张高兴的 .NET Core IoT 入门指南:(五)PWM 信号输出
什么是 PWM
在解释 PWM 之前首先来了解一下电路中信号的概念,其中包括模拟信号和数字信号。模拟信号是一种连续的信号,与连续函数类似,在图形上表现为一条不间断的连续曲线。数字信号为只能取有限个数值的信号,比如计算机中的高电平(1)和低电平(0)。
PWM(Pulse Width Modulation)即脉冲宽度调制,简称脉宽调制,通过对一系列的脉冲的宽度进行调制,从而等效出所需要的模拟信号。如图 1 所示,蓝色波形为调制的一系列脉冲,红色波形为模拟的正弦样信号。在模拟电路中,模拟信号的值可以连续进行变化,而数字电路是在高电平和低电平中取值,所以电压或电流会以脉冲的形式出现。通过使用 PWM 技术,我们可以在数字电路中模拟出电信号的连续变化。
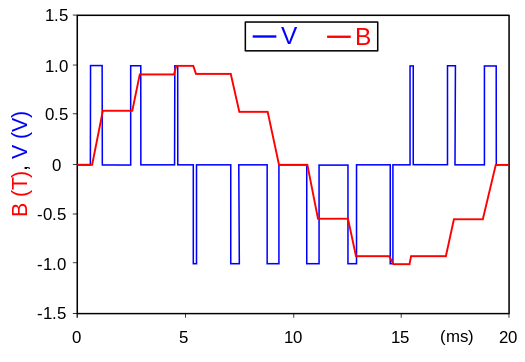
图1:PWM 示意图
{kind=link}
提示
看完上面的如果你还不明白,那么可以看看下面这个生动的解释,这个解释来源于百度知道:
“简单的说,比如你有5V电源,要控制一台灯的亮度,有一个传统办法,就是串联一个可调电阻,改变电阻,灯的亮度就会改变。还有一个办法,就是PWM调节。不用串联电阻,而是串联一个开关。假设在1秒内,有0.5秒的时间开关是打开的,0.5秒关闭,那么灯就亮0.5秒,灭0.5秒。这样持续下去,灯就会闪烁。如果把频率调高一点,比如是1毫秒,0.5毫秒开,0.5毫秒灭,那么灯的闪烁频率就很高。我们知道,闪烁频率超过一定值,人眼就会感觉不到。所以,这时你看不到灯的闪烁,只看到灯的亮度只有原来的一半。同理,如果1毫秒内,0.1毫秒开,0.9毫秒灭,那么,灯的亮度就只有原来的10分之一。”
使用 PWM 需要了解占空比(Duty Cycle)和频率(Frequency)的概念。占空比即 PWM 信号在一个周期内处于高电平的时间与整个周期的时间的比值。在 5V 电源的情况下,想要产生一个 3V 的信号,可以使用占空比为 60% 的 PWM。图 2 从波形的角度解释了 PWM。频率是 PWM 信号在 1 秒内完成一个周期的次数,单位是 Hz。如果输出的频率够高并保持一定的占空比,就可以模拟出恒定电压。图 3 对比了小灯亮度的变化与占空比的变化,通过观察图右侧的 PWM 波形可以看到占空比越高小灯越亮。
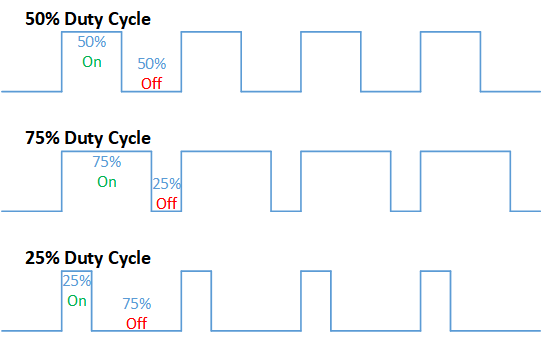
图2:占空比示意图
{kind=link}
图3:小灯亮度变化与占空比变化对比
Raspberry Pi 上提供了硬件 PWM 功能,一共包括 2 个通道,引出了 4 个 GPIO 引脚。其中 GPIO 12 和 GPIO 18 属于通道 0,GPIO 13 和 GPIO 19 属于通道 1。但有意思的是只有通道 0 的 GPIO 18 引脚的默认功能为 PWM,其他的不是被音频处理所占用,就是引脚另有它用。启用这些引脚需要进行一些特殊配置甚至内核编程。
提示
如何启用 Raspberry Pi 上的 PWM ?
