用STM32玩L298N(正反转、调速)
用STM32玩L298N(正反转、调速)
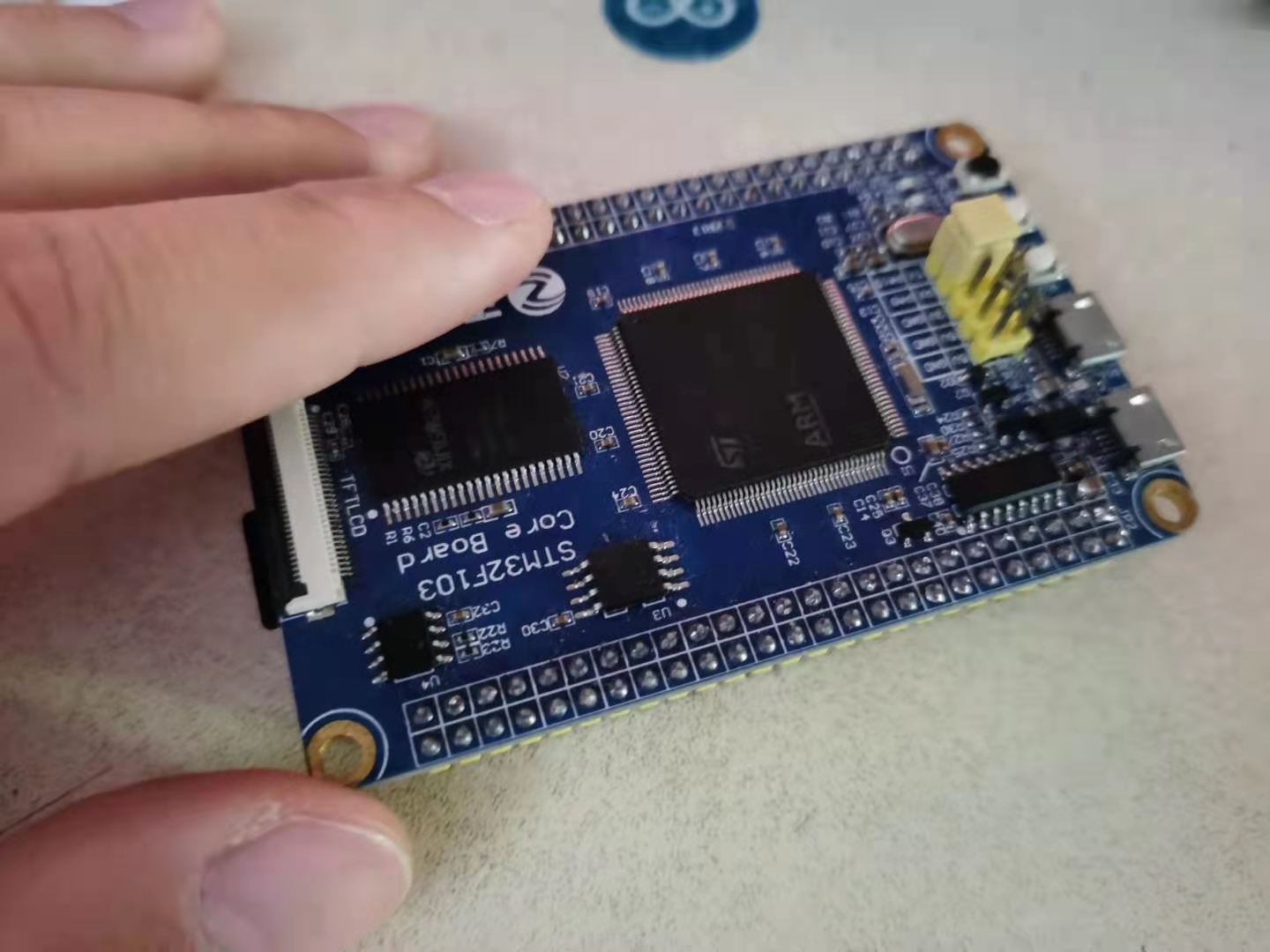
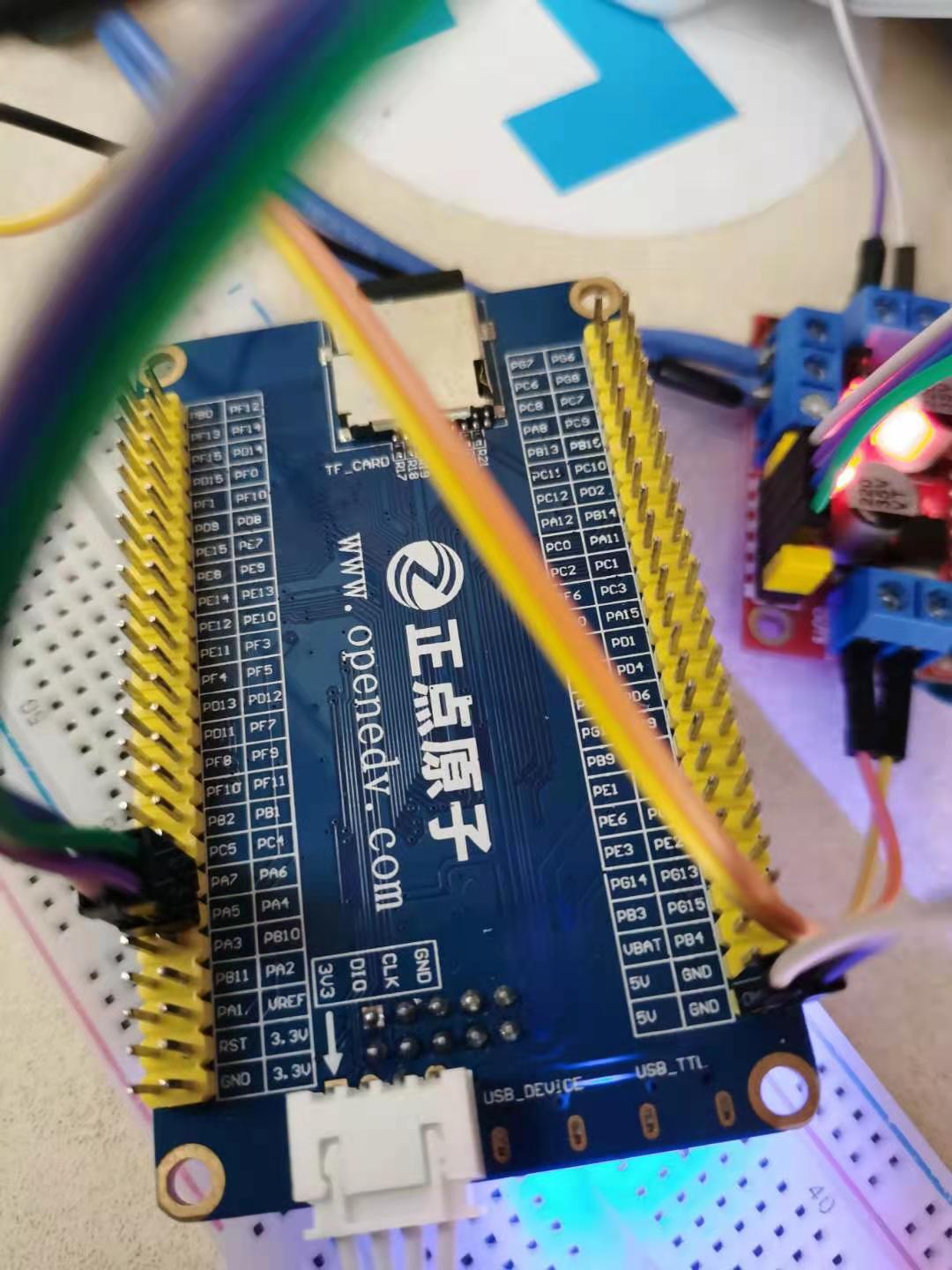
开发板:STM32F103ZET6(正点原子F103核心板)/STM32F103C8T6小板
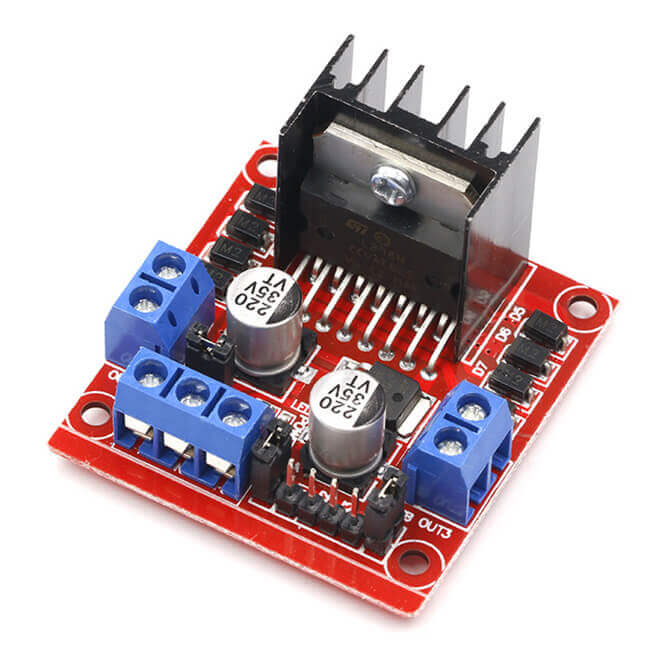
硬件:L298N,网上一搜就有
软件:Keil MDK5.29
买L298N回来的时候,给的例程是51的,我手上又没有这种板子,解决方法就是自己在网上找别人怎么做,找不到就去找原理图,慢慢来,肯定会有收获的!
开发板图片(正点原子F103核心板)
Gitee项目已发布,需要源码请自助下载
STM32F103ZET6:地址(gitee)
