SIFT算法原理(3)-确定关键点的主方位,构建关键点描述符
介绍官网:https://docs.opencv.org/3.0-beta/doc/py_tutorials/py_feature2d/py_sift_intro/py_sift_intro.html
在极值点的精确定位后,还需要为找到的特征点进行方向匹配;
特征点方向分配:
可参考:SIFT算法详解和SIFT算法原理详解
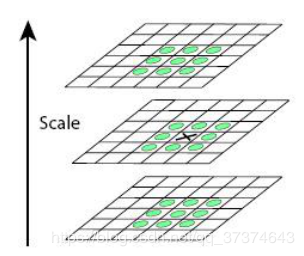
对于在DOG金字塔中检测出的关键点点,采集其所在高斯金字塔图像3σ领域窗口内像素的梯度和方向分布特征。梯度的模值和方向如下:

也就是说我们在高斯差分图中找到了极值点,再回到原来的高斯金字塔图中寻找与σ(尺度)相近的高斯图像, 在以关键点为中心的邻域窗口内采样,并用直方图统计邻域像素的梯度方向。梯度直方图的范围是0~360度,其中每10度一个方向,总共36个方向。直方图的峰值则代表了该关键点处邻域梯度的主方向,即作为该关键点的方向。
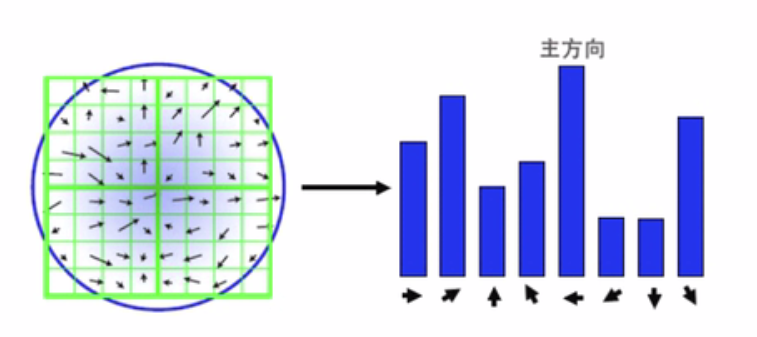
考虑离极值点近的方向的像素点对极值点影响较大,我们会做一个高斯滤波(1.5σ),这样就有一个权重,计算方向直方图时,需要用一个参数等于关键点所在尺度1.5倍的高斯权重窗对方向直方图进行加权,上图中用蓝色的圆形表示,中心处的蓝色较重,表示权值最大,边缘处颜色潜,表示权值小。如下图所示,该示例中为了简化给出了8方向的方向直方图计算结果,实际sift创始人David Lowe的原论文中采用36方向的直方图。
权值为幅度m(x,y )和贡献因子的乘积。贡献因子是采样点到关键点(窗口中心)距离的量度,距离越大,贡献因子越小.直方图的峰值代表了该关键点处邻域梯度的主方向.

