玩转X-CTR100 l STM32F4 l HC-SR04超声波测距

我造轮子,你造车,创客一起造起来!更多塔克创新资讯【塔克社区 www.xtark.cn 】【塔克博客 www.cnblogs.com/xtark/ 】
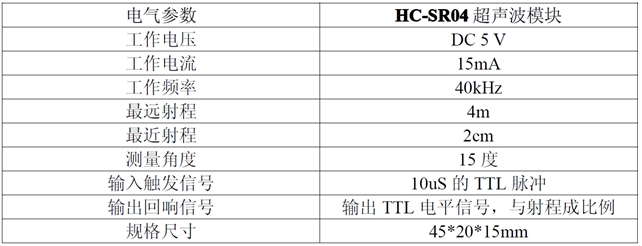
超声波测距模块HC-SR04可以测量2cm~400cm的距离,本文使用X-CTR100控制器定时器进行超声波距离测量。
原理
HC-SR04超声波测距模块可提供 2cm-400cm的非接触式距离感测功能,测距精度可达高到 3mm;模块包括超声波发射器、接收器与控制电路。
基本工作原理:
(1)采用IO 口TRIG 触发测距,给最少10us 的高电平信呈。
(2)模块自动发送8 个40khz 的方波,自动检测是否有信号返回;
(3)有信号返回,通过IO 口ECHO 输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S))/2;
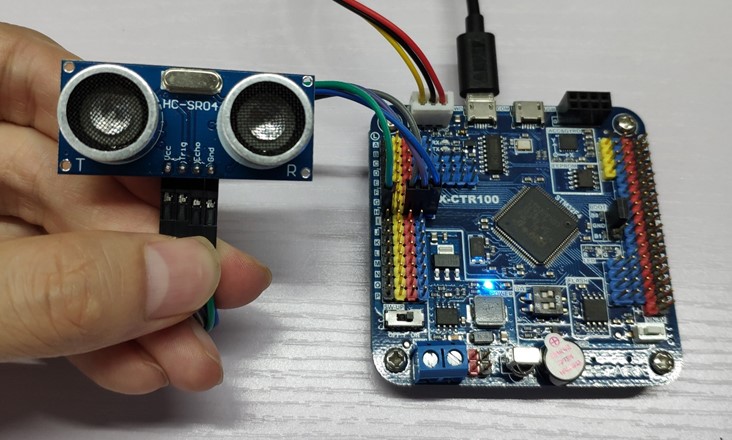
如下图接线,VCC 供5V电源, GND 为地线,TRIG 触发控制信号输入,ECHO 回响信号输出等四个接口端。

超声波时序图

以上时序图表明你只需要提供一个10uS 以上脉冲触发信号,该模块内部将发出8 个40kHz 周期电平并检测回波。一旦检测到有回波信号则输出回响信号。
回响信号的脉冲宽度与所测的距离成正比。由此通过发射信号到收到的回响信号时间间隔可以计算得到距离。
公式:uS/58=厘米或者uS/148=英寸;或是:距离=高电平时间*声速(340M/S)/2;建议测量周期为60ms 以上,以防止发射信号对回响信号的影响。
1、此模块不宜带电连接,若要带电连接,则先让模块的 GND端先连接,否则会影响模块的正常工作。
2、测距时,被测物体的面积不少于 0.5平方米且平面尽量要求平整,否则影响测量的结果。
例程
本例程实现X-CTR100控制器测量超声波距离,并通过串口显示。
硬件说明
硬件资源:
- 串口UART1
- LH接口(作为普通IO使用)
- HC-SR04超声波测距模块(需自备)
硬件连接:
超声波模块连接LH接口,需要4根杜邦线,连接如下。
GND——GND
VCC——5V(红色),
Trig——D0
Echo——D1
软件生态
X-SOFT软件生态,X-API扩展文件如下。
ax_sr04.c——HC-SR04超声波测距源文件
ax_sr04.h——HC-SR04超声波测距头文件
测量方式采用边沿中断触发,Echo上升沿启动定时器,下降沿获取定时器值作为测量值,代码如下。
|
void EXTI1_IRQHandler(void) { //确认是否产生了EXTI Line中断 if (EXTI_GetITStatus(EXTI_Line1) != RESET) { if (GPIO_ReadInputDataBit(GPIOD, GPIO_Pin_1) != 0) // 高电平回波 { TIM_Cmd(TIM7, ENABLE); } else { TIM_Cmd(TIM7, DISABLE); sr04_measurement = TIM_GetCounter(TIM7); TIM_SetCounter(TIM7, 0); } } //清除中断标志位 EXTI_ClearITPendingBit(EXTI_Line1); } |
定时器周期为1us,sr04_measurement为测量时间值,与距离正比,通过多次实际测量值求得系数。
距离 = sr04_measurement*0.173-4.51 ,模型一次函数,多次实际测量后求得系数,经过实测,测量结果准确。

接口函数
|
void AX_SR04_Init(void); //SR04超声波测距初始化 void AX_SR04_StartRanging(void); //SR04启动测量 uint32_t AX_SR04_GetDistance(void); //SR04获取距离值 |
软件说明
每隔500ms测量一次,循环测量,结果通过串口显示,主程序如下。
|
int main(void) { uint32_t temp;
//X-CTR100初始化 AX_Init(115200); printf("***X-CTR100 SR04超声波测距例程***\r\n\r\n");
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置中断优先级分组
//SR04初始化 AX_SR04_Init();
while (1) { //启动测量 AX_SR04_StartRanging(); AX_Delayms(500);
//获取距离值 temp = AX_SR04_GetDistance(); printf("当前距离:%d MM \r\n", temp); } } |
实现效果
测量结果显示如下,与实际距离对比,误差小于1CM。当然超声波的传播速度与温度有关系,如需获得更准确距离,需要进行温度补偿,尤其是远距离测距。

玩转X-CTR100 l STM32F4 l HC-SR04超声波测距的更多相关文章
- 玩转X-CTR100 l STM32F4 l ADC 模拟数字转换
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 AD转换接 ...
- 玩转X-CTR100 l STM32F4 l MPU6050加速度陀螺仪传感器
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 板载加速度 ...
- 玩转X-CTR100 l STM32F4 l X-CTR100与树莓派搭建机器人平台
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器与树莓派Linux系统 ...
- 玩转X-CTR100 l STM32F4 l 舵机控制
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器的舵机控制,X-CTR ...
- 玩转X-CTR100 l STM32F4 l DRV8825 A4988 步进电机控制
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器控制步进电机 ...
- 玩转X-CTR100 l STM32F4 l 基础例程printf、LED、蜂鸣器、拨码开关、位带操作
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器基础板载资源 ...
- 玩转X-CTR100 l STM32F4 l PS2无线手柄
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] SONY的PS2无线手柄是索尼游戏机的遥控手柄,控制 ...
- 玩转X-CTR100 l STM32F4 l DSP指令集性能测试
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 DSP库的 ...
- 玩转X-CTR100 l STM32F4 l FPU单精度浮点性能测试
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器如何开启ST ...
- 玩转X-CTR100 l STM32F4 l RNG硬件随机数发生器
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 STM32F4硬件随 ...
随机推荐
- ACM-ICPC 2018 沈阳赛区网络预赛 Made In Heaven(K短路)题解
思路:K短路裸题 代码: #include<queue> #include<cstring> #include<set> #include<map> # ...
- 【查看内存参数详解】Linux free -m 详细说明
free 命令相对于top 提供了更简洁的查看系统内存使用情况:$ free total used ...
- 51nod 1413 权势二进制
本来刚开始还是想用每一位 -1的个数 然后再乘以10 不断累加 后来发现 完全不是这回事啊 因为本身就是0 和 1 所以只要记录出现的最大的数字 就是答案 因为 n >= 1 // 所以不 ...
- 论文笔记——SQUEEZENET ALEXNET-LEVEL ACCURACY WITH 50X FEWER PARAMETERS AND <0.5MB MODEL SIZE
论文地址:https://arxiv.org/abs/1602.07360 模型地址:https://github.com/DeepScale/SqueezeNet 1. 论文思想 提出一种新的卷积组 ...
- DPDK无法分出大页面:EAL: No free hugepages reported in hugepages-2048kB 解决方法
参考: [dpdk-users] Fw: DPDK Error --> EAL: No free hugepages reported in hugepages-2048kB DPDK无法分出连 ...
- 【Coursera】Security Introduction -Eighth Week(1)
Security Introduction People With Bad Intent 今天,Bob 向 Alice 发送了一条 "Hello,Allice!" 的信息,他们希望 ...
- NOI 16 买房子
买房子(NOI 16) 总时间限制: 1000ms 内存限制: 65536kB 描述 某程序员开始工作,年薪N万,他希望在中关村公馆买一套60平米的房子,现在价格是200万,假设房子价格以每年百分之K ...
- navicat Window . MAC版常用快捷键
navicat 结合快捷键 1.ctrl+q 打开查询窗口 2.ctrl+/ 注释sql语句 3.ctrl+shift +/ 解除注释 4.ctrl+r 运行查询窗口的sql语句 5.ctrl+shi ...
- Codeforces Round #303 (Div. 2)E. Paths and Trees 最短路
E. Paths and Trees time limit per test 3 seconds memory limit per test 256 megabytes input standard ...
- Goroutines和Channels(四)
如果说goroutine是Go语言程序的并发体的话,那么channels则是它们之间的通信机制. 一个channel是一个通信机制,它可以让一个goroutine通过它给另一个goroutine发送值 ...