修改 /boot/config.txt ,添加 dtoverlay=pwm 。
启用 PWM 通道 1 请参考:https://github.com/raspberrypi/firmware/issues/1178
修改 GPIO 引脚功能请参考:https://www.dummies.com/computers/raspberry-pi/raspberry-pi-gpio-pin-alternate-functions 和 http://abyz.me.uk/rpi/pigpio/pigs.html
相关类
PWM 操作的相关类位于 System.Device.Pwm 命名空间下。
PwmChannel
public class PwmChannel : IDisposable
{
// 创建 PwmChannel 对象
// chip 为 PWM 芯片编号,Linux 下位于 /sys/class/pwm 文件夹下
// channel 为 通道编号
public static PwmChannel Create(int chip, int channel, int frequency = 400, double dutyCycle = 0.5);
// 占空比,取值为 0.0 - 1.0
public double DutyCycle { get; set; }
// 频率,单位为 Hz
public int Frequency { get; set; }
// 打开和关闭 PWM 通道
public void Start();
public void Stop();
}
PWM 的使用步骤
- 实例化一个 PwmChannel 对象
PwmChannel pwm = PwmChannel.Create(chip: 0, channel: 0, frequency: 400, dutyCycle: 0);
- 打开 PWM 通道
pwm.Start();
- 设置占空比/频率改变输出的 PWM 信号
pwm.DutyCycle = 0.5;
- 关闭 PWM 通道
pwm.Stop();
使用硬件 PWM 控制 LED 的亮度
硬件需求
| 名称 | 数量 |
|---|---|
| LED | x1 |
| 220 Ω 电阻 | x1 |
| 杜邦线 | 若干 |
电路
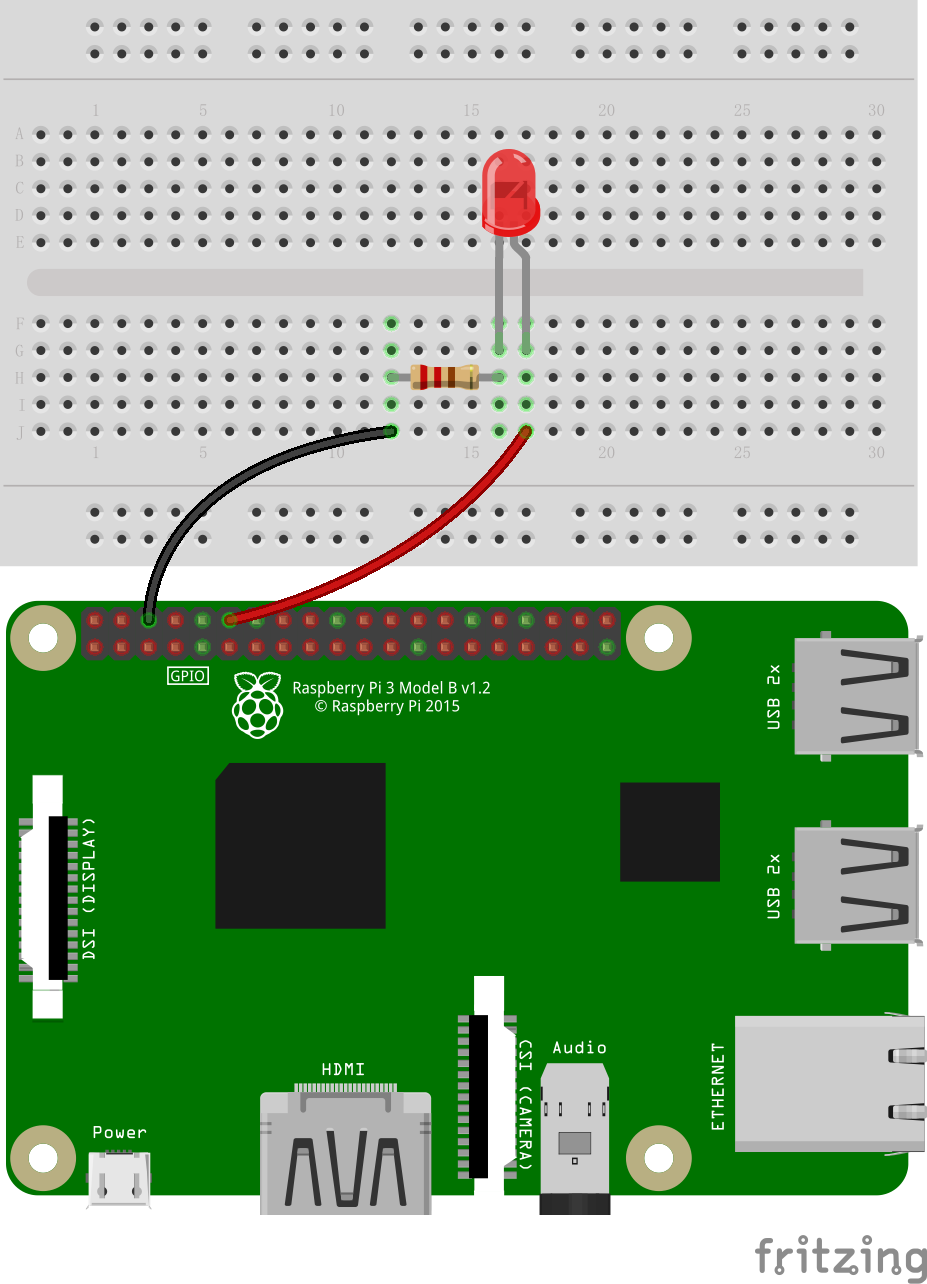
- LED 正极 - GPIO 18 (Pin 12)
- LED 负极 - GND
使用 Docker 运行示例
示例地址:https://github.com/ZhangGaoxing/dotnet-core-iot-demo/tree/master/src/PwmLed
docker build -t pwm-led-sample -f Dockerfile .
docker run --rm -it -v=/sys/class/pwm:/sys/class/pwm --privileged=true pwm-led-sample
