【点云检测】OpenPCDet 教程系列 [1] 安装 与 ROS运行
前言与参考
主要是介绍库的使用,做笔记区
首先搜索的时候有个问题 一直在我脑子里 hhh 就是MMlab其实还有一个叫mmdetection3d 的库,然后搜的时候发现 hhh 有网友和我一样的疑惑:OpenPCDet和mmdetection3d有什么区别 ? - 知乎 (zhihu.com)
这是OpenMMLab官方的回复:
OpenPCDet 和 mmdetection3d 是两个不同的团队开发和维护的。
从功能角度上讲,mmdet3d 支持的场景和任务更多(包含室内室外场景的物体检测和点云分割),各种模态设定更全面(多模态,以及点云或图像的单模态),总体支持的模型数量更多,覆盖面更广,可以适应不同用户多样的使用和研发需求。OpenPCDet 主要聚焦在基于点云的 3D 目标检测这一种设定上,代码结构相对简单轻量一些。从更新维护的频率上看,MMDet3D 的更新和维护更加频繁,保持了月度的版本更新。
作者:OpenMMLab
链接:https://www.zhihu.com/question/489303511/answer/2206147084
来源:知乎,著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
相关ROS版本的代码参考:
本博客还有一个视频手把手教程,主要是配合此博文同时教学Docker使用,毕竟不是所有人都想用20.04,视频比较基础 建议倍速播放:https://www.bilibili.com/video/BV1xe4y1j72q
这个系列主要是自己学习过程的记录,本文首次书写于: December 24, 2022 可能会随着时间的变化 此教程会有过时概念哦
测试环境
测试环境:
- 本机环境:i9-12900KF, GPU 3090, CUDA 11.3
- 本机系统:Ubuntu 20.04, ROS noetic (Python 3.8)
- 使用的repo和对应的commit:
- https://github.com/Kin-Zhang/OpenPCDet commit 977cd1c
- https://github.com/Kin-Zhang/OpenPCDet_ros commit 7a39361
安装与运行
本机环境的话,建议使用测试环境,如果不想换系统,建议从目录直接跳转Docker运行
本机坏境下
数据集 (无ROS)
注意一定要先安装OpenPCDet 才能进行ROS 实时/BAG的显示哈
以下为 能运行的版本
git clone https://github.com/Kin-Zhang/OpenPCDet
