LINUX配置过程记录(二) 工具安装
安装谷歌游览
sudo apt-get update
sudo apt-get install google-chrome-stable
Ubuntu 16.04下源码安装Catkin
https://blog.csdn.net/WillWinston/article/details/80714334
//1下载源码
sudo apt-get install git
git clone https://github.com/ros/catkin // 2依赖
sudo apt-get install cmake python-catkin-pkg python-empy python-nose python-setuptools libgtest-dev build-essential //3构建并安装Catkin
cd catkin/
cd build
cmake -DCMAKE_BUILD_TYPE=Release ../
make
sudo make install
安装串口
依赖
Required:
* [catkin](http://www.ros.org/wiki/catkin) - cmake and Python based buildsystem
* [cmake](http://www.cmake.org) - buildsystem
* [Python](http://www.python.org) - scripting language
* [empy](http://www.alcyone.com/pyos/empy/) - Python templating library
* [catkin_pkg](http://pypi.python.org/pypi/catkin_pkg/) - Runtime Python library for catkin
安装
Get the code:
git clone https://github.com/wjwwood/serial.git
Build:
make
Build and run the tests:
make test
Build the documentation:
make doc
Install:
sudo make install
工程报错找不到lserial
拷贝库
cd serial/devel/lib
sudo cp libserial.so /user/bin
安装tinyxml
下载源码
直接
make
复制文件到自己工程目录
安装opencv3.4
依赖项目
sudo apt-get install build-essential
sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
sudo apt-get install python-dev python-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libjasper-dev libdc1394-22-dev
下载源码
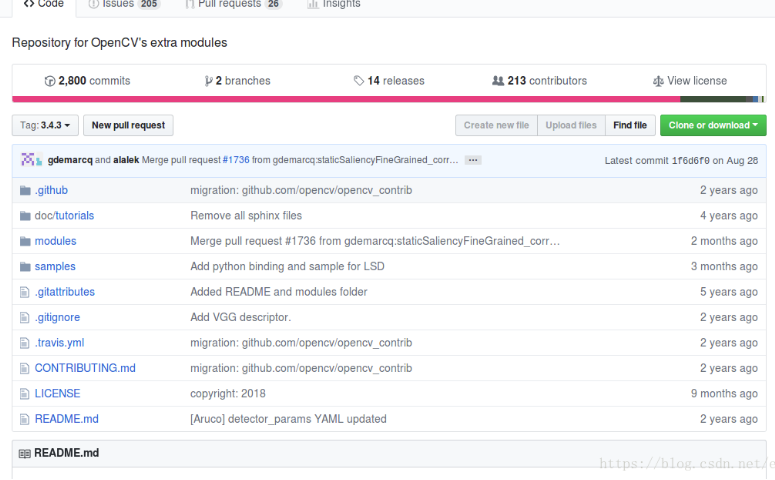
先去github上下载对应的opencv版本和opencv_contrib版本,我下载的是opencv3.4.3,所以contrib也要下载3.4.3版本。注意!版本一定一定一定一定要对应!!!
opencv版本在这[https://github.com/opencv/opencv/releases],contrib版本在这[https://github.com/opencv/opencv_contrib/tree/3.4.3],注意!要选择版本是在左上角Tag那里选。
安装完成后,把contrib文件夹放入opencv目录下,并且创建build文件夹
2.安装cmake-gui
sudo apt-get install cmake-gui
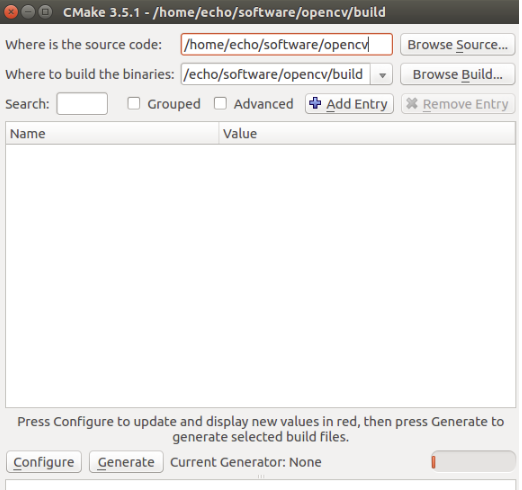
安装好之后,进入opencv文件夹里的build文件夹,在这里打开终端,输入:
cmake-gui ..