STM32F103C8T6:地址(gitee)
控制直流电机正反转
相信你们买回来L298N的时候,样子基本都是这样的
引脚图如下:
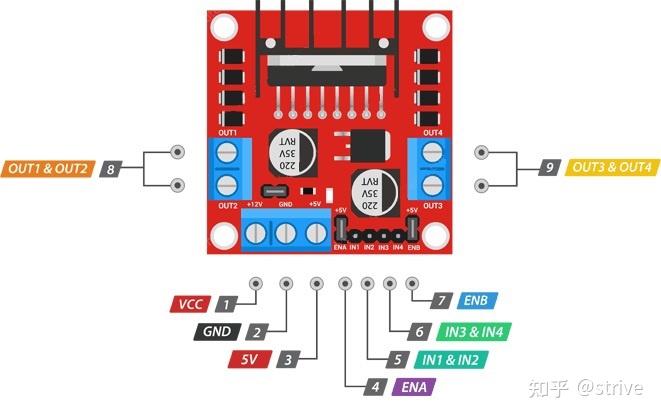
可以看到六个引脚引出来,分别是ENA、IN1/2/3/4、ENB
ENA就是用于使能IN1和IN2的引脚,盖上跳线帽,就是直接使能,拔掉跳线帽就要用pwm来控制电机,ENB同理
OUT1和OUT2就是接第一个直流电机的,OUT3和OUT4同理
控制电机正反转就只需要给数字电压,不需要调速,所以我没有把改线帽拔掉
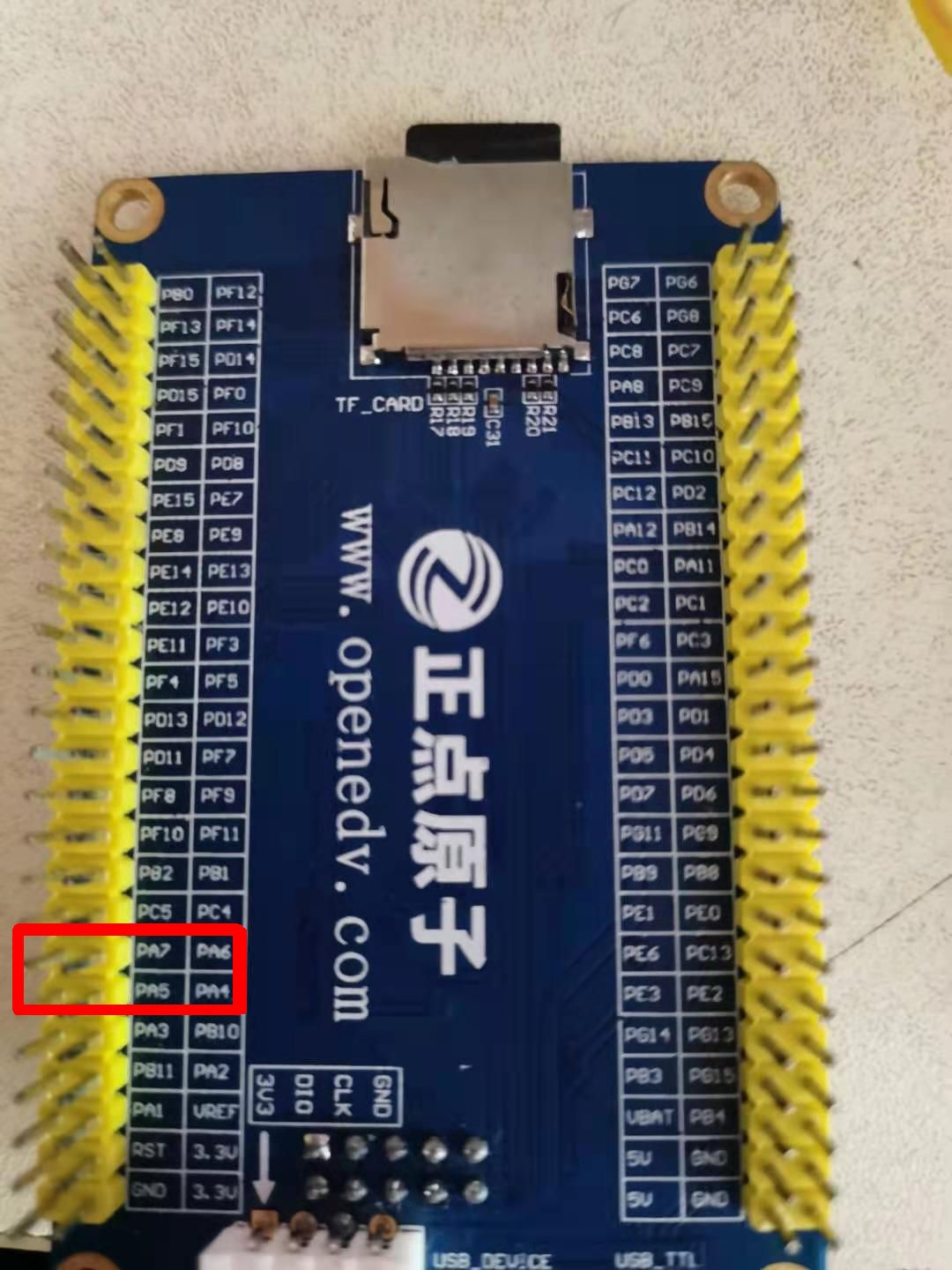
随便找四个引脚,我这里图方便找了PA4/5/6/7
控制程序如下
#define M1_P PAout(4)
#define M1_N PAout(5)
#define M2_P PAout(6)
#define M2_N PAout(7)
void Motor_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能PA端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7; //端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); //根据设定参数初始化PA4/5/6/7
}
void Motor_Stop(void)
{
M1_P = 0;
M1_N = 0;
M2_P = 0;
M2_N = 0;
}
void Motor_Forward(void)
{
M1_P = 1;
M1_N = 0;
M2_P = 1;
M2_N = 0;
}
示例程序如下:
#include "delay.h"
#include "l298n.h"
int main(void)
{
delay_init(); //延时函数初始化
Motor_Init();
while(1)
{
Motor_Forward();
delay_ms(1500);
Motor_Stop();
delay_ms(1500);
}
}
接线图如下:
效果如下:
视频地址(bilibili)
使用PWM调速
调速就要用到pwm,L298N调速方式可以有两种方式,但都是大差不差,一种是ENA直接使能(1和0),在IN1/2那里给pwm控制,另一种是IN1/2那里给逻辑电平(1和0),ENA用PWM控制,我这里是用的第二种方法,第一种方法我没有研究过...