特征点主方向的确定
方向直方图的峰值则代表了该特征点处邻域梯度的方向,以直方图中最大值作为该关键点的主方向。为了增强匹配的鲁棒性,只保留峰值大于主方向峰值80%的方向(另一个方向的直方图的幅值大于主方向峰值80%的方向)作为该关键点的辅方向。因此,对于同一梯度值的多个峰值的关键点位置,在相同位置和尺度将会有多个关键点被创建但方向不同。仅有15%的关键点被赋予多个方向,但可以明显的提高关键点匹配的稳定性。实际编程实现中,就是把该关键点复制成多份关键点,并将方向值分别赋给这些复制后的关键点,并且,离散的梯度方向直方图要进行插值拟合处理,来求得更精确的方向角度值。
为了防止某个梯度方向角度因受到噪声的干扰而突变,我们还需要对梯度方向直方图进行平滑处理。Opencv 所使用的平滑公式为:

其中i∈[0,35],h 和H 分别表示平滑前和平滑后的直方图。由于角度是循环的,即00=3600,如果出现h(j),j超出了(0,…,35)的范围,那么可以通过圆周循环的方法找到它所对应的、在00=3600之间的值,如h(-1) = h(35)。
梯度直方图的抛物线插值
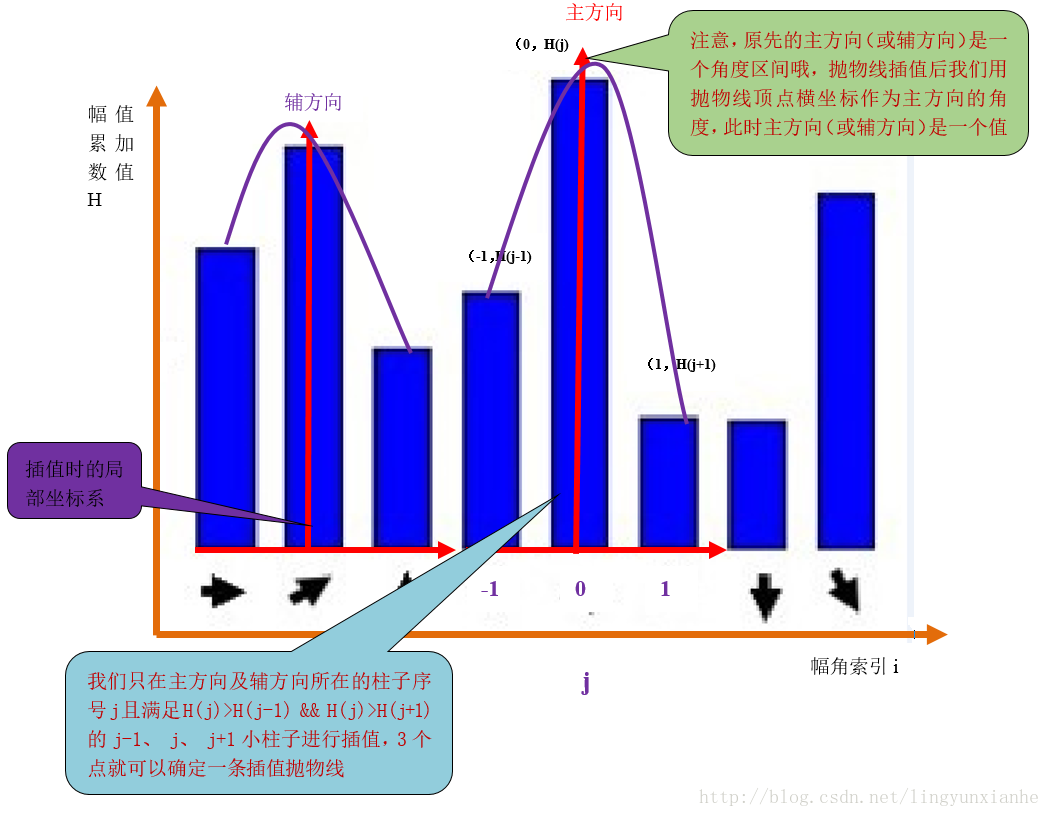
假设我们在第i个小柱子要找一个精确的方向,那么由上面分析知道:
设插值抛物线方程为h(t)=at2+bt+c,其中a、b、c为抛物线的系数,t为自变量,t∈[-1,1],此抛物线求导并令它等于0。
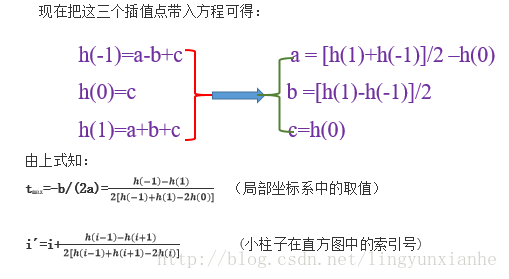
即h(t)´=0 得tmax=-b/(2a)
现在把这三个插值点带入方程可得:
得到特征点的主方向后,对于每个特征点可以得到三个信息(x,y,σ,θ),即位置、尺度和方向。由此可以确定一个SIFT特征区域,一个SIFT特征区域由三个值表示,中心表示特征点位置,半径表示关键点的尺度,箭头表示主方向。具有多个方向的关键点可以被复制成多份,然后将方向值分别赋给复制后的特征点,一个特征点就产生了多个坐标、尺度相等,但是方向不同的特征点。
构建关键点描述符
上面我们已经找到图片的关键点,但是我们只找到一个图片的关键点是不可以的,必须找到两个图片的关键点并把他们匹配起来,因此我们就需要用描述符将其匹配;
那么描述符是什么呢?
