STM32应用实例八:与多台MS5803压力传感器I2C通讯
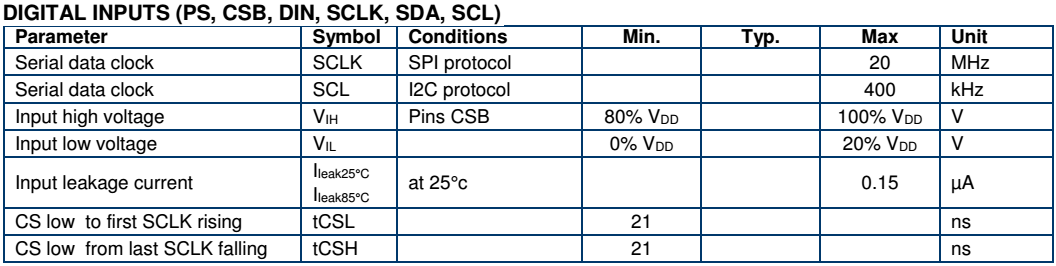
MS5803压力传感器支持SPI和I2C总线通讯,拥有24位AD转换。能够同时获得压力值和温度值,其中压力测量范围为10-1100mbar,温度的测量范围是-40-85摄氏度。各引脚功能及参数如下:
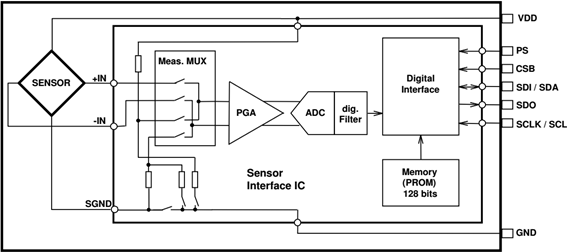
传感器内部结构图如下:
通讯协议的选择通过PS引脚来设置:
|
PS引脚电位 |
通讯模式 |
使用的引脚 |
|
高电平 |
I2C |
SDA, SCL, CSB |
|
低电平 |
SPI |
SDI, SDO, SCLK, CSB |
在SPI模式下,SCLK作为外部输入时钟,SDI作为串行数据输入,支持Mode0和Mode3的时钟极性和相位。传感器的响应数据输出为SDO引脚,片选信号为CSB引脚。界限示意图如下:
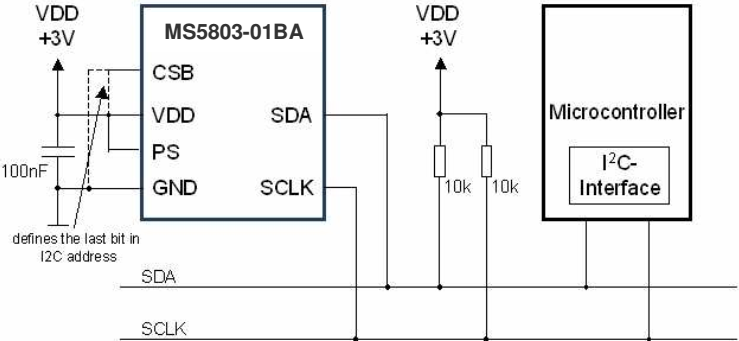
在I2C模式下,SCLK为外部串行时钟输入,SDA位串行数据通讯。CSB引脚作为地只选择,可以链接到VDD或者GND,这也意味着MS5803可以在一条I2C总线接两个设备。在CSP接高电平时,地址为0x76(1110110 b),而CSB接低电平时,地址为0x77 (1110111 b)这个地址是高七位,最后以为有读写命令来决定。实现写命令时,最后一位为0,实现读命令时,最后一位为1。
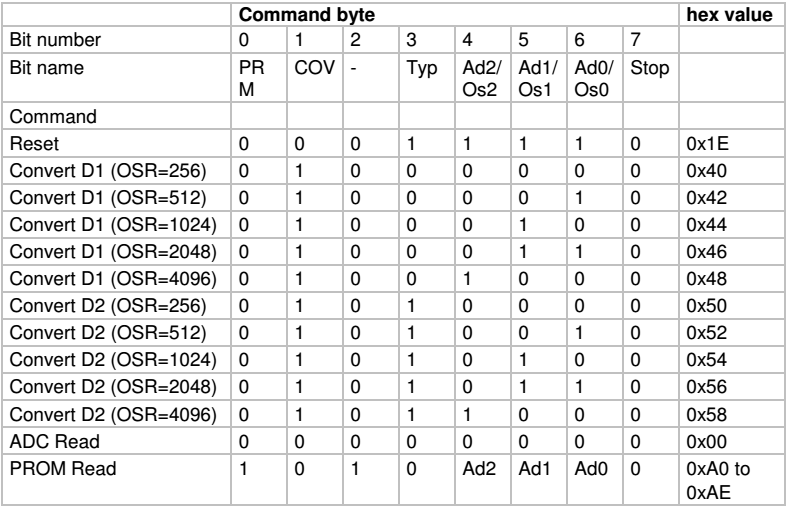
MS5803拥有5个基本命令:复位、读取出厂校准值、数据1转换(压力值数据)、数据2转换(温度值数据)和读取ADC的转换结果。具体分配如下:
因为MS5803的地址位仅有1位是可以设定的,所以一条I2C总线最多只能挂2个MS5803模块。为了让程序具有较好的可移植性,我们在便写程序时不使用对硬件的直接操作,而采用函数指针来操作,所以我们定义了:
/*向MS5803下发指令,指令格式均为1个字节*/
typedef void (*WriteCommandToMS5803Type)(uint8_t deviceAddress,uint8_t command);
/*从MS5803读取多个字节数据的值*/
typedef void (*ReadBytesFromMS5803Type)(uint8_t deviceAddress,uint8_t *pData,uint16_t bytesNum);
以上两个函数指针来实现针对硬件的读写操作。接下来我们开始编写代码。
(1)复位操作
复位操作的数据流如下图所示,只需要发送一条命令就可完成:

/*复位MS5803操作*/