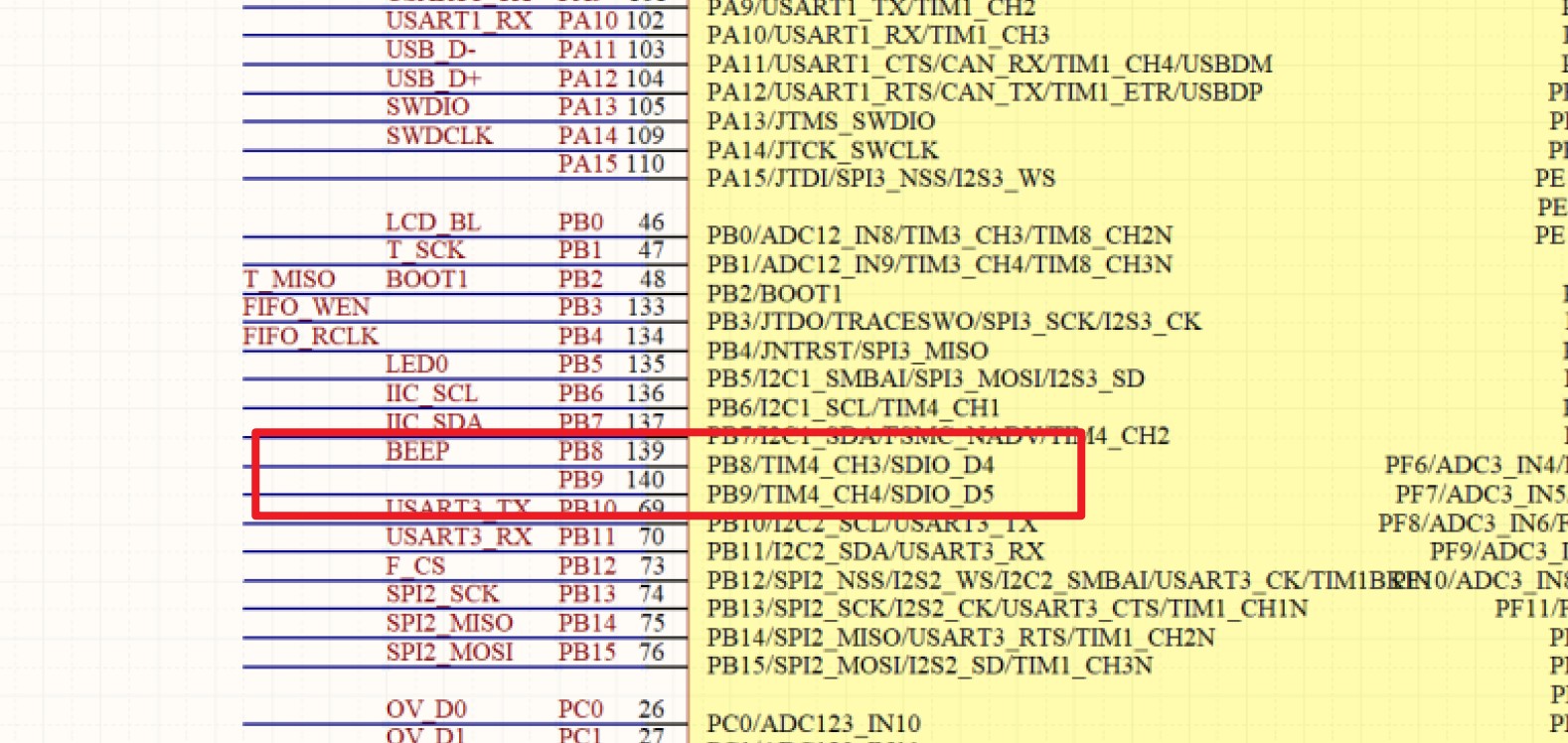
经过查阅资料,决定用PB8/9作为输出pwm的端口
控制程序如下:
//PWM 部分初始化
//arr:自动重装值
//psc:时钟预分频数
void Motor_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); //使能定时器4时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
GPIO_PinRemapConfig(GPIO_Remap_TIM4, ENABLE); //Timer4重映射 TIM4_CH3->PB8 TIM4_CH4->PB9
//设置该引脚为复用输出功能,输出TIM_CH1和TIM_CH2和的PWM脉冲波形
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8|GPIO_Pin_9; //TIM_CH3和TIM_CH4
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO
//初始化TIM3
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//初始化TIM4 Channel2 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC3Init(TIM4, &TIM_OCInitStructure); //初始化外设TIM4 OC3