就会打开gui界面
定路径没问题之后点击configure选择Unix Makefiles,其余默认,点击finish。需要下载一些文件,要等待一段时间。然后CMake即载入默认配置,如下图所示:
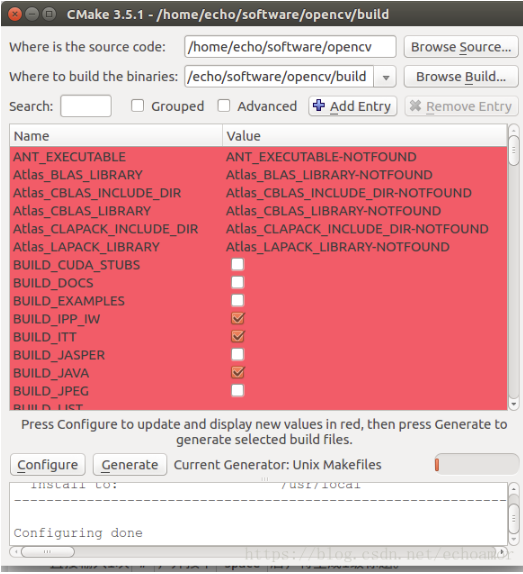
这里需要对两个地方进行修改:
(1)在CMAKE_BUILD_TYPE 值处输入RELEASE,其他保持不变(如果已经存在就不必修改)。
下方的CMAKE_INSTALL_PREFIX显示了默认的安装目录,生成makefile文件最后执行 make install时就会安装到这个目录,这里可以根据个人需求更改。但是建议就按照默认路径来,不要乱改!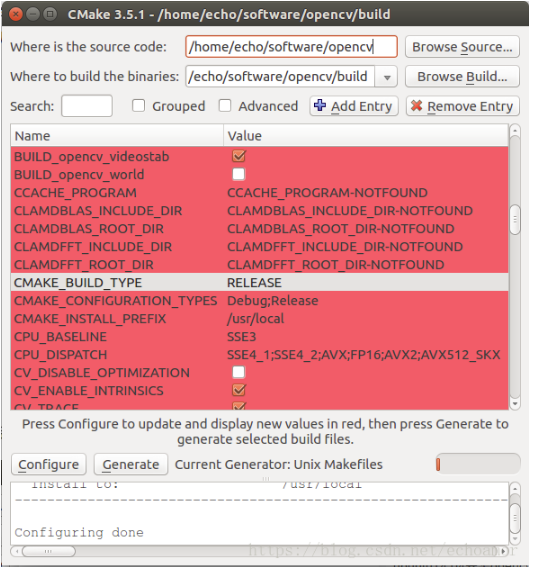
(2)在OPENCV_EXTRA_MODULES_PATH处,选择输入目录(单击这一行后方空白处即可选中)
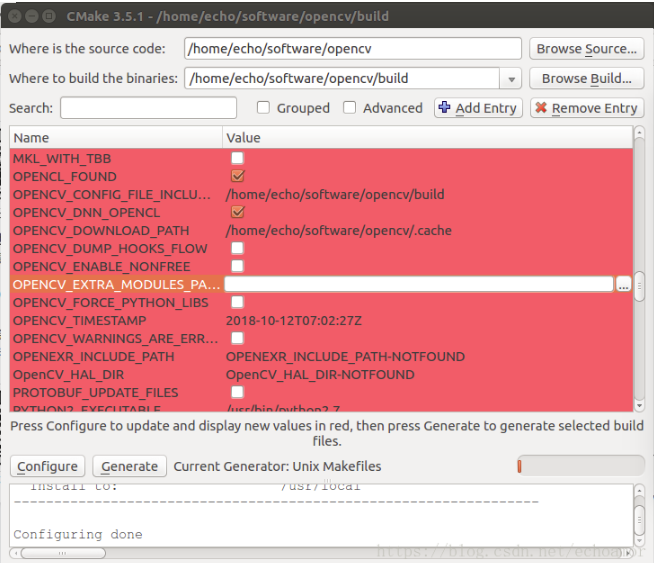
接着选择opencv_contrib文件夹中的modules文件夹,注意,不是只选中opencv_contrib文件夹就好了,需要点进去选中里面的modules文件夹! 如下图所示,我从左侧echo里进去选的,大家从自己安装位置选择就好。然后点Choose。

重新configure后,接着Generate ,这个过程需要一段时间,耐心等待一下。
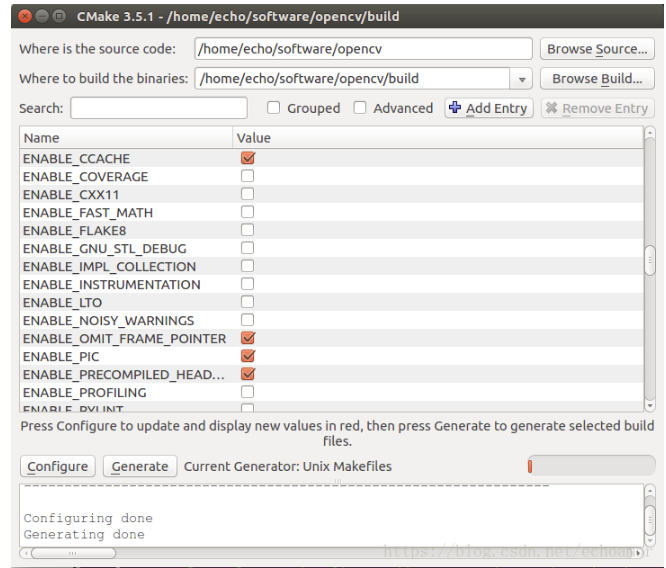
完成之后,在build文件夹下重新打开一个终端,输入make,就会开始编译,过程较长,耐心等待。
make

make install
4.配置环境变量
(1)安装成功后还需要设置opencv的环境变量。打开文件:
sudo gedit /etc/ld.so.conf.d/opencv.conf
(2)将以下内容添加到最后:
/usr/local/lib
(3)使得修改生效
sudo ldconfig
(4)更改环境变量:
sudo gedit /etc/bash.bashrc
(5)在文件后添加:
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH
保存退出,
source /etc/bash.bashrc
到这一步,opencv安装完成!
5.测试
测试1
找到
cd到opencv-3.4.1/samples/cpp/example_cmake目录下
我们可以看到这个目录里官方已经给出了一个cmake的example我们可以拿来测试下
按顺序执行
cmake .
make
./opencv_example

测试2
下面用一个小程序测试一下到底有没有装好。
在projects目录下创建一个test文件夹,复制一张图片到文件夹,比如我复制的图片名为2.jpg。
然后在test文件夹里右键创建一个test.cpp文档,代码如下:
#include <cv.h>
#include <highgui.h>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp> using namespace cv;