代码
- 打开 Visual Studio ,新建一个 .NET Core 控制台应用程序,项目名称为“PwmLed”。
- 引入 System.Device.Gpio NuGet 包。
- 在 Program.cs 中,将主函数代码替换如下:
static void Main(string[] args)
{
int brightness = 0;
using PwmChannel pwm = PwmChannel.Create(chip: 0, channel: 0, frequency: 400, dutyCycle: 0);
pwm.Start();
while (brightness != 255)
{
pwm.DutyCycle = brightness / 255D;
brightness++;
Thread.Sleep(10);
}
while (brightness != 0)
{
pwm.DutyCycle = brightness / 255D;
brightness--;
Thread.Sleep(10);
}
pwm.Stop();
}
- 发布、拷贝、更改权限、运行
效果图
使用软件 PWM 控制 RGB LED
上面提到 Raspberry Pi 中默认只有 GPIO 18 这一个引脚可以使用 PWM,要控制 RGB LED 则至少需要使用 3 个 PWM,这显然是不够用的。在 Iot.Device.Bindings 这个 NuGet 包中为我们提供了使用 GPIO 模拟的软件 PWM 类 SoftwarePwmChannel 。软件 PWM 的使用效果并没有硬件 PWM 的那种“顺滑”,因为其精度完全取决于 GPIO 的速度。
提示
RGB LED 有三种颜色,但通常只有 4 个引脚,而三种单色 LED 却有 6 个引脚,为什么会少了 2 个引脚?RGB LED 分为共阳极和共阴极。如果少的两个引脚为阳极,则为共阳极 RGB LED,三个单色 LED 共用一个阳极,剩下的三个引脚为各自的阴极。共阴极 RGB LED 则相反。两种 LED 在使用上类似,但程序相反,比如共阴极时占空比越高 LED 越亮,而共阳极时,占空比越高则 LED 越暗。
硬件需求
| 名称 | 数量 |
|---|---|
| RGB LED | x1 |
| 220 Ω 电阻 | x3 |
| 杜邦线 | 若干 |
电路

- LED R - GPIO 18 (Pin 12)
- LED G - GPIO 23 (Pin 16)
- LED B - GPIO 24 (Pin 18)
- LED 阴极 - GND
使用 Docker 运行示例
示例地址:https://github.com/ZhangGaoxing/dotnet-core-iot-demo/tree/master/src/PwmRgb
docker build -t pwm-rgb-sample -f Dockerfile .
