Coursera self-driving2, State Estimation and Localization Week4, LIDAR
operating principles 工作原理
Velodyne 加州,Hokuyo 日本,SICK 德国
TOF 就是用发出去收到的时间差和光速算距离
basic LIDAR models (2D, 3D)
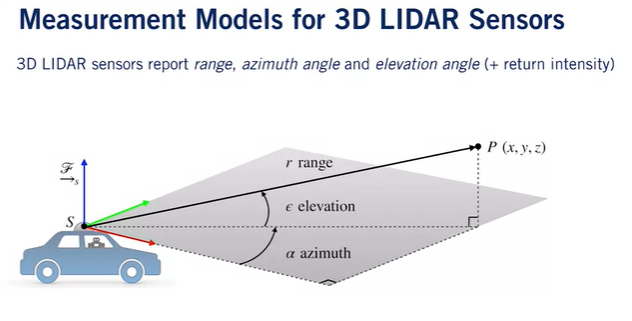
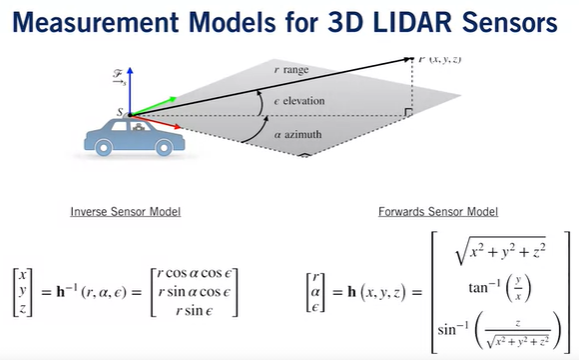
球面坐标系和笛卡尔直角坐标系的转化:
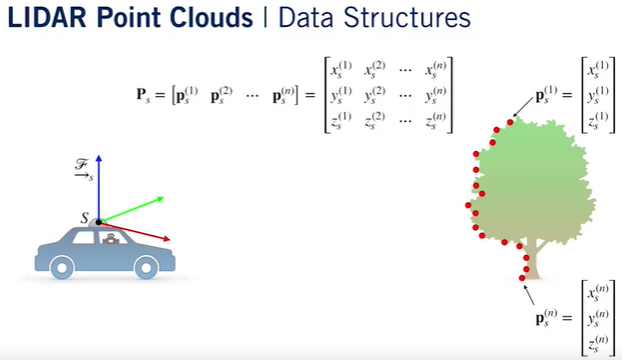
cloud point 点云
1. 点云数据结构
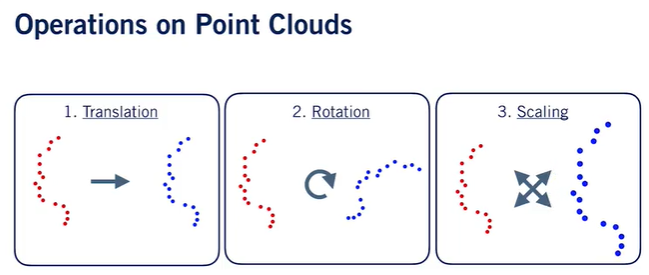
2. 点云空间操作
translation, rotation, scaling, plane-fitting (主要用来识别路面,拿点云来拟合路面的平面,用最小二乘法)
localization via point cloud registration
pose estimation via point cloud data - 也就是解决 cloud set registration problem
1. 什么是 cloud set registration problem? 怎样用来做state estimation?
2. Iterative Closest Point (ICP) algo
在图像领域,有特征匹配算法来匹配对应点,针对点云可以用ICP算法。基本思想就是用两次点云数据的变化来推出motion是怎么变化的, 但是对移动物体来说可能造成激光的测距不变(同样速度下),这样就误认为是静止的. 这个问题可以通过 Robust cost function 来减弱影响,也可以通过和GPS sersor 信息做 sersor fusing.
ICP有两种 Point-to-Point ICP, 和 Point-to-Plain ICP
Coursera self-driving2, State Estimation and Localization Week4, LIDAR的更多相关文章
- State Estimation for Robotics (Tim Barfoot) exercises Answers
Here are some exercises answers for State Estimation for Robotics, which I did in June, 2017. The bo ...
- Coursera, Deep Learning 4, Convolutional Neural Networks - week4,
Face recognition One Shot Learning 只看一次图片,就能以后识别, 传统deep learning 很难做到这个. 而且如果要加一个人到数据库里面,就要重新train ...