cd OpenPCDet
# please install in your own env
pip install torch==1.10.0+cu113 torchvision==0.11.0+cu113 torchaudio==0.10.0 -f https://download.pytorch.org/whl/torch_stable.html
pip install spconv-cu113
sudo apt-get install python-setuptools
# have some potential risks
sudo chown -R $USER /usr/local/lib/python3.8/
sudo chown -R $USER /usr/local/bin/
# have some potential risks
python3 setup.py develop
然后截图如下为成功安装:

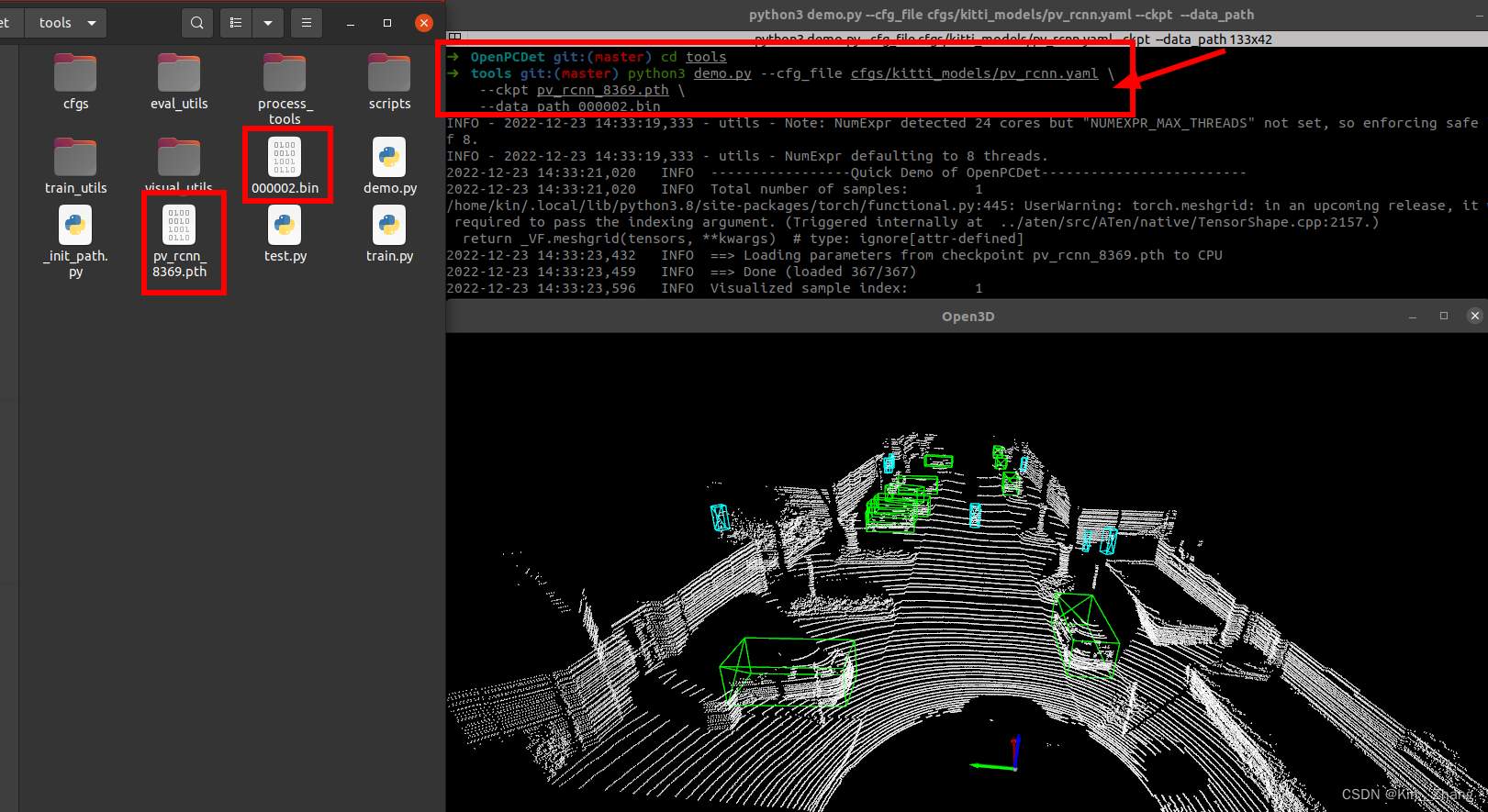
然后我们下载一个model 和 放一个kitti的一帧数据,运行demo.py即可看到效果:
cd tools
python3 demo.py --cfg_file cfgs/kitti_models/pv_rcnn.yaml \
--ckpt pv_rcnn_8369.pth \
--data_path 000002.bin
遇到的错误总结:
pip install failing with: OSError: [Errno 13] Permission denied on directory, reference link
给权限就行
# have some potential risks
sudo chown -R $USER /usr/local/lib/python3.8/
sudo chown -R $USER /usr/local/bin/
# have some potential risks
CUDA版本必须和自己的本机安装的版本对应上,因为develop.py里会检查安装的pytorch版本、CUDA、spconv
显卡驱动与CUDA安装:
THC/THC.h: No such file or directory
!!!Torch不能高于10.0,相关issue链接:https://github.com/open-mmlab/mmdetection3d/issues/1332,https://github.com/1ytic/warp-rnnt/issues/35
RuntimeError: Python version >= 3.8 required.