docker run --rm -it --device /dev/gpiomem pwm-rgb-sample
代码
- 打开 Visual Studio ,新建一个 .NET Core 控制台应用程序,项目名称为“PwmRgb”。
- 引入 Iot.Device.Bindings NuGet 包。
- 在 Program.cs 中,将主函数代码替换如下:
static void Main(string[] args)
{
using PwmChannel red = new SoftwarePwmChannel(pinNumber: 18, frequency: 400, dutyCycle: 0);
using PwmChannel green = new SoftwarePwmChannel(pinNumber: 23, frequency: 400, dutyCycle: 0);
using PwmChannel blue = new SoftwarePwmChannel(pinNumber: 24, frequency: 400, dutyCycle: 0);
red.Start();
green.Start();
blue.Start();
Breath(red, green, blue);
red.Stop();
green.Stop();
blue.Stop();
}
public static void Breath(PwmChannel red, PwmChannel green, PwmChannel blue)
{
int r = 255, g = 0, b = 0;
while (r != 0 && g != 255)
{
red.DutyCycle = r / 255D;
green.DutyCycle = g / 255D;
r--;
g++;
Thread.Sleep(10);
}
while (g != 0 && b != 255)
{
green.DutyCycle = g / 255D;
blue.DutyCycle = b / 255D;
g--;
b++;
Thread.Sleep(10);
}
while (b != 0 && r != 255)
{
blue.DutyCycle = b / 255D;
red.DutyCycle = r / 255D;
b--;
r++;
Thread.Sleep(10);
}
}
- 发布、拷贝、更改权限、运行
效果图
供参考
- Pulse-width modulation - Wikipedia:https://en.wikipedia.org/wiki/Pulse-width_modulation
- RPI4 : PWM0 & PWM1 Alternate pins - GitHub:https://github.com/raspberrypi/firmware/issues/1178
- Raspberry Pi GPIO Pin Alternate Functions:https://www.dummies.com/computers/raspberry-pi/raspberry-pi-gpio-pin-alternate-functions/
- PWM source code:https://github.com/dotnet/iot/tree/master/src/System.Device.Gpio/System/Device/Pwm
- 脉冲宽度调制 - 百度百科:https://baike.baidu.com/item/脉冲宽度调制/10813756
张高兴的 .NET Core IoT 入门指南:(五)PWM 信号输出的更多相关文章
- 张高兴的 .NET Core IoT 入门指南:(二)GPIO 的使用
什么是 GPIO GPIO 是 General Purpose Input Output 的缩写,即"通用输入输出". Raspberry Pi 有两行 GPIO 引脚, Rasp ...
- 张高兴的 .NET Core IoT 入门指南:(一)环境配置、Blink、部署
如何在 Raspberry Pi 的 Raspbian 上构建使用 GPIO 引脚的 IoT 程序?你可能会回答使用 C++ 或 Python 去访问 Raspberry Pi 的引脚.现在,C# 程 ...
- 张高兴的 .NET Core IoT 入门指南:(四)使用 SPI 进行通信
什么是 SPI 和上一篇文章的 I2C 总线一样,SPI(Serial Peripheral Interface,串行外设接口)也是设备与设备间通信方式的一种.SPI 是一种全双工(数据可以两个方向同 ...
- 张高兴的 .NET Core IoT 入门指南:(三)使用 I2C 进行通信
什么是 I2C 总线 I2C 总线(Inter-Integrated Circuit Bus)是设备与设备间通信方式的一种.它是一种串行通信总线,由飞利浦公司在1980年代为了让主板.嵌入式系统或手机 ...
