsSrc, keyPointsTo;
using (var surf = OpenCvSharp.XFeatures2D.SURF.Create(threshold,,,true,true))
{
surf.DetectAndCompute(matSrc, null, out keyPointsSrc, matSrcRet);
surf.DetectAndCompute(matTo, null, out keyPointsTo, matToRet);
} using (var flnMatcher = new OpenCvSharp.FlannBasedMatcher())
{
var matches = flnMatcher.Match(matSrcRet, matToRet);
//求最小最大距离
double minDistance = ;//反向逼近
double maxDistance = ;
for (int i = ; i < matSrcRet.Rows; i++)
{
double distance = matches[i].Distance;
if (distance > maxDistance)
{
maxDistance = distance;
}
if (distance < minDistance)
{
minDistance = distance;
}
}
Console.WriteLine($"max distance : {maxDistance}");
Console.WriteLine($"min distance : {minDistance}"); var pointsSrc = new List<Point2f>();
var pointsDst = new List<Point2f>();
//筛选较好的匹配点
var goodMatches = new List<DMatch>();
for (int i = ; i < matSrcRet.Rows; i++)
{
double distance = matches[i].Distance;
if (distance < Math.Max(minDistance * , 0.02))
{
pointsSrc.Add(keyPointsSrc[matches[i].QueryIdx].Pt);
pointsDst.Add(keyPointsTo[matches[i].TrainIdx].Pt);
//距离小于范围的压入新的DMatch
goodMatches.Add(matches[i]);
}
} var outMat = new Mat(); // 算法RANSAC对匹配的结果做过滤
var pSrc = pointsSrc.ConvertAll(Point2fToPoint2d);
var pDst = pointsDst.ConvertAll(Point2fToPoint2d);
var outMask = new Mat();
// 如果原始的匹配结果为空, 则跳过过滤步骤
if (pSrc.Count > && pDst.Count > )
Cv2.FindHomography(pSrc, pDst, HomographyMethods.Ransac, mask: outMask);
// 如果通过RANSAC处理后的匹配点大于10个,才应用过滤. 否则使用原始的匹配点结果(匹配点过少的时候通过RANSAC处理后,可能会得到0个匹配点的结果).
if (outMask.Rows > )
{
byte[] maskBytes = new byte[outMask.Rows * outMask.Cols];
outMask.GetArray(, , maskBytes);
Cv2.DrawMatches(matSrc, keyPointsSrc, matTo, keyPointsTo, goodMatches, outMat, matchesMask: maskBytes, flags: DrawMatchesFlags.NotDrawSinglePoints);
}
else
Cv2.DrawMatches(matSrc, keyPointsSrc, matTo, keyPointsTo, goodMatches, outMat, flags: DrawMatchesFlags.NotDrawSinglePoints);
return OpenCvSharp.Extensions.BitmapConverter.ToBitmap(outMat);
}
}
}
模板匹配
public static System.Drawing.Point FindPicFromImage(Bitmap imgSrc, Bitmap imgSub, double threshold = 0.9)
{
OpenCvSharp.Mat srcMat = null;
OpenCvSharp.Mat dstMat = null;
OpenCvSharp.OutputArray outArray = null;
try
{
srcMat = imgSrc.ToMat();
dstMat = imgSub.ToMat();
outArray = OpenCvSharp.OutputArray.Create(srcMat); OpenCvSharp.Cv2.MatchTemplate(srcMat, dstMat, outArray, Common.templateMatchModes);
double minValue, maxValue;
OpenCvSharp.Point location, point;
OpenCvSharp.Cv2.MinMaxLoc(OpenCvSharp.InputArray.Create(outArray.GetMat()), out minValue, out maxValue, out location, out point);
Console.WriteLine(maxValue);
if (maxValue >= threshold)
return new System.Drawing.Point(point.X, point.Y);
return System.Drawing.Point.Empty;
}
catch(Exception ex)
{
return System.Drawing.Point.Empty;
}
finally
{
if (srcMat != null)
srcMat.Dispose();
if (dstMat != null)
dstMat.Dispose();
if (outArray != null)
outArray.Dispose();
}
}
OpenCvSharp 通过特征点匹配图片的更多相关文章
- sift、surf、orb 特征提取及最优特征点匹配
目录 sift sift特征简介 sift特征提取步骤 surf surf特征简介 surf特征提取步骤 orb orb特征简介 orb特征提取算法 代码实现 特征提取 特征匹配 附录 sift si ...