描述符是一组向量
使用一组向量来描述关键点也就是生成特征点描述子,这个描述符不只包含特征点,也含有特征点周围对其有贡献的像素点。描述子应具有较高的独立性,以保证匹配率。
特征描述符的生成大致有三个步骤:
1.校正旋转主方向,确保旋转不变性。
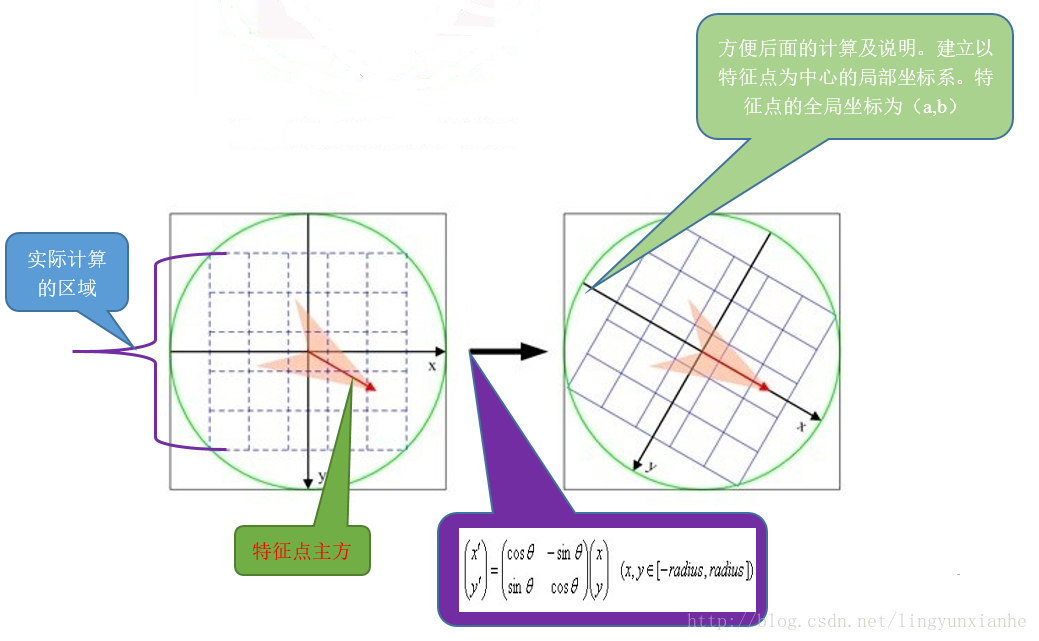
为了保证特征矢量的旋转不变性,要以特征点为中心,在附近邻域内将坐标轴旋转θ(特征点的主方向)角度,即将坐标轴旋转为特征点的主方向。旋转后邻域内像素的新坐标为:
梯度直方图的生成
将邻域内的采样点分配到对应的子区域内,将子区域内的梯度值分配到8个方向上,计算其权值。
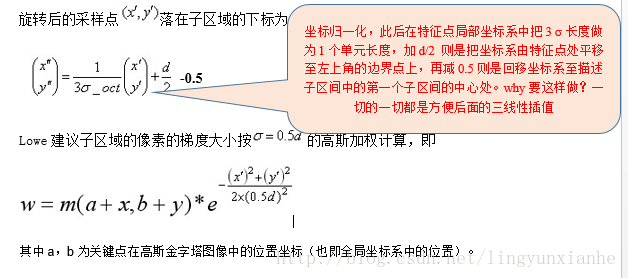
旋转后的采样点 落在子区域的下标为
2.生成描述子,最终形成一个128维的特征向量
旋转后以主方向为中心取 8×8的窗口。下图所示,左图的中央为当前关键点的位置,每个小格代表为关键点邻域所在尺度空间的一个像素,求取每个像素的梯度幅值与梯度方向,箭头方向代表该像素的梯度方向,长度代表梯度幅值,然后利用高斯窗口对其进行加权运算。