TIM_OC4Init(TIM4, &TIM_OCInitStructure); //初始化外设TIM4 OC4
TIM_OC3PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM4在CCR1上的预装载寄存器
TIM_OC4PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM4在CCR2上的预装载寄存器
TIM_Cmd(TIM4, ENABLE); //使能TIM4
}
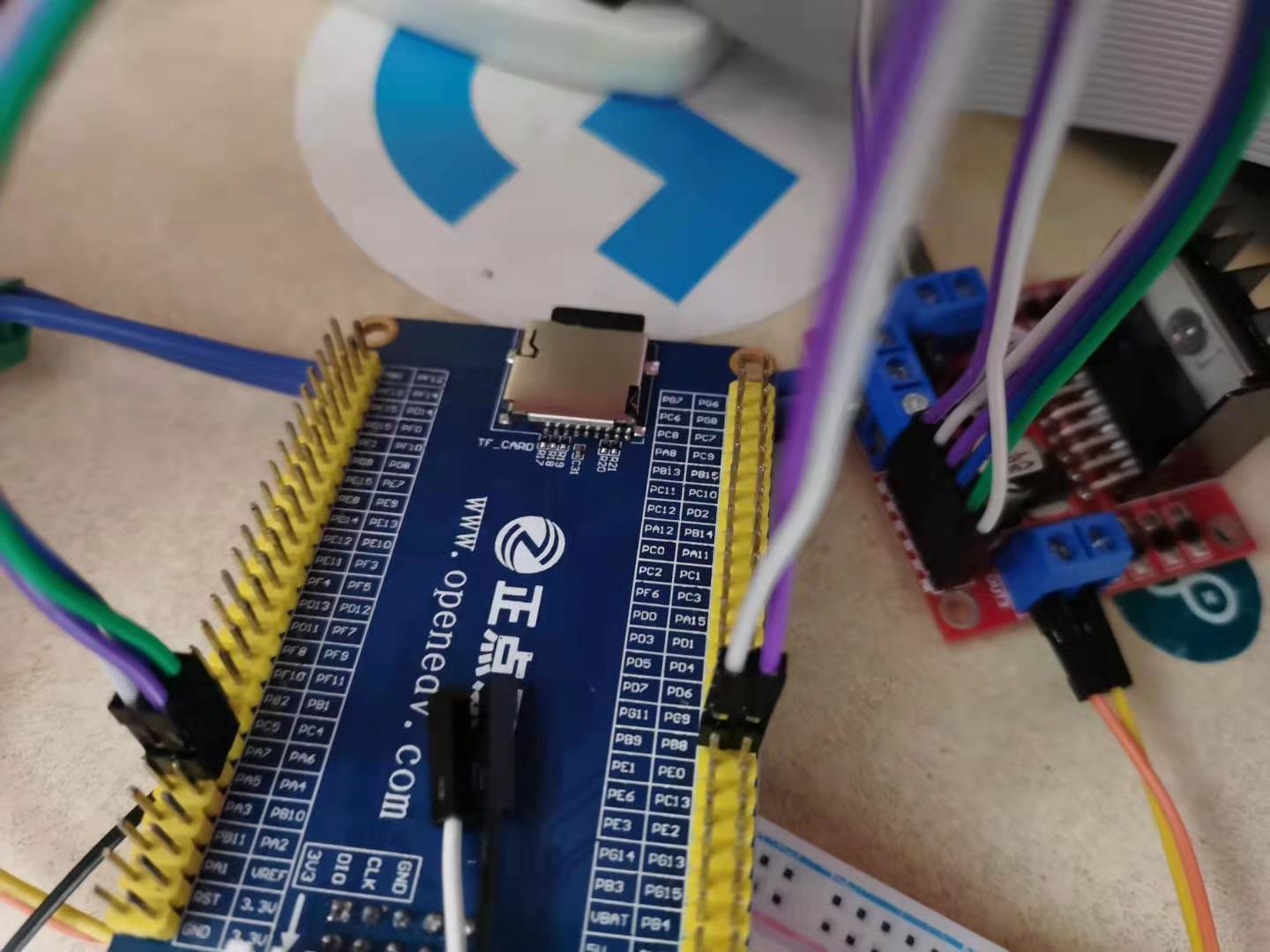
接线图如下:
示例程序如下:
#include "delay.h"
#include "l298n.h"
int main(void)
{
delay_init(); //延时函数初始化
Motor_Init();
Motor_PWM_Init(899,0);
/*
定时器从0开始计数到899,共900次计数,即自动重载值为900
不分频。PWM频率=72000000/900=80Khz
*/
TIM_SetCompare3(TIM4,400); //TIM4 通道3 用400作为区分高低的线
TIM_SetCompare4(TIM4,400); //TIM4 通道4 用400作为区分高低的线
while(1)
{
Motor_Forward();
delay_ms(1500);
Motor_Stop();