解决办法,使用py3.8
ROS 实时/BAG
注意:一定要根据上面先安装好OpenPCDet哈!并且是直接安装在系统默认的py38下的 这样才能和ROS链接起来,后面我放个Dockerfile 这样无论什么版本都能拿这个topic就行
结合参考内容自己进行了一点修改,主要是 以2的boundingbox为主 去掉1的一些没啥必要的依赖,代码地址为:https://github.com/Kin-Zhang/OpenPCDet_ros,依赖处理情况 基本就是有ROS即可,但是仅在ROS noetic测试了 因为noetic 默认的py3.8
我后面再好好重构一下,但是现在也是能用的 hhh 只是README 写的可能太简洁了,配合这个博文读会更好一些
实时跑的情况,就是数据在BAG里,理论上这个跑通了 也可以放在实际车上部署(只是py估计真用上产品实车肯定还是不太行的哈
遇到的一些问题:
- glog print在ros_init后无法log使用,详情见:https://github.com/ros/ros_comm/issues/1384
后面有问题可以评论区留言 我再加进来
Docker container
首先是nvidia-docker的插件安装:
distribution=$(. /etc/os-release;echo $ID$VERSION_ID)
curl -s -L https://nvidia.github.io/nvidia-docker/gpgkey | sudo apt-key add -
curl -s -L https://nvidia.github.io/nvidia-docker/$distribution/nvidia-docker.list | sudo tee /etc/apt/sources.list.d/nvidia-docker.list
sudo apt-get update && sudo apt-get install -y nvidia-container-toolkit
sudo systemctl restart docker
Build 或者 pull image 选一个:
# choose one!
# option A: pull
docker pull zhangkin/openpcdet:ros
# option B: build by yourself
git clone https://github.com/Kin-Zhang/OpenPCDet_ros.git && cd OpenPCDet_ros