- state estimation for robotics-1
概率论是探讨SLAM的一个重要的工具,概率密度函数的概率意义在于它能够描述一个随机变量位于任意区间的概率. p(x<=x<=x+dx)≍p(x).dx(由拉格朗日中值定理)
- A Multi-Sensorial Simultaneous Localization and Mapping (SLAM) System for Low-Cost Micro Aerial Vehicles in GPS-Denied Environments
A Multi-Sensorial Simultaneous Localization and Mapping (SLAM) System for Low-Cost Micro Aerial Vehi ...
- SLAMCN资料收藏转载
网页链接地址:http://www.slamcn.org/index.php/%E9%A6%96%E9%A1%B5 资料非常丰富,内容如下: 首页 目录 [隐藏] 1 SLAM 介绍 1.1 什么是 ...
- SLAM(二)----学习资料下载
有位师兄收集了很多slam的学习资料, 做的很赞, 放到了github上, 地址:https://github.com/liulinbo/slam.git ruben update 0823 2016 ...
- 粒子滤波跟踪移动机器人(MATLAB Robotics System Toolbox)
MathWorks从MATLAB 2015a开始推出与ROS集成的Robotics System Toolbox(机器人系统工具箱),它为自主移动机器人的研发提供现成的算法和硬件接口. 粒子滤波基本流 ...
- 相机-imu外参校准总结
1. 研究背景及相关工作 1)研究背景 单目视觉惯性slam是一种旨在跟踪移动平台的增量运动并使用来自单个车载摄像头和imu传感器的测量结果同时构建周围环境地图的技术.视觉相机和惯性测量单元(imu) ...
- 1.SJ-SLAM-14
1.引言 SLAM:Simultaneous Localization and Mapping 同时定位与地图构建 搭载特定传感器的主体,在没有环境先验信息的情况下,于运动过程中建立环境的模型,同时估 ...
- 三维视觉、SLAM方向全球顶尖实验室汇总
本文作者 任旭倩,公众号:计算机视觉life,编辑成员 欧洲 英国伦敦大学帝国理工学院 Dyson 机器人实验室 http://www.imperial.ac.uk/dyson-robotics-la ...
随机推荐
- 阿里面试:说说@Async实现原理?
@Async 是 Spring 3.0 提供的一个注解,用于标识某类(下的公共方法)或某方法会执行异步调用. 接下来,我们来看下 @Async 的基本使用和实现原理. 1.基本使用 @Async 基本 ...
- AIGC的行业发展
1. AIGC的行业发展 AIGC(Artificial Intelligence Generated Content,人工智能生成内容)是利用人工智能技术来自动生成内容的一种新型内容创作方式.它基于 ...
- windows安装PHP的redis
一定要先看vc版本和位 配置php的redis扩展 以php7.3 nts版为例,不同的php版本对应不通的redis扩展:下载扩展文件:https://windows.php.net/downloa ...
- [oeasy]python0048_取整_int_float_浮点型_cast_扮演_tab_制表键_制表符
转化为10进制 回忆上次内容 上次 把其他进制 转化回 十进制 用的是 int 函数 int 来自于 integer 同源词 还有 integrate entire 意思都是完整的 完整的 和 零散的 ...
- C# 对象复制三种方法效率对比——反射、序列化、表达式树
1.需求 在代码中经常会遇到需要把对象复制一遍,或者把属性名相同的值复制一遍. 比如: public class Student { public int Id { get; set; } publi ...
- java面试一日一题:在创建微服务时,是用RPC还是http
问题:请讲下在做微服务时,是使用RPC还是http 分析:该问题主要考察对RCP及http的理解,也关系到在进行微服务选型时的两大方向,dubbo和springCloud,都是RPC框架,但前者是RP ...
- 【摘译+整理】System.IO.Ports.SerialPort使用注意
远古的一篇博客,内容散落于博文和评论 https://sparxeng.com/blog/software/must-use-net-system-io-ports-serialport C# 和 . ...
- TCP协议测试
TCP协议测试 首先需要测试TCP协议的连接 tcping命令是针对tcp监控的,也可以看到ping值,即使源地址禁ping也可以通过tcping来监控服务器网络状态,除了简单的ping之外,tcpi ...
- adb shell 批处理文件
adb shell 批处理文件 手机截屏,并把图片传到电脑
- 【Vue2】Router 路由
1.什么是单页面应用程序 单页面应用程序(英文名: Single Page Application)简称SPA, 顾名思义,指的是一个Web网站中只有唯一-的一-个HTML页面, 所有的功能与交互都在 ...