- aforge通过角点匹配图片相似度
我不知道什么原因,人品不好还是啥的 ExhaustiveTemplateMatching这个类无法高精确度的匹配图片 ........... 换一种方式,就好得多 /// <summary> ...
- OpenCV使用FLANN进行特征点匹配
使用FLANN进行特征点匹配 目标 在本教程中我们将涉及以下内容: 使用 FlannBasedMatcher 接口以及函数 FLANN 实现快速高效匹配( 快速最近邻逼近搜索函数库(Fast Appr ...
- opencv 增强现实(二):特征点匹配
import cv2 as cv import numpy as np # def draw_keypoints(img, keypoints): # for kp in keypoints: # x ...
- 第二篇 特征点匹配以及openvslam中的相关实现详解
配置文件 在进入正题之前先做一些铺垫,在openvslam中,配置文件是必须要正确的以.yaml格式提供,通常需要指明使用的相机模型,ORB特征检测参数,跟踪参数等. #==============# ...
- (2)特征点匹配,并求旋转矩阵R和位移向量t
include头文件中有slamBase.h # pragma once // 各种头文件 // C++标准库 #include <fstream> #include <vector ...
- 图像特征点匹配C代码
#include "opencv2/core/core.hpp" #include "highgui.h" #include "opencv2/img ...
- [OpenCV]DMatch类和KeyPoints类:特征点匹配
DMatch struct CV_EXPORTS_W_SIMPLE DMatch { CV_WRAP DMatch() : queryIdx(-), trainIdx(-), imgIdx(-), d ...
- opencv surf特征点匹配拼接源码
http://blog.csdn.net/huixingshao/article/details/42672073 /** * @file SURF_Homography * @brief SURF ...
随机推荐
- 优化 Ubuntu
优化Ubuntu 1. 更换 apt 源 echo 'deb http://mirrors.aliyun.com/ubuntu/ bionic main restricted universe mul ...
- spark 源码分析之六--Spark RPC剖析之Dispatcher和Inbox、Outbox剖析
在上篇 spark 源码分析之五 -- Spark内置RPC机制剖析之一创建NettyRPCEnv 中,涉及到了Diapatcher 内容,未做过多的剖析.本篇来剖析一下它的工作原理. Dispatc ...
- 在eclipse中创建Web项目中没有web.xml的解决方法
右键点击项目 → “Java EE Tool” → “Generate Deployment descriptor stub” 即可生成web.xml文件
- Ubuntu下Mongo的安装和笔记
在linux下的安装 打开https://www.mongodb.com/download-center#community选择linux然后选择自己的Version复制DOWNLOAD旁边的链接 打 ...
- Ping、Traceroute工作原理
在工作开发过程中,我们经常会使用到ping和traceroute.在这里,我们将细述其工作原理,让你在会用的基础之上理解其内部工作过程. ICMP应用实例--Ping Ping 是 ICMP 的一个重 ...
- windows下hexo+github搭建个人博客
网上利用hexo搭建博客的教程非常多,大部分内容都大同小异,选择一篇合适的参考,跟着一步一步来即可. 但是,很多博客由于发布时间较为久远等问题,其中某些操作在现在已不再适用,从而导致类似于我这样的小白 ...
- Java代码计算运行时间
突然想准确的测试一下Java代码的执行时间,在网上找了一会.发现基本有以下两种方法:第一种是以毫秒为单位计算的. Java代码 //伪代码 long startTime=System.currentT ...
- 夯实Java基础(十)——抽象类和接口
转载自:http://cmsblogs.com/ 该博主的网站上干货非常!非常!非常多(说三遍),强烈推荐大家前去学习. 接口和内部类为我们提供了一种将接口与实现分离的更加结构化的方法 抽象类与接口是 ...
- java并发编程(二十六)----ThreadLocal的使用
其实ThreadLocal很多接触过多线程的同学都可能会很陌生,他不像current包里面那些耳熟能详的api一样在我们面前经常出现,更多的他作为一个本地类出现在系统设计里面.我们可以说一下Sprin ...
- bottombar——Fragment
首先是依赖 compile 'com.hjm:BottomTabBar:1.1.1' 下面是activity.xml文件 <RelativeLayout xmlns:android=&quo ...