docker build -t zhangkin/openpcdet:ros .
run 一个容器:
# if you want to display open3d, check the reference for more info
xhost +local:docker
docker run -it --net=host --gpus all -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix --name pcdet_ros zhangkin/openpcdet:ros /bin/zsh
# if not, simple one
docker run -it --net=host --gpus all --name pcdet_ros zhangkin/openpcdet:ros /bin/zsh
编译OpenPCDet
cd OpenPCDet && python3 setup.py develop
# After screen print: Finished processing dependencies for pcdet==0.6.0
# Test step cp model and test pcd to container:
docker cp /home/kin/workspace/OpenPCDet/tools/pv_rcnn_8369.pth pcdet_ros:/home/kin/workspace/OpenPCDet/tools/
docker cp /home/kin/workspace/OpenPCDet/tools/000002.bin pcdet_ros:/home/kin/workspace/OpenPCDet/tools
# test demo
cd tools && python3 demo.py --cfg_file cfgs/kitti_models/pv_rcnn.yaml \
--ckpt pv_rcnn_8369.pth \
--data_path 000002.bin
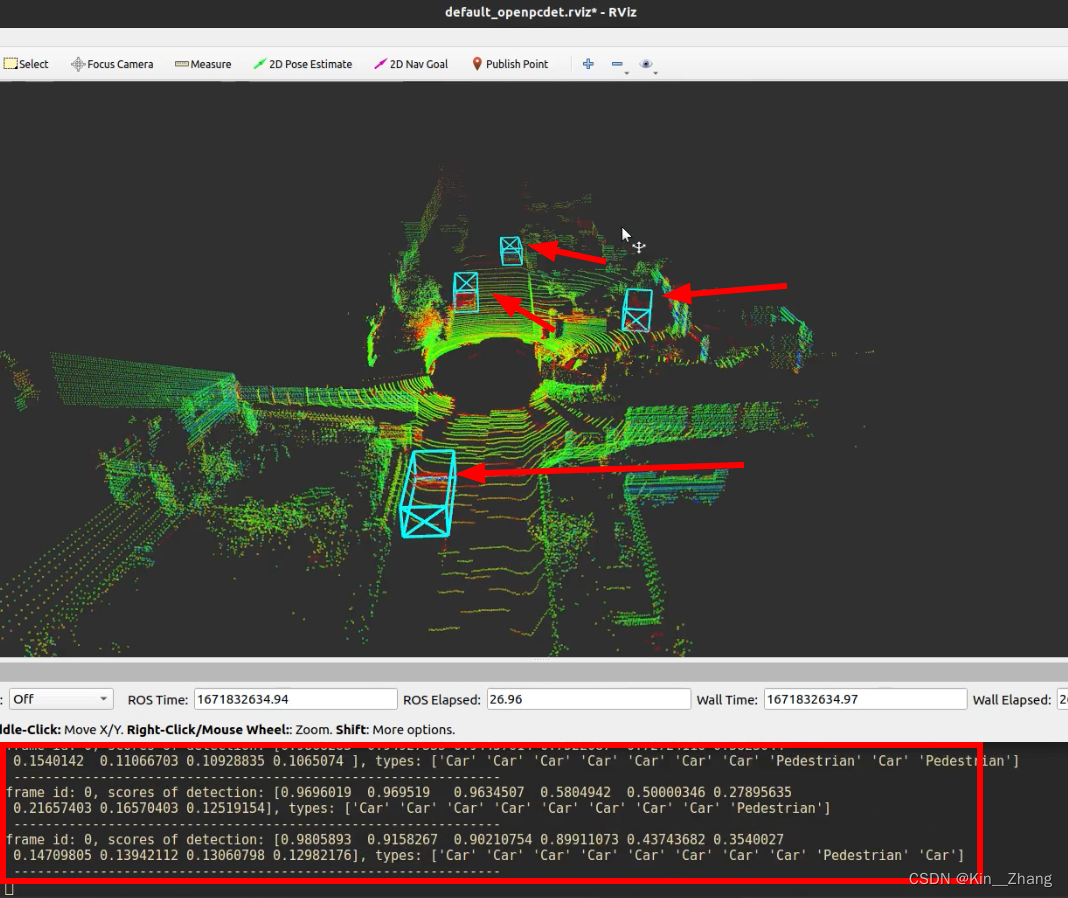
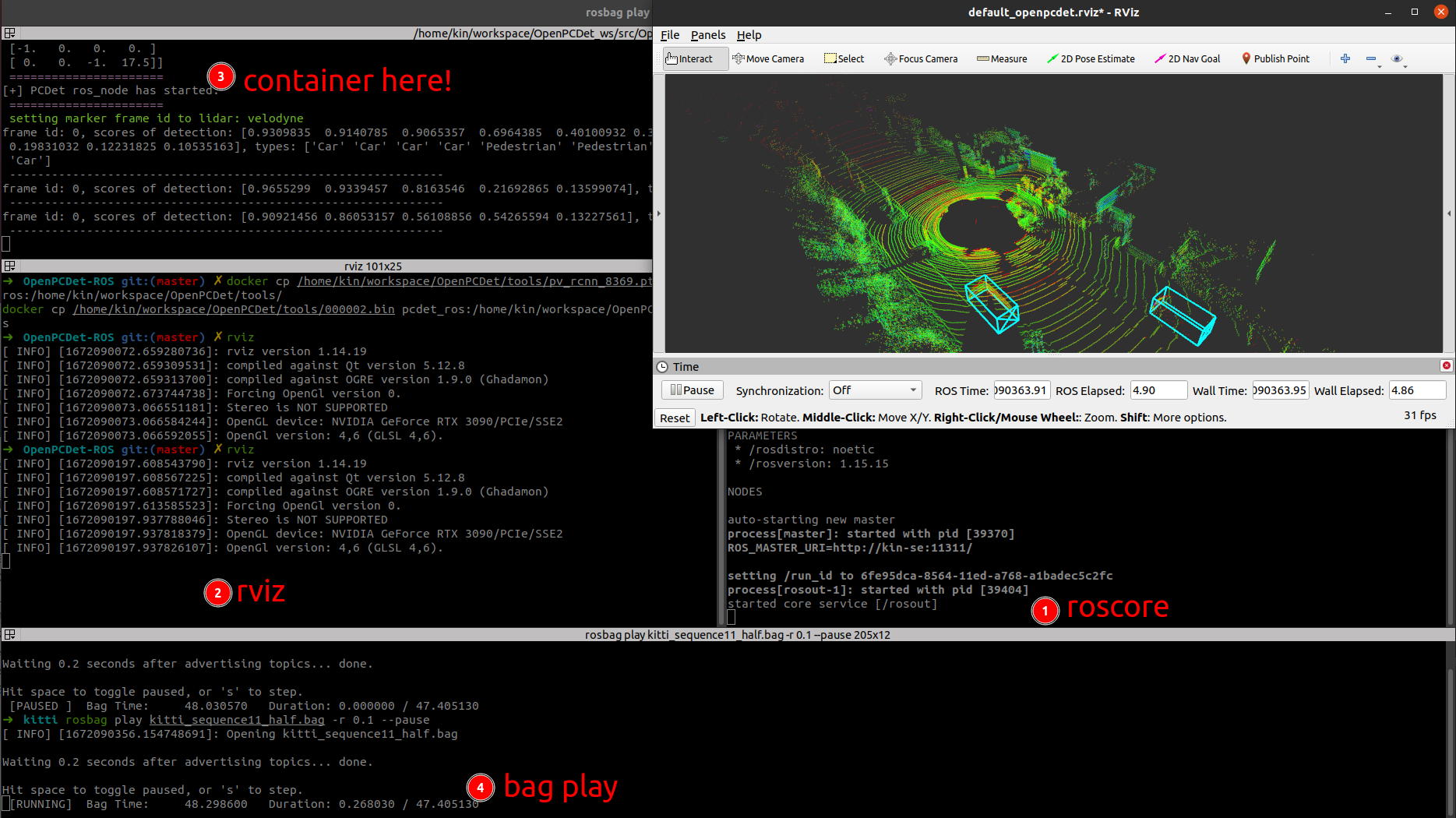
然后在直接走到ros版本