void ResetForMS5803(uint8_t deviceAddress,WriteCommandToMS5803Type WriteCommandToMS5803)
{
uint8_t command=COMMAND_RESET;
/*下发复位命令*/
WriteCommandToMS5803(deviceAddress,command);
}
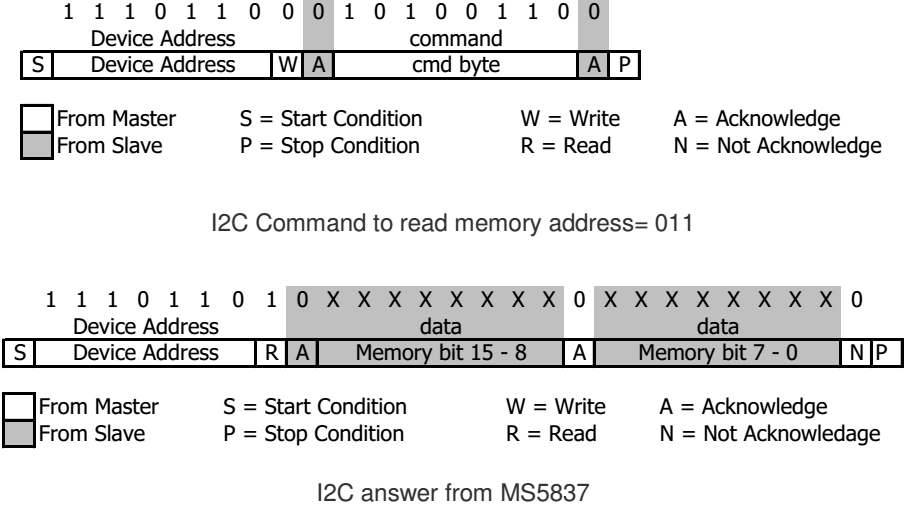
(2)读取校准值
校准值是出厂时厂家校准的各种系数,每台设备都有差异,是固定不变的,只需要一次读取就可以了,共有6个系数,均为16为整数。首先发送读系数的命令,然后读取就可以了,每次读取1个,分6次读取。过程数据流如下图所示:
/*从MS5803的PROM中读取校准数据*/
void GetCalibrationData(uint8_t deviceAddress,uint16_t *caliPara,WriteCommandToMS5803Type WriteCommandToMS5803,ReadBytesFromMS5803Type ReadBytesFromMS5803)
{
/*C1压力灵敏度*/
caliPara[]=ReadPromFromMS5803(deviceAddress,COMMAND_PROM_READ_C1,WriteCommandToMS5803,ReadBytesFromMS5803);
/*C2压力补偿值*/
caliPara[]=ReadPromFromMS5803(deviceAddress,COMMAND_PROM_READ_C2,WriteCommandToMS5803,ReadBytesFromMS5803);
/*C3压力灵敏度温度系数*/
caliPara[]=ReadPromFromMS5803(deviceAddress,COMMAND_PROM_READ_C3,WriteCommandToMS5803,ReadBytesFromMS5803);
/*C4压力补偿温度系数*/
caliPara[]=ReadPromFromMS5803(deviceAddress,COMMAND_PROM_READ_C4,WriteCommandToMS5803,ReadBytesFromMS5803);
/*C5参考温度*/
caliPara[]=ReadPromFromMS5803(deviceAddress,COMMAND_PROM_READ_C5,WriteCommandToMS5803,ReadBytesFromMS5803);
/*C6温度传感器温度系数*/
caliPara[]=ReadPromFromMS5803(deviceAddress,COMMAND_PROM_READ_C6,WriteCommandToMS5803,ReadBytesFromMS5803);
}
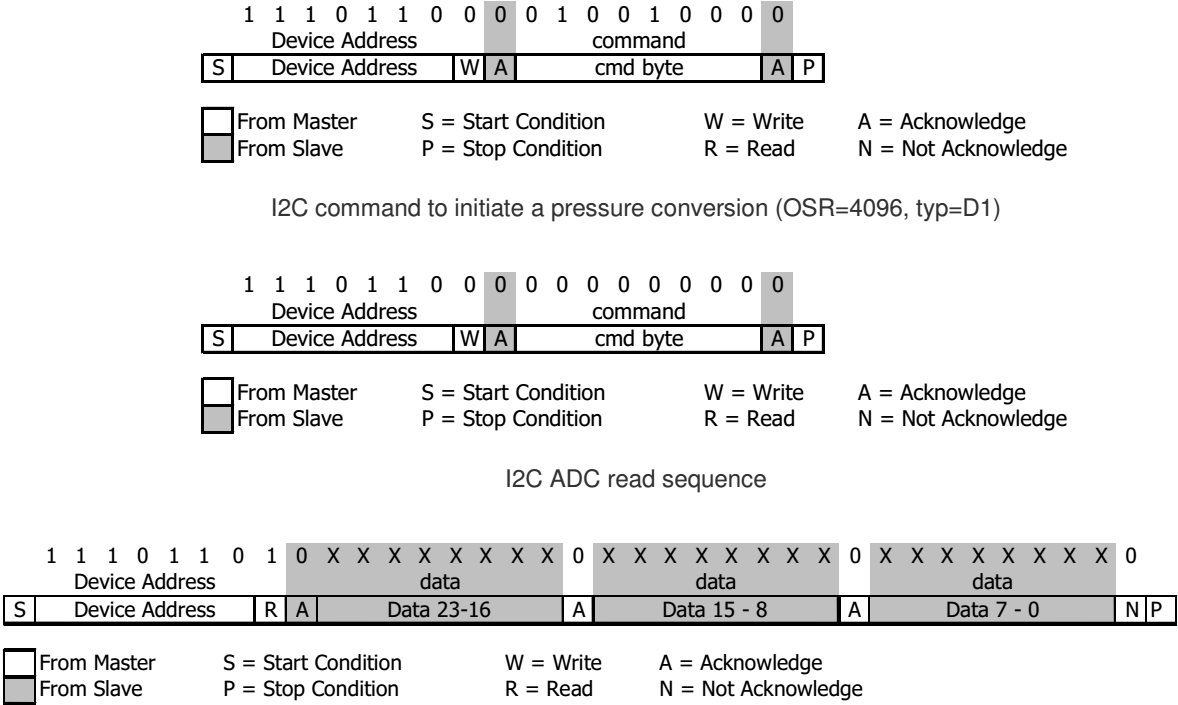
