用线性单元(LinearUnit)实现工资预测的Python3代码
功能:通过样本进行训练,让线性单元自己找到(这就是所谓机器学习)工资计算的规律,然后用两组数据进行测试机器是否真的get到了其中的规律。
原文链接在文尾,文章中的代码为了演示起见,仅根据工作年限来预测工资,参数是一维的,最后绘制的图也是平面图。本着学习的态度,我将代码改为能根据两个参数来预测工资,两个参数分别是工作年限和级别,并且用3D图绘制出拟合的效果。原作者的代码是适用于Python2.7的,我的代码适用于Python3,谨供参考。
注意:绘图代码需要安装matplotlib。
代码:
#!/usr/bin/env python
# -*- coding: UTF-8 -*- from Perceptron import Perceptron #定义激活函数f
f = lambda x: x class LinearUnit(Perceptron):
def __init__(self, input_num):
'''初始化线性单元,设置输入参数的个数'''
Perceptron.__init__(self, input_num, f) def get_training_dataset():
'''
捏造5个人的收入数据
'''
# 构建训练数据
# 输入向量列表,每一项的第一个是工作年限,第二个是级别
# 构造这些数据所用的公式是:工资=1000*年限 + 500*级别,看机器是否能猜出来
input_vecs = [[5,1], [3, 7], [8,2], [1.5,5], [10,6]]
# 期望的输出列表,月薪,注意要与输入一一对应。【注意! 我故意让结果不太准确,这也会导致预测的结果有偏差】
labels = [5200, 6700, 9300, 3500, 15500]
return input_vecs, labels def train_linear_unit():
'''
使用数据训练线性单元
'''
# 创建感知器,输入参数的特征数为2(工作年限,级别)
lu = LinearUnit(2)
# 训练,迭代10轮, 学习速率为0.005
input_vecs, labels = get_training_dataset()
lu.train(input_vecs, labels, 10, 0.005)
#返回训练好的线性单元
return lu def plot(linear_unit):
import numpy as np
from mpl_toolkits.mplot3d import Axes3D
import matplotlib.pyplot as plt
input_vecs, labels = get_training_dataset()
fig = plt.figure()
ax = Axes3D(fig)
ax.scatter(list(map(lambda x: x[0], input_vecs)),
list(map(lambda x: x[1], input_vecs)),
labels) weights = linear_unit.weights
bias = linear_unit.bias
x = range(0,12,1) # work age
y = range(0,12,1) # level
x, y = np.meshgrid(x, y)
z = weights[0] * x + weights[1] * y + bias
ax.plot_surface(x, y, z, cmap=plt.cm.winter) plt.show() if __name__ == '__main__':
'''训练线性单元'''
linear_unit = train_linear_unit()
# 打印训练获得的权重
#print (linear_unit)
# 测试
print ('预测:')
print ('Work 3.4 years, level 2, monthly salary = %.2f' % linear_unit.predict([3.4,2]))
print ('Work 15 years, level 6, monthly salary = %.2f' % linear_unit.predict([15,6]))
plot(linear_unit)
为了代码的正常运行,你可能还需要下面这个感知机的类文件,另存为Perceptron.py(注意大小写),和上面的代码放在同一个目录下即可。
#coding=utf-8 from functools import reduce # for py3 class Perceptron(object):
def __init__(self, input_num, activator):
'''
初始化感知器,设置输入参数的个数,以及激活函数。
激活函数的类型为double -> double
'''
self.activator = activator
# 权重向量初始化为0
self.weights = [0.0 for _ in range(input_num)]
# 偏置项初始化为0
self.bias = 0.0
def __str__(self):
'''
打印学习到的权重、偏置项
'''
return 'weights\t:%s\nbias\t:%f\n' % (self.weights, self.bias) def predict(self, input_vec):
'''
输入向量,输出感知器的计算结果
'''
# 把input_vec[x1,x2,x3...]和weights[w1,w2,w3,...]打包在一起
# 变成[(x1,w1),(x2,w2),(x3,w3),...]
# 然后利用map函数计算[x1*w1, x2*w2, x3*w3]
# 最后利用reduce求和 #list1 = list(self.weights)
#print ("predict self.weights:", list1) return self.activator(
reduce(lambda a, b: a + b,
list(map(lambda tp: tp[0] * tp[1],
zip(input_vec, self.weights)))
, 0.0) + self.bias)
def train(self, input_vecs, labels, iteration, rate):
'''
输入训练数据:一组向量、与每个向量对应的label;以及训练轮数、学习率
'''
for i in range(iteration):
self._one_iteration(input_vecs, labels, rate) def _one_iteration(self, input_vecs, labels, rate):
'''
一次迭代,把所有的训练数据过一遍
'''