delay_ms(1500);
Motor_Backward();
delay_ms(3000);
}
}
如果要改输出pwm的端口的话,必须看清楚程序的通道和定时器标号
效果如下:
视频地址(bilibili)
用STM32玩L298N(正反转、调速)的更多相关文章
- 玩转X-CTR100 l STM32F4 l TB6612直流电机调速控制
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器的直流调速电机控制,X ...
- PWM是如何调节直流电机转速的?电机正反转的原理又是怎样的?
电机是重要的执行机构,可以将电转转化为机械能,从而驱动北控设备的转动或者移动,在我们的生活中应用非常广泛.例如,应用在电动工具.电动平衡车.电动园林工具.儿童玩具中.直流电机的实物图如下图所示. 1- ...
- [问题解决]不使用PWM调速系统,彻底解决一个L298N带动两个电机却转速不同的问题
问题描述:由单片机的VCC引脚供电,使用L298N控制两个电机,发现左右两个轮子的转速老是不一样,更多的情况是左轮转速高(左轮电机接OUT1和OUT2),右轮转速低(右轮电机接OUT3和OUT4)甚至 ...
- 过渡与动画 - 缓动效果&基于贝塞尔曲线的调速函数
难题 给过渡和动画加上缓动效果是一种常见的手法(比如具有回弹效果的过渡过程)是一种流行的表现手法,可以让界面显得更加生动和真实:在现实世界中,物体A点到B点往往也是不完全匀速的 以纯技术的角度来看,回 ...