(3)读取转换值
读取转换结果值是我们的目的,可以读取温度和压力两个量,不过一次只能读一个。首先发送命令设定采集压力还是温度,并设定精度。然后发送读取的命令,最后读取对应的值。再使用校准系数计算出最终的物理值。
/*获取转换值,包括温度和压力*/
void GetConversionValue(uint8_t deviceAddress,float *pPres,float *pTemp,uint16_t *caliPara,uint16_t *semaphore,WriteCommandToMS5803Type WriteCommandToMS5803,ReadBytesFromMS5803Type ReadBytesFromMS5803)
{
uint16_t senst1; //C1压力灵敏度
uint16_t offt1; //C2压力补偿值
uint16_t tcs; //C3压力灵敏度温度系数
uint16_t tco; //C4压力补偿温度系数
uint16_t tref; //C5参考温度
uint16_t tempsens; //C6温度传感器温度系数
/*从MS5803的PROM中读取校准数据*/
if(*semaphore>)
{
GetCalibrationData(deviceAddress,caliPara,WriteCommandToMS5803,ReadBytesFromMS5803);
*semaphore=*semaphore-;
}
senst1=caliPara[];
offt1=caliPara[];
tcs=caliPara[];
tco=caliPara[];
tref=caliPara[];
tempsens=caliPara[];
uint32_t digitalPressureValue;
uint32_t digitalTemperatureValue;
/*读取压力数据*/
digitalPressureValue=ReadConversionFromMS5803(deviceAddress,COMMAND_CONVERTD1OSR4096,WriteCommandToMS5803,ReadBytesFromMS5803);
Delayms();
/*读取温度数据*/
digitalTemperatureValue=ReadConversionFromMS5803(deviceAddress,COMMAND_CONVERTD2OSR4096,WriteCommandToMS5803,ReadBytesFromMS5803);
/*对温度进行一阶修正*/
int32_t dT;
int32_t temp;
dT=digitalTemperatureValue-tref*;
temp=(int32_t)(+dT*tempsens/pow(,));