# 把输入和输出打包在一起,成为样本的列表[(input_vec, label), ...]
# 而每个训练样本是(input_vec, label)
samples = zip(input_vecs, labels)
# 对每个样本,按照感知器规则更新权重
for (input_vec, label) in samples:
# 计算感知器在当前权重下的输出
output = self.predict(input_vec)
# 更新权重
self._update_weights(input_vec, output, label, rate) def _update_weights(self, input_vec, output, label, rate):
'''
按照感知器规则更新权重
'''
# 把input_vec[x1,x2,x3,...]和weights[w1,w2,w3,...]打包在一起
# 变成[(x1,w1),(x2,w2),(x3,w3),...]
# 然后利用感知器规则更新权重
delta = label - output
self.weights = list(map( lambda tp: tp[1] + rate * delta * tp[0], zip(input_vec, self.weights)) ) # 更新bias
self.bias += rate * delta print("_update_weights() -------------")
print("label - output = delta:" ,label, output, delta)
print("weights ", self.weights)
print("bias", self.bias) def f(x):
'''
定义激活函数f
'''
return 1 if x > 0 else 0 def get_training_dataset():
'''
基于and真值表构建训练数据
'''
# 构建训练数据
# 输入向量列表
input_vecs = [[1,1], [0,0], [1,0], [0,1]]
# 期望的输出列表,注意要与输入一一对应
# [1,1] -> 1, [0,0] -> 0, [1,0] -> 0, [0,1] -> 0
labels = [1, 0, 0, 0]
return input_vecs, labels def train_and_perceptron():
'''
使用and真值表训练感知器
'''
# 创建感知器,输入参数个数为2(因为and是二元函数),激活函数为f
p = Perceptron(2, f)
# 训练,迭代10轮, 学习速率为0.1
input_vecs, labels = get_training_dataset()
p.train(input_vecs, labels, 10, 0.1)
#返回训练好的感知器
return p if __name__ == '__main__':
# 训练and感知器
and_perception = train_and_perceptron()
# 打印训练获得的权重 # 测试
print (and_perception)
print ('1 and 1 = %d' % and_perception.predict([1, 1]))
print ('0 and 0 = %d' % and_perception.predict([0, 0]))
print ('1 and 0 = %d' % and_perception.predict([1, 0]))
print ('0 and 1 = %d' % and_perception.predict([0, 1]))
正常运行的话,输出的预测结果是这样的:
预测:
Work 3.4 years, level 2, monthly salary = 5125.02
Work 15 years, level 6, monthly salary = 20815.01
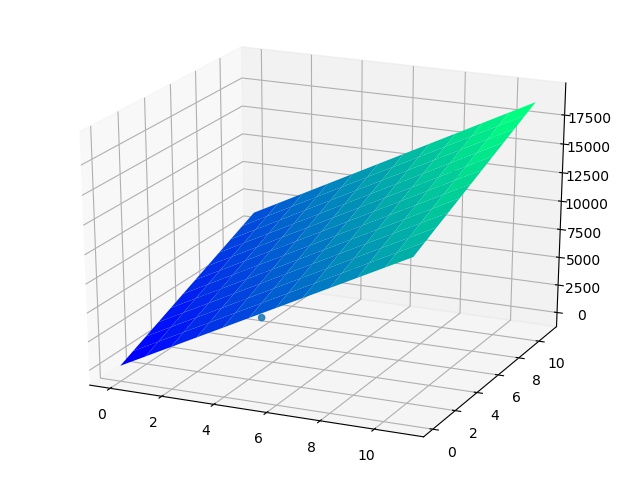
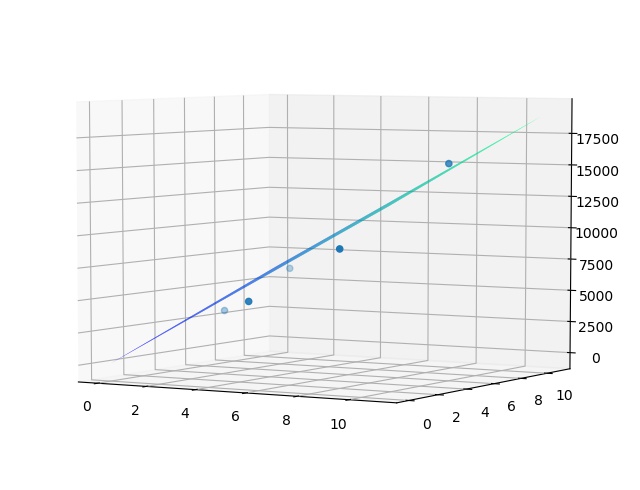
由上可见,本例中两个输入一个输出的线性单元拟合出来的是一个平面(因为预设的工资公式是线性的)。在旋转一个角度后看的更清楚:
原文链接:
https://www.zybuluo.com/hanbingtao/note/448086
文章写的很好,代码也漂亮,墙裂推荐大家看看原文。
用线性单元(LinearUnit)实现工资预测的Python3代码的更多相关文章
- (2)Deep Learning之线性单元和梯度下降
往期回顾 在上一篇文章中,我们已经学会了编写一个简单的感知器,并用它来实现一个线性分类器.你应该还记得用来训练感知器的『感知器规则』.然而,我们并没有关心这个规则是怎么得到的.本文通过介绍另外一种『感 ...