cd /home/kin/workspace/OpenPCDet_ws
catkin build && source devel/setup.zsh
roslaunch openpcdet 3d_object_detector.launch
如图为示意:
赠人点赞 手有余香 ;正向回馈 才能更好开放记录 hhh
【点云检测】OpenPCDet 教程系列 [1] 安装 与 ROS运行的更多相关文章
- 最简单的SAP云平台开发教程 - 如何开发UI5应用并运行在SAP云平台上
选择Services Catalog,根据关键字搜索到WebIDE服务,点击超链接打开WebIDE: 进入workspace,选择Git->Clone Repository: 从我的github ...
- 树莓派Odroid等卡片式电脑上搭建NAS教程系列6-miniDLNA
目录: 1. 树莓派Odroid等卡片式电脑上搭建NAS教程系列1-Ubuntu系统安装 2. 树莓派Odroid等卡片式电脑上搭建NAS教程系列2-SSH连接访问 3. 树莓派Odroid等卡片式电 ...
- python基础系列教程——Python的安装与测试:python的IDE工具PyDev和pycharm,anaconda
---恢复内容开始--- python基础系列教程——Python的安装与测试:python的IDE工具PyDev和pycharm,anaconda 从头开启python的开发环境搭建.安装比较简单, ...
- 【前端】CentOS 7 系列教程之一: 安装 node 最新版
转载请注明出处:http://www.cnblogs.com/shamoyuu/p/linux_1.html 此系列教程从零开始,安装node.mysql.git,nginx.并且设置git自动部署. ...
- Tkinter教程系列01——引言和安装Tk
Tkinter教程系列01--引言和安装Tk 首发于我的个人博客 https://chens.life/tkinter-tutorial-chapter-01-introduction-and-ins ...
- 深度学习与CV教程(13) | 目标检测 (SSD,YOLO系列)
作者:韩信子@ShowMeAI 教程地址:http://www.showmeai.tech/tutorials/37 本文地址:http://www.showmeai.tech/article-det ...