/*对压力进行一阶修正*/
int64_t off;
int64_t sens;
int32_t pres;
off=(int64_t)(offt1*pow(,)+(tco*dT)/pow(,));
sens=(int64_t)(senst1*pow(,)+(tcs*dT)/pow(,));
pres=(int32_t)((digitalPressureValue*sens/pow(,)-off)/pow(,));
/*对温度和压力进行二阶修正*/
int64_t ti=;
int64_t offi=;
int64_t sensi=;
int64_t off2=;
int64_t sens2=;
if(temp<)
{
ti=(int64_t)(*dT*dT/pow(,));
offi=(int64_t)(*(temp-)*(temp-)/pow(,));
sensi=(int64_t)(*(temp-)*(temp-)/pow(,));
off2=off-offi;
sens2=sens-sensi;
temp=temp-(int32_t)ti;
pres=(int32_t)((digitalPressureValue*sens2/pow(,)-off2)/pow(,));
}
if((-<=temp)&&(temp<=))
{
*pTemp=(float)temp/100.0;
}
if((<=pres)&&(pres<=))
{
*pPres=(float)pres/100.0;
}
}
最终在STM32的I2C接口实现通讯时,实现2个WriteCommandToMS5803Type(uint8_t deviceAddress,uint8_t command);和ReadBytesFromMS5803Type(uint8_t deviceAddress,uint8_t *pData,uint16_t bytesNum);函数并调用就可以了,换做其他的平台也只需要重写这两个函数就能实现通讯了。
STM32应用实例八:与多台MS5803压力传感器I2C通讯的更多相关文章
- STM32应用实例七:与宇电设备实现AI-BUS通讯
宇电的设备使用基于RS-485的自定义协议,协议本身比较简单,只有2条指令: 读:地址代号+52H(82) +要读的参数代号+0+0+校验码 写:地址代号+43H(67)+要写的参数代号+写入数低字节 ...
- 【转载】stm32的GPIO八种工作模式
一.推挽输出:可以输出高.低电平,连接数字器件:推挽结构一般是指两个三极管分别受两个互补信号的控制,总是在一个三极管导通的时候另一个截止.高低电平由IC的电源决定. 推挽电路是两个参数 ...
- C语言库函数大全及应用实例八
原文:C语言库函数大全及应用实例八 [编程资料]C语言库函数大全及应用实例八 函数名: kbhit 功 能: 检查 ...