- 感知机和线性单元的C#版本
本文的原版Python代码参考了以下文章: 零基础入门深度学习(1) - 感知器 零基础入门深度学习(2) - 线性单元和梯度下降 在机器学习如火如荼的时代,Python大行其道,几乎所有的机器学习的 ...
- ReLu(修正线性单元)、sigmoid和tahh的比较
不多说,直接上干货! 最近,在看论文,提及到这个修正线性单元(Rectified linear unit,ReLU). Deep Sparse Rectifier Neural Networks Re ...
- 修正线性单元(Rectified linear unit,ReLU)
修正线性单元(Rectified linear unit,ReLU) Rectified linear unit 在神经网络中,常用到的激活函数有sigmoid函数f(x)=11+exp(−x).双曲 ...
- 量化投资_MATLAB在时间序列建模预测及程序代码
1 ARMA时间序列机器特性 下面介绍一种重要的平稳时间序列——ARMA时间序列. ARMA时间序列分为三种: AR模型,auto regressiv model MA模型,moving averag ...
- 修正剑桥模型预测-用python3.4
下面是预测结果: #!/usr/bin/env python # -*- coding:utf-8 -*- # __author__ = "blzhu" ""& ...
- 基于深度学习方法的dota2游戏数据分析与胜率预测(python3.6+keras框架实现)
很久以前就有想过使用深度学习模型来对dota2的对局数据进行建模分析,以便在英雄选择,出装方面有所指导,帮助自己提升天梯等级,但苦于找不到数据源,该计划搁置了很长时间.直到前些日子,看到社区有老哥提到 ...
- kaggle预测房价的代码步骤
# -*- coding: utf-8 -*- """ Created on Sat Oct 20 14:03:05 2018 @author: 12958 " ...
- 用python实现MRO算法
引子: 如图反映了python3中,几个类的继承关系和查找顺序.对于类A,其查找顺序为:A,B,E,C,F,D,G,(Object),这并不是一个简单的深度优先或广度优先的规律.那么这个顺序到底是如何 ...
随机推荐
- TensorFlow-相关 API(学习笔记 )
1.tf.nn.conv2d conv2d( input, filter, strides, padding, use_cudnn_on_gpu=True, data_format='NHWC', n ...
- Problem C: Pie
题目链接 http://codeforces.com/gym/100722/attachments/download/3466/20062007-northwestern-european-regio ...
- [HTTP] PHP 实现 HTTP Server 原理
单进程服务器简陋版: <?php /** * Single http server. * * Access http://127.0.0.1:8081 * * @license Apache-2 ...
- Python学习笔记(三): 收集参数
如下代码: >>>def print_params(title,*params) print title print params >>>print_params( ...
- yum安装centos系统依赖库
安装centos系统依赖库,安装软件过程中,经常需要的一些库,可以在编译安装软件前执行如下命令: 首先更新系统(这步可以不执行) yum -y update 这种更新是全部更新,但是有时一些软件不想更 ...
- python os模块实用函数
os.sep可以取代操作系统特定的路径分隔符.windows下为 “\\” os.name字符串指示你正在使用的平台.比如对于Windows,它是'nt',而对于Linux/Unix用户,它是'pos ...
- BZOJ 1115: [POI2009]石子游戏Kam [阶梯NIM]
传送门 有N堆石子,除了第一堆外,每堆石子个数都不少于前一堆的石子个数.两人轮流操作每次操作可以从一堆石子中移走任意多石子,但是要保证操作后仍然满足初始时的条件谁没有石子可移时输掉游戏.问先手是否必胜 ...
- 夏令营讲课内容整理 Day 6 Part 1.
Day6讲了三个大部分的内容. 1.STL 2.初等数论 3.倍增 Part1主要与STL有关. 1.概述 STL的英文全名叫Standard Template Library,翻译成中文就叫标准 ...
- Python图形界面开发编程:wxPython(浅尝篇)
Python 提供了多个图形开发界面的库,几个常用 Python GUI 库如下: Tkinter: Tkinter 模块(Tk 接口)是 Python 的标准 Tk GUI 工具包的接口 .Tk 和 ...
- spring使用中问题汇总
1.配置文件找不到beans元素:可能是xsd与spring版本不一致,导致无法效验: 解决方案:将applicationContext.xml中xsd文件定义的版本改为spring jar包中定义的 ...