最后在每个4×4的小块上绘制8个方向的梯度直方图,计算每个梯度方向的累加值,即可形成一个种子点,如右图所示。每个特征点由4个种子点组成,每个种子点有8个方向的向量信息。这种邻域方向性信息联合增强了算法的抗噪声能力,同时对于含有定位误差的特征匹配也提供了比较理性的容错性。
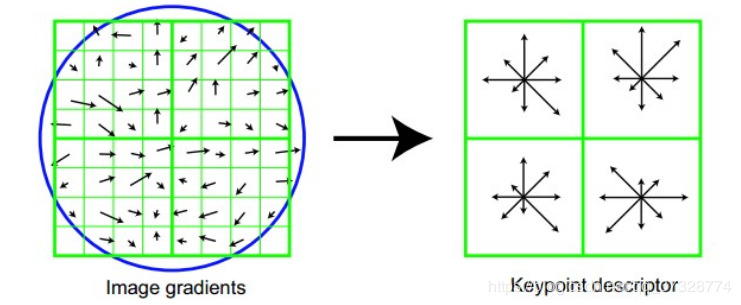
与求主方向不同,此时每个种子区域的梯度直方图在0-360之间划分为8个方向区间,每个区间为45度,即每个种子点有8个方向的梯度强度信息。
在实际的计算过程中,为了增强匹配的稳健性,Lowe建议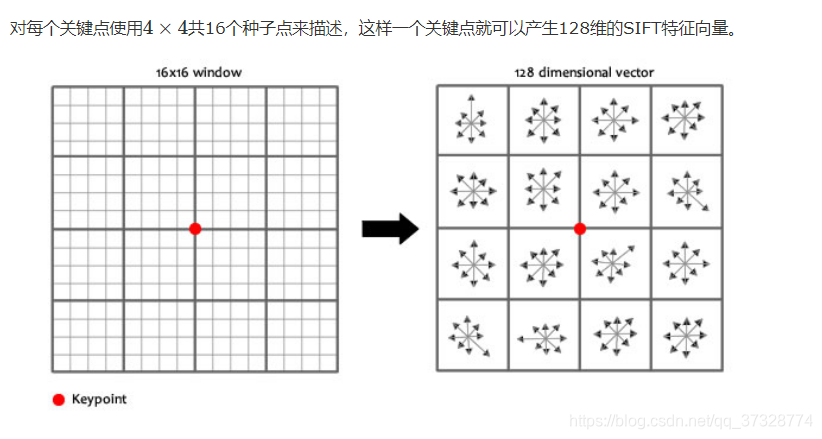
通过对特征点周围的像素进行分块,计算块内梯度直方图,生成具有独特性的向量,这个向量是该区域图像信息的一种抽象,具有唯一性。
3.归一化处理,将特征向量长度进行归一化处理,进一步去除光照的影响。
在大佬论文中使用三线差值?(这一部分占时没看太懂)
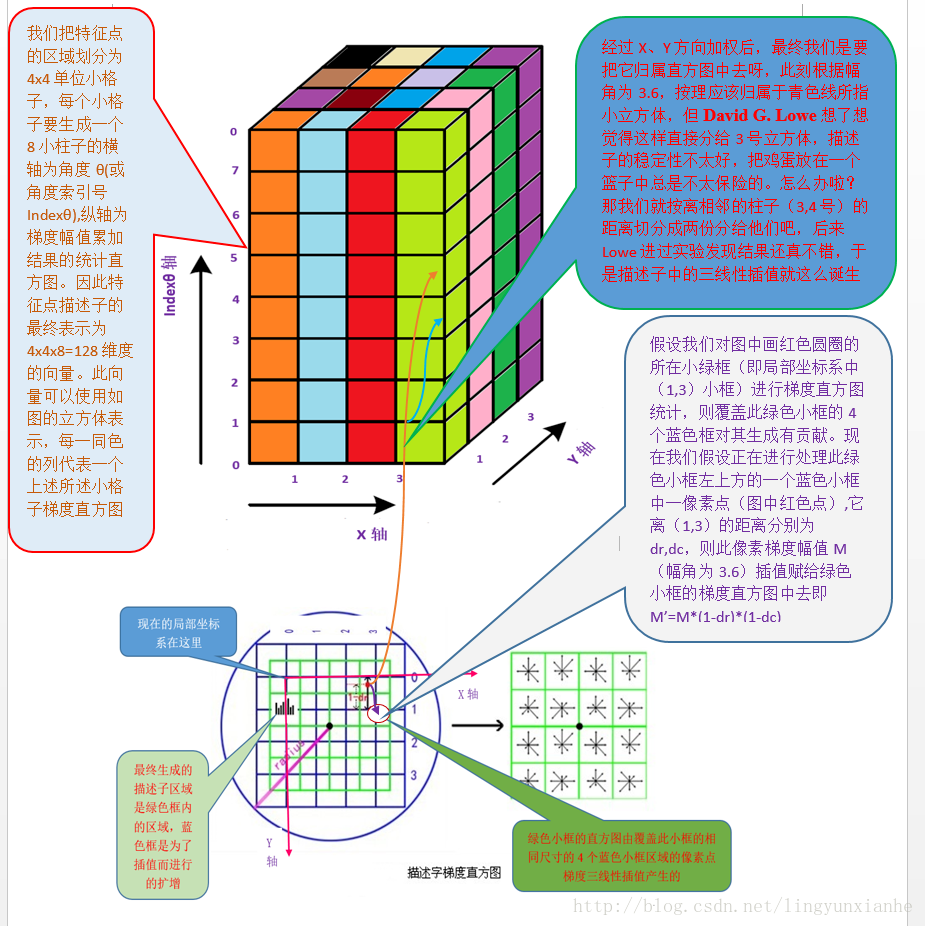