- STM32应用实例十:简析STM32 I2C通讯死锁问题
I2C接口是一种使用非常普遍的MCU与外部设备的接口方式,在STM32中也集成了I2C接口,我们也常常使用它来与外围的传感器等设备通讯. 最近在我们使用STM32F1VET6读取压力和温湿度传感器数据 ...
- STM32应用实例六:与MS5837压力传感器的I2C通讯
MS5837压力传感器是一种可用于电路板上,适用于检测10-1200mbar压力范围的传感器,灵敏度非常高,理论上能够检测到0.01mbar的压力变化,实际使用过程中测试并无明显的变化. MS5837 ...
- 两台电脑使用ROS通讯
一.ROS分布式多机通讯简介 ROS是一种分布式软件框架,节点之间通过松耦合的方式组合,在很多应用场景下,节点可以运行在不同的计算平台上,通过Topic,Service通信. 但是各个节点只能共同拥有 ...
- stm32 IO口八种模式区别
初学STM32,遇到I/O口八种模式的介绍,网上查了一下资料,下面简明写出这几种模式的区别,有不对的地方请大家多多指正! 上拉输入模式:区别在于没有输入信号的时候默认输入高电平(因为有弱上拉).下拉输 ...
- XAML实例教程系列 - XAML传递参数到值转换类实例 八
Kevin Fan分享开发经验,记录开发点滴 XAML实例教程系列 - XAML传递参数到值转换类实例 2012-06-28 05:25 by jv9, 508 阅读, 0 评论, 收藏, 编辑 继上 ...
- eureka多实例,模拟多台机器
本文只有一个eureka server项目,运行在不同的端口,模拟两台eureka服务.开发使用eclipse 4.8 先说pom.xml文件,如果出现问题,首先考虑springboot和其他包版本冲 ...
随机推荐
- 2018.10.19浪在ACM 集训队第一次测试赛
2018.10.19浪在ACM 集训队第一次测试赛 待参考资料: [1]:https://blog.csdn.net/XLno_name/article/details/78559973?utm_so ...
- Vetur:VSCode下强大的Vue开发工具
Vue自从发布以来就一直受到前端开发人员的热爱,而除了一些本身优秀的特征之外,还有就是丰富的插件和工具的支持和更新.虽然现在的编辑器需要安装相应的plugins才能进行Vue组件化开发,但是越来越多优 ...
- idea js改来改去无效问题的解决
不是idea的问题,问题在Chrome上,设置:
- 配置DHCP服务
配置DHCP服务 一.DHCP的简介 1.DHCP是Dynamic Host Configuration Protocol(动态主机配置协议)的缩写: 2.DHCP是从BOOTP(Bootstrap ...
- .NET MVC中的ActionResult
一 摘要 本文介绍了ASP.NET MVC中的ActionResult,本节主要介绍 EmptyResult / Content Result /JavaScriptResult /JsonResu ...
- json遍历 分别使用【原】
json遍历 一 使用org.json.JSONObject遍历 之后的所有遍历都参考了:http://blog.csdn.net/u010648555/article/details/4981538 ...
- 【JUC】CopyOnWriteArrayList
写入时复制(CopyOnWrite) 什么是CopyOnWrite容器 CopyOnWrite容器即写时复制的容器.通俗的理解是当我们往一个容器添加元素的时候,不直接往当前容器添加,而是先将当前容器进 ...
- QT_文本编辑器_源码下载
源码下载: 链接: http://pan.baidu.com/s/1c21EVRy 密码: qub8 实现主要的功能有:新建,打开,保存,另存为,查找(查找的时候需要先将光标放到最下面位置才能查全,不 ...
- .Net进阶系列(13)-异步多线程(Task和Parallel)(被替换)
一. Task开启多线程的三种形式 1. 利用TaskFactory下的StartNew方法,向StartNew传递无参数的委托,或者是Action<object>委托. 2. 利用Tas ...
- Debian/Ubuntu 下网易云音乐无法由图标/列表 打开的解决方案
前言 本文为使用图标或快捷方式直接打开网易云音乐的一个从安装说起的到解决问题的简单教程 环境 debian 9.5 理论上使用apt包管理器的发行版均支持 源使用国内的源即可,无需特殊指定 安装网易云 ...