- 用STM32玩OLED(显示文字、图片、动图gif等)
目录 用STM32玩OLED(显示文字.图片.动图gif等) 1. 显示字符串 2. 显示中文 3. 显示图片 4. 显示动图 5. 总结测试 用STM32玩OLED(显示文字.图片.动图gif等) ...
- 直流调速系统Modelica基本模型
为了便于在OpenModelica进行仿真,形成一个完整的仿真模型,没有使用第三方的库,参照了DrModelica的例程,按照Modelica库的开源模型定义了所用的基本元件模型. 首先给出一些基本类 ...
- 过渡与动画 - steps调速函数&CSS值与单位之ch
写在前面 上一篇中我们熟悉五种内置的缓动曲线和(三次)贝塞尔曲线,并且基于此完成了缓动效果. 但是如果我们想要实现逐帧动画,基于贝塞尔曲线的调速函数就显得有些无能为力了,因为我们并不需要帧与帧之间的过 ...
- PLECS_晶闸管调速系统_9w
3. 直流电机开环调压调速系统模型搭建 (1)电路图 (2)仿真 当 α = pi / 2.7 的时候,直流电机的稳定转速大约保持很低的速度. 随着α的减少,直流电机的速度逐渐增大.当α = pi / ...
- 过渡与动画 - 逐帧动画&steps调速函数
写在前面 上一篇中我们熟悉五种内置的缓动曲线和(三次)贝塞尔曲线,并且基于此完成了缓动效果. 但是如果我们想要实现逐帧动画,基于贝塞尔曲线的调速函数就显得有些无能为力了,因为我们并不需要帧与帧之间的过 ...
随机推荐
- VSCode使用Settings Sync同步配置和插件
转载参考地址:https://www.cnblogs.com/zzhaolei/p/12028241.html 1.需求 自己平常工作,一般在公司用公司的电脑,在家里就是自己的,但是vscode如果配 ...
- ps让图片背景透明
效果图: jpg=>png,背景透明 步骤: 1.选择橡皮工具的第三个 魔术橡皮 保存为png, 按住Ctrl+alt+shift+s 保存:
- 视频Video放器的部分实例方法
***创建一个视频播放器实例 let myPlayer = this.$video(myVideo, { controls: true, autoplay: 'muted', preload: &qu ...
- c++对c的拓展_内联函数
目的:保持处理宏的高效及安全性 解决的问题:1.c中预处理宏有些难以发现的问题 2.c++ 中预处理不能访问类成员,不能作用类的成员函数 作用:无函数调用时开销,又可像普通函数般进行参数.返回值类型安 ...
- python---二分查找的实现
from cal_time import get_running_time @get_running_time def bin_search(li, val): """ ...
- SSM实现个人博客-day03
项目源码免费下载:SSM实现个人博客 有问题请循环vx:kht808 3.相关包与实体类的创建 1.包名与路径如下: 2.实体类的编写 Blog类 public class Blog implemen ...
- mybatisPlus crud操作注意事项
1.调用IService里的update方法,如果是自定义根据除主键外其它字段更新的时候,如果给主键id设置其它值不会更新主键id,如果未设置主键id值或者设置为null,同样不会更新主键id. 2. ...
- Js中的三个错误语句:try、catch、throw
Js中的三个错误语句:try.catch.throw
- QT-守护程序
功能:手动选择EXE文件 1.手动开启应用,关闭应用 2.选择是否自动开启应用程序 3.将应用程序名称,操作,时间记入TXT文档 涉及:文件写入操作,基本控件使用.Windows命令使用 Github ...
- 2022.02.27 CF811E Vladik and Entertaining Flags(线段树+并查集)
2022.02.27 CF811E Vladik and Entertaining Flags(线段树+并查集) https://www.luogu.com.cn/problem/CF811E Ste ...