- ROS零门槛学渣教程系列(一)——ubuntu安装
本教程使用虚拟机安装ubuntu 实验前准备:下载ubuntu系统镜像 本教程使用的是ubuntu14.04lts版本,有能力的读者可自行下载安装. 推荐使用本人制作的镜像,该镜像已安装好ROS.和配 ...
- ActiveMQ详细入门教程系列(一)
一.什么是消息中间件 两个系统或两个客户端之间进行消息传送,利用高效可靠的消息传递机制进行平台无关的数据交流,并基于数据通信来进行分布式系统的集成.通过提供消息传递和消息排队模型,它可以在分布式环境下 ...
- WPF入门教程系列二——Application介绍
一.Application介绍 WPF和WinForm 很相似, WPF与WinForm一样有一个 Application对象来进行一些全局的行为和操作,并且每个 Domain (应用程序域)中仅且只 ...
- Laravel教程 一:安装及环境配置
Laravel教程 一:安装及环境配置 此文章为原创文章,未经同意,禁止转载. Homestead 最近在SF上面看到越来越多的Laravel相关的问题,而作为一个Laravel的脑残粉,本来打算有机 ...
随机推荐
- pageoffice 6 Vue+Springboot磁盘路径打开文档
本示例关键代码的编写位置 Vue+Springboot 注意 本文中展示的代码均为关键代码,复制粘贴到您的项目中,按照实际的情况,例如文档路径,用户名等做适当修改即可使用. 在正式的项目开发中,用户文 ...
- AIRIOT答疑第2期|如何使用物联网平台的数据采集与控制引擎?
任性用! 作为AIRIOT物联网低代码平台的五大核心能力引擎之一,数据采集与控制引擎具备极强的系统集成能力,提供丰富的接口,具备海量工业设备驱动库,分布式采集,稳定性高,实现快速的设备接入.报警. ...
- tkinter的Text组件设置禁止编辑
完整代码: from tkinter import * import requests window = Tk() window.geometry('1000x500+300+100') window ...
- 工作流Activiti 迁移 Camunda
后端操作 意思就是: ①更改maven②改包名.类名③改bpmn model中语法④检查迁移后有哪些功能缺失了 1.更改maven 改为 2.换包名.类名 意思就是将 org.activiti.* ...
- exe应用程序安装为windows服务
1.使用instsrv.exe和srvany.exe 当你获取到srvany后并决定将某程序作为服务启动后,请先将srvany安装为系统服务,具体的安装方法有很多,这里使用instsrv,语法如下:安 ...
- WPF 不透明蒙板概述
本文内容 先决条件 使用不透明蒙板创建视觉效果 创建不透明蒙板 将渐变用作不透明蒙板 显示另外 4 个 不透明蒙板能够使部分元素或视觉对象透明或部分透明. 要创建不透明蒙版,请将 Brush 应用于元 ...
- .NET 6+Semantic Kernel快速接入OpenAI接口
大家好,我是Edison. 今天我们快速地使用Semantic Kernel来集成OpenAI,使用20来行代码快速实现一个简单的AIGC应用. 这里,我就不多介绍Semantic Kernel了,包 ...
- 【阿里天池云-龙珠计划】薄书的机器学习笔记——快来一起挖掘幸福感!Task04
[给各位看官请安] 大家一起来集齐七龙珠召唤神龙吧!!! 学习地址:AI训练营机器学习-阿里云天池 推荐一下我由此上车的公众号:AI蜗牛车,时空序列相关文章挺多的. Task01:基于逻辑回归模型的多 ...
- RTOS入门
RTOS是什么? RTOS是一款操作系统,相当于Windows\Linux 分为ucos FreeRTOS RT-Thread LiteOS 比裸机开发的优势在于,多任务系统,不必串行 临界区 临界区 ...
- JavaSE 数据类型以及基本转化与包装
目录 数据类型. 1.基本类型(八个) 数值型 整型类型 byte型:1字节 8bit位 第一位是符号位 null short型:2字节 int 型:4字节 long型:8字节 浮点类型 float ...