- 张高兴的 .NET Core IoT 入门指南:(五)串口通信入门
在开始之前,首先要说明的是串口通信所用到的 SerialPort 类并不包含在 System.Device.Gpio NuGet 包中,而是在 System.IO.Ports NuGet 包中.之所以 ...
- 张高兴的 .NET IoT 入门指南:(七)制作一个气象站
距离上一篇<张高兴的 .NET Core IoT 入门指南>系列博客的发布已经过去 2 年的时间了,2 年的时间 .NET 版本发生了巨大的变化,.NET Core 也已不复存在,因此本系 ...
- 张高兴的 .NET IoT 入门指南:(八)基于 GPS 的 NTP 时间同步服务器
时间究竟是什么?这既可以是一个哲学问题,也可以是一个物理问题.古人对太阳进行观测,利用太阳的投影发明了日晷,定义了最初的时间.随着科技的发展,天文观测的精度也越来越准确,人们发现地球的自转并不是完全一 ...
- 【VB超简单入门】五、基本输出输入
之前讲了VB IDE的基本操作和概念,接下来要开始将VB语言的编程了. 程序最重要的部分是输出和输入,输入数据,经过计算机处理,再输出结果.本文将介绍两种最基本的输出输入方法,分别是Print.Msg ...
- OpenCV入门指南----人脸检测
本篇介绍图像处理与模式识别中最热门的一个领域——人脸检测(人脸识别).人脸检测可以说是学术界的宠儿,在不少EI,SCI高级别论文都能看到它的身影.甚至很多高校学生的毕业设计都会涉及到人脸检测.当然人脸 ...
随机推荐
- Hadoop点滴-外围概念
有句话说的好“大数据胜于好算法” 硬盘存储容量在不断提升的同时,访问速度(硬盘数据读取速度)却没有同步增长:1990年,访问全盘需要5分钟,20年后,需要2.5小时 不同的业务大数据,存储在一套HDF ...
- UML图标含义及记忆方法
记忆技巧: 箭头的一方为被动方(被调用者): 箭头的端点为主动方(调用者). 箭头为封闭三角形时,表示类间关系 箭头为半封闭尖括号时,表示类内关系.其中,虚线表示参数强制依赖关系,实线表示属性关系.一 ...
- Mycat 配置文件server.xml
server.xml 几乎保存了所有 mycat 需要的系统配置信息. 1.system 标签: 该标签内嵌套的所有 property 标签都与系统配置有关. charset 属性: 该属性用于字符集 ...
- Python简单的抓取静态网页内容
import requests from bs4 import BeautifulSoup res = requests.get('http://news.sina.com.cn/china/')#获 ...
- jQuery常用方法(四)-选择器
JQuery Selectors 方法说明 基本选择器 $("#myDiv") 匹配唯一的具有此id值的元素 $("div") 匹配指定名称的所有元素 $(&q ...
- bugku—Web_Writeup
Bugku_Web_Writeup Writeup略显粗糙~~ 部分Web题没有得到最后的flag~只是有了一个简单的思路~~ Web1: 如上,打开题目答题网址后就会弹出一张图片,看图片就可以发现是 ...
- php EOF(heredoc)使用
PHP EOF(heredoc)是一种在命令行shell(如sh.csh.ksh.bash.PowerShell和zsh)和程序语言(像Perl.PHP.Python和Ruby)里定义一个字符串的方法 ...
- Shell之Function与Source
目录 Shell之Function与Source 参考 Fuction的编写 Source的使用 Shell之Function与Source
- layload.js的使用
网上有人反映说lazyload只是效果好看并没有实现真正的懒加载,在后台仍然是把页面上的所有图片下了一遍,只不过是先把图片隐藏并在窗口向下滚动时再逐一显示出来罢了.lazyloag3经测试这个问题已经 ...
- 从零开始的vue学习笔记(二)
数据与方法 当一个 Vue 实例被创建时,它将 data 对象中的所有的属性加入到 Vue 的响应式系统中.data的数据和视图同步更新. 实例创建后添加一个新的属性,对这个属性的的改动将不会触发任何 ...