彻底分析虚拟视频驱动vivi(三)
在Ubuntu系统中接上usb摄像头设备时,系统会自动安装对应的usb设备驱动程序。
我们现在要使用自己编译的vivi驱动,该怎么办呢?
1.先安装系统自带的vivi驱动和它所依赖的所有驱动:sudo modprobe vivi ;
2.卸载原有的vivi驱动 : sudo rmmod vivi ;
3.装载自己的驱动 :sudo insmod ./vivi.ko ;
然后 ls /dev/video* ,可以看到有一个video设备节点 /dev/video0 ,即对应的是vivi虚拟出来的视频设备。
我们可以直接阅读xawtv源码,从main函数开始一路分析它调用vivi驱动的过程,但是这个过程会非常漫长,因为它除了调用vivi驱动之外
,还会做许多其他的准备工作。我们可以通过strace 这个命令来跟踪调用过程。
本文目的:
(通过追踪应用程序xawtv调用驱动vivi的过程,使之生成对应的TXT文件,在文件中搜索 /dev/video*字段,得到一系列函数,再打开xawtv源码,得到vivi驱动必须的系统调用,进而分析驱动框架)
一、xawtv所涉及的vivi驱动的系统调用
使用方法 :执行 strace -o xawtv.txt xawtv ,生成了调用过程xawtv.txt
搜索 /dev/video0,得到如下:
open("/dev/video0", O_RDWR|O_LARGEFILE) = 4
ioctl(4, VIDIOC_QUERYCAP or VT_OPENQRY, 0x95b8998) = -1 EINVAL (Invalid argument)
close(4) = 0
open("/dev/video0", O_RDWR|O_LARGEFILE) = 4
.....
发现打开了两次,open成功之后得到file_fd =4,后面有一大堆ioctl,把所有的ioctl列举出来,即可得到ioctl的过程:
open("/dev/video0", O_RDWR|O_LARGEFILE) =
ioctl(, VIDIOC_QUERYCAP or VT_OPENQRY, 0xbff6c704) =
ioctl(, VIDIOC_G_FMT or VT_SENDSIG, 0xbff6c638) =
ioctl(, VIDIOC_ENUM_FMT or VT_SETMODE, 0xbff6c5ac) =
ioctl(, 0xc02c564a, 0xbff6c518) = - EINVAL (Invalid argument)
ioctl(, VIDIOC_ENUM_FMT or VT_SETMODE, 0xbff6c5ac) =
ioctl(, 0xc02c564a, 0xbff6c518) = - EINVAL (Invalid argument)
ioctl(, VIDIOC_ENUM_FMT or VT_SETMODE, 0xbff6c5ac) =
ioctl(, 0xc02c564a, 0xbff6c518) = - EINVAL (Invalid argument)
ioctl(, VIDIOC_ENUM_FMT or VT_SETMODE, 0xbff6c5ac) =
ioctl(, VIDIOC_ENUM_FMT or VT_SETMODE, 0xbff6c5ac) =
ioctl(, VIDIOC_ENUM_FMT or VT_SETMODE, 0xbff6c5ac) =
ioctl(, VIDIOC_ENUM_FMT or VT_SETMODE, 0xbff6c5ac) = - EINVAL (Invalid argument)
ioctl(, VIDIOC_QUERYCAP or VT_OPENQRY, 0xbff6c544) =
ioctl(, VIDIOC_G_INPUT, 0xbff6c3ec) =
ioctl(, VIDIOC_ENUMINPUT, 0xbff6c3ec) =
xawtv涉及的vivi驱动的系统调用:
// 1~7都是在v4l2_open里调用
. open
. ioctl(, VIDIOC_QUERYCAP // 3~7 都是在get_device_capabilities里调用
. for()
ioctl(, VIDIOC_ENUMINPUT // 列举输入源,VIDIOC_ENUMINPUT/VIDIOC_G_INPUT/VIDIOC_S_INPUT不是必需的
. for()
ioctl(, VIDIOC_ENUMSTD // 列举标准(制式), 不是必需的
. for()
ioctl(, VIDIOC_ENUM_FMT // 列举格式 . ioctl(, VIDIOC_G_PARM
. for()
ioctl(, VIDIOC_QUERYCTRL // 查询属性(比如说亮度值最小值、最大值、默认值) // 8~10都是通过v4l2_read_attr来调用的
. ioctl(, VIDIOC_G_STD // 获得当前使用的标准(制式), 不是必需的
. ioctl(, VIDIOC_G_INPUT
. ioctl(, VIDIOC_G_CTRL // 获得当前属性, 比如亮度是多少 . ioctl(, VIDIOC_TRY_FMT // 试试能否支持某种格式
. ioctl(, VIDIOC_S_FMT // 设置摄像头使用某种格式 // 13~16在v4l2_start_streaming
. ioctl(, VIDIOC_REQBUFS // 请求系统分配缓冲区
. for()
ioctl(, VIDIOC_QUERYBUF // 查询所分配的缓冲区
mmap
. for ()
ioctl(, VIDIOC_QBUF // 把缓冲区放入队列
. ioctl(, VIDIOC_STREAMON // 启动摄像头 // 17里都是通过v4l2_write_attr来调用的
. for ()
ioctl(