采样点在子区域中的下标(x'',y'') (图中蓝色窗口内红色点)线性插值,计算其对每个种子点的贡献。如图中的红色点,落在第0行和第1行之间,对这两行都有贡献。对第0行第3列种子点的贡献因子为dr,对第1行第3列的贡献因子为1-dr,同理,对邻近两列的贡献因子为dc和1-dc,对邻近两个方向的贡献因子为do和1-do。则最终累加在每个方向上的梯度大小为:

其中k,m,n为0(像素点超出了对要插值区间的四个邻近子区间所在范围)或为1(像素点处在对要插值区间的四个邻近子区间之一所在范围)。
特征描述子
如上统计的4*4*8=128个梯度信息即为该关键点的特征向量。
特征向量形成后,为了去除光照变化的影响,需要对它们进行归一化处理,对于图像灰度值整体漂移,图像各点的梯度是邻域像素相减得到,所以也能去除。得到的描述子向量为H=(h1,h2,.......,h128),归一化后的特征向量为L=(L1,L2,......,L128),则
描述子的门限化
非线性光照,相机饱和度变化对造成某些方向的梯度值过大,而对方向的影响微弱。因此设置门限值(向量归一化后,一般取0.2)截断较大的梯度值(大于0.2的则就令它等于0.2,小于0.2的则保持不变)。然后再进行一次归一化处理,提高特征的鉴别性。
描述子相关分析
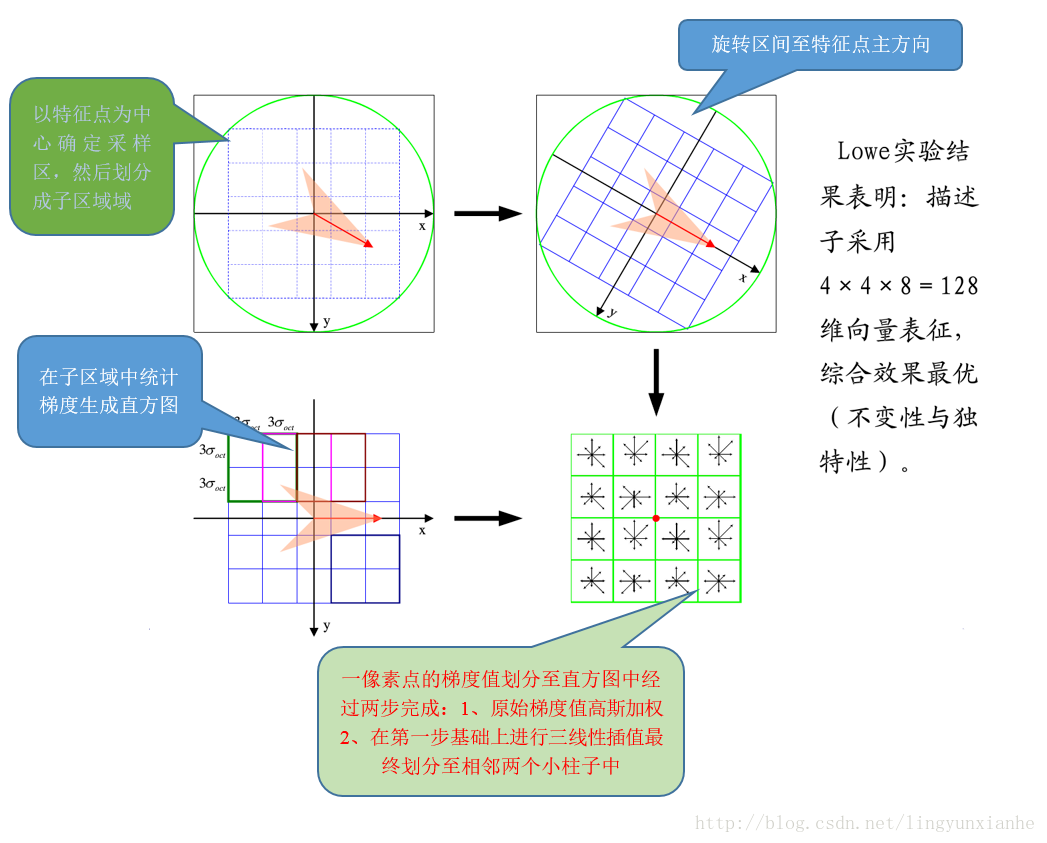
用一组图来概括描述子的生成过程
描述子生成总括
参考:SIFT算法原理详解
https://blog.csdn.net/qq_37328774/article/details/88617952
SIFT算法原理(3)-确定关键点的主方位,构建关键点描述符的更多相关文章
- SIFT算法原理(2)-极值点的精确定位
在SIFT解析(一)建立高斯金字塔中,我们得到了高斯差分金字塔: 检测DOG尺度空间极值点 SIFT关键点是由DOG空间的局部极值点组成的.以中心点进行3X3X3的相邻点比较,检测其是否是图像域和尺度 ...
- SIFT算法大综合
SIFT算法原理+参看资料+问题issue 参考书籍——<图像局部不变性特征与描述>王永明.王贵锦著 SIFT特征点提取——详见博客:https://blog.csdn.net/ling ...
- SIFT算法研究
原创作品,允许转载,转载时请务必以超链接形式标明文章 原始出处 .作者信息和本声明.否则将追究法律责任.http://underthehood.blog.51cto.com/2531780/65835 ...
- 课时46:魔法方法:描述符(property的原理)
目录: 一.描述符(property的原理) 二.课时46课后习题及答案 ********************************** 一.描述符(property的原理) ********* ...
- 计算机视觉-sift(1)原理
1999年由David Lowe首先发表于计算机视觉国际会议(International Conference on Computer Vision,ICCV),2004年再次经David Lowe整 ...
- SIFT特征原理简析(HELU版)
SIFT(Scale-Invariant Feature Transform)是一种具有尺度不变性和光照不变性的特征描述子,也同时是一套特征提取的理论,首次由D. G. Lowe于2004年以< ...
- OpenCV计算机视觉学习(13)——图像特征点检测(Harris角点检测,sift算法)
如果需要处理的原图及代码,请移步小编的GitHub地址 传送门:请点击我 如果点击有误:https://github.com/LeBron-Jian/ComputerVisionPractice 前言 ...
- SIFT算法详解(转)
http://blog.csdn.net/zddblog/article/details/7521424 目录(?)[-] 尺度不变特征变换匹配算法详解 Scale Invariant Feature ...
- 【转】 SIFT算法详解
尺度不变特征变换匹配算法详解Scale Invariant Feature Transform(SIFT)Just For Fun zdd zddmail@gmail.com 对于初学者,从Davi ...
随机推荐
- 小白的linux笔记8:linux自动运行爬虫并发送提醒邮件
有了成功运行的爬虫后,希望能每天定时运行,且遇到错误时能及时发出提醒. 发出提醒 可以用mailx发出邮件做提醒.没有的话先安装Yum install mailx. 以qq邮箱为例,需要设置/etc/ ...
- C语言再学习part1-宏观认识C语言
天下莫柔弱于水,而攻坚强者莫之能胜,以其无以易之也.弱之胜强,柔之胜刚,天下莫不知行,莫能行. —老子 我近来每天都在坚持读书,所以我一直沉浸于古人的智慧中无法自拔.所以如果我这篇博文被你有幸看到,那 ...
- MySQL 8 复制
MySQL 8.0 支持的复制方法: 传统方法(基于二进制日志文件位置) 新方法(基于GTID) MySQL 8.0 支持的同步类型: 异步复制(内置) 同步复制(NDB集群) 半同步复制(半同步复制 ...
- Gird(2)
目录 grid 布局(2) grid区域属性 网格线名称 grid-template-areas 属性 grid-auto-flow 容器内子元素的属性 grid 布局(2) grid区域属性 网格线 ...
- lucas定理 模板
lucas定理 (nm) mod p=(⌊np⌋⌊mp⌋)(n mod&VeryTh ...
- MySQL第七课
统计记录条数 SELECT COUNT(*) FROM 表名; SUM():总和 AVG():平均值 MAX():最大值 MIN():最小值 排序: SELECT 字段名 FROM 表名 ORDE ...
- 洛谷P1218 [USACO1.5]特殊的质数肋骨 Superprime Rib 使用四种算法
洛谷P1218 [USACO1.5]特殊的质数肋骨 Superprime Rib 水题一道…… 题目描述 农民约翰的母牛总是产生最好的肋骨.你能通过农民约翰和美国农业部标记在每根肋骨上的数字认出它们. ...
- c#XML的基本使用
创建XML文档 static void Main(string[] args) { //1.引入命名空间 //2.创建XML文档对象 XmlDocument xmldoc = new XmlDocum ...
- <a>超链接标签,<button>按钮标签,实现返回跳转
超链接: <a href=”#” onClick=”javascript :history.back(-1);”>返回上一页</a> <a href=”#” onClic ...
- SQL Server远程数据库操作(备份、还原等)
· SQL Server远程数据库备份到本地: exp sauser/sapassword@192.168.8.233:1433/DBName file=d:/backup.dmp OWNER=sum ...