int main( int argc, char** argv )
{
Mat image;
image = imread( argv[1], 1 );
if( argc != 2 || !image.data )
{
printf( "No image data \n" );
return -1;
} namedWindow( "Display Image", CV_WINDOW_AUTOSIZE );
imshow( "Display Image", image );
waitKey(0);
return 0;
}
再在test目录下创建一个CMakeLists.txt 文件,内容如下,保存
project( DisplayImage )
find_package( OpenCV REQUIRED )
add_executable( DisplayImage DisplayImage )
target_link_libraries( DisplayImage ${OpenCV_LIBS} )
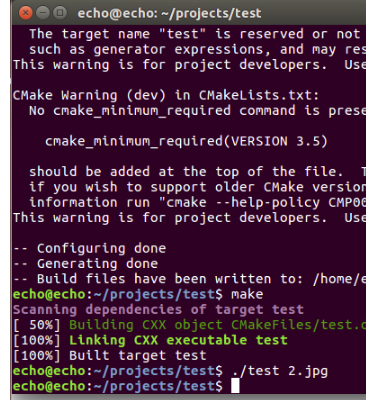
在test目录下右键打开一个终端,依次输入:
cmake .
make
注意cmake之后先打个空格再打一个点。
看到100%表示成功了,系统会自动在test文件夹下生成makefile等文件:
然后在终端输入
./test 2.jpg
安装小觅双目相机TK2 SDK
所有SDK http://www.myntai.com/cn/dev/mynteye
https://mynt-eye-s-sdk.readthedocs.io/zh_CN/latest/src/sdk/source_install_ubuntu.html
获取代码
sudo apt-get install git
git clone https://github.com/slightech/MYNT-EYE-S-SDK.git
编译并安装:
cd <sdk>
make install
最终,默认会安装在 /usr/local 目录。
编译样例
cd <sdk>
make samples
运行样例:
./samples/_output/bin/api/camera_a

工程调用
开机自启动
LINUX配置过程记录(二) 工具安装的更多相关文章
- LINUX配置过程记录
http://blog.csdn.net/Houchaoqun_XMU/article/details/78869052 64 sudo apt-get update 0 打开终端的快捷键是Ctrl+ ...
- Ubuntu16.04 安装Tensorflow1.7过程记录二:安装CUDA及Tensorflow
参考 How to install Tensorflow 1.7.0 using official pip package 其中的CUDNN应该改为7.05for CUDA9.0 后面安装的spyde ...
- 【转】android 最新 NDK r8 在window下开发环境搭建 安装配置与使用 详细图文讲解,完整实际配置过程记录(原创)
原文网址:http://www.cnblogs.com/zdz8207/archive/2012/11/27/android-ndk-install.html android 最新 NDK r8 在w ...
- android 最新 NDK r8 在window下开发环境搭建 安装配置与使用 详细图文讲解,完整实际配置过程记录(原创)
android 最新 NDK r8 在window下开发环境搭建 安装配置与使用 详细图文讲解,完整实际配置过程记录(原创) 一直想搞NDK开发却一直给其他事情耽搁了,参考了些网上的资料今天终于把 ...
- Linux (Ubuntu12.04) 下开发工具安装和使用
Linux (Ubuntu12.04) 下开发工具安装和使用 这里讲述的是关于在ubuntu12.04下面安装和使用各种IDE 开发环境和初步使用的知识.说一下背景:很多的开发基本都是在linux操作 ...
- Oracle 11g+Windows10 x64安装、配置过程记录
备注:本想在自己电脑上安装个oracle练习用,但是害怕安装过程中出现问题,而oracle的卸载又是出了名的麻烦,所以用虚拟机搭建了一个跟本机一样的系统,同时记录下安装的每一步. 环境:windows ...
- Linux的VMWare下Centos7的三种网络配置过程(网络二)
Linux之VMWare下Centos7的三种网络配置过程 环境:虚拟软件:VMWare 14.0客户机:windows 10虚拟机:centos 7 VMware三种网络连接方式 Bridge(桥接 ...
- Linux配置LNMP环境(二)配置PHP
前言:本教程安装的PHP版本php-5.6.30(官方最后更新日期2017-01-19),教程编写日期2017-07-02.本教程中的下载地址是在写教程的时候从官方复制的,时间过长可能会有变化. 安装 ...
- DRBD详细解说及配置过程记录
一.DRBD介绍 DRBD(Distributed ReplicatedBlock Device)是一种基于软件的,无共享,分布式块设备复制的存储解决方案,在服务器之间的对块设备(硬盘,分区,逻辑卷等 ...
随机推荐
- 通信(二):进程间通信之socket
一.为什么要学习socket? 我们打开浏览器浏览网页时,浏览器的进程怎么与web服务器通信的?我们用QQ聊天时,QQ进程怎么与服务器或你好友所在的QQ进程通信?这些都得靠socket.本地的进程间通 ...
- 转://IO的基础概念
磁盘IO.网络IO 对磁盘的每个IO就是在磁盘与一些RAM单元之间相互传送一些相邻的扇区的内容. 磁盘IO延时(IO Latency): 也称为IO响应时间,是指内核对磁盘发出一个 ...
- 如何用人工的方式将Excel里的一堆数字变成一个数组
目的是抛砖引玉,有谁可以教教我如何吧Excle的数据导入MyEclipse么? 如果只有⑨个字符的话我肯定是直接人工输入的,然而这次有65536行乘以3组,遭不住啊. 一.数组之间要有逗号在B列右键, ...
- requestAnimationFrame 知多少?
在Web应用中,实现动画效果的方法比较多,JavaScript 中可以通过定时器 setTimeout 来实现,css3 可以使用 transition 和 animation 来实现,html5 中 ...
- 判断JS数据类型的四种方法
在 ECMAScript 规范中,共定义了 7 种数据类型,分为 基本类型 和 引用类型 两大类,如下所示: 基本类型:String.Number.Boolean.Symbol.Undefined.N ...
- win10修改cmd默认输入法为英文
每次打开cmd窗口输入东西后,按下空格,输入的英文就会变为中文,感觉十分不爽,网上找了很多解决办法,由于系统升级了,都没有效果,今天记录一下解决方法: 1.点击任务栏输入法,打开“语言首选项”,如图: ...
- SDL 开发实战(七): SDL 多线程与锁机制
为什么要用多线程?在音视频领域主要是实现音视频同步.实现了音视频同步,我们的播放器就基本上合格了. 这里我们将讲解一下SDL的多线程与锁机制. 多线程的好处主要是能使程序更加充分利用硬件(主要是CPU ...
- 7.Flask文件上传
1.1.上传文件和访问上传的文件 upload_file_demo.py from flask import Flask,request,render_template import os from ...
- The connection to the server localhost:8080 was refused - did you specify the right host or port?
The connection to the server localhost:8080 was refused - did you specify the right host or port? 解决 ...
- 一段JAVA代码了解多线程,JUC、CAS原子性操作。
@Test public void testPaceController_multiThread() throws InterruptedException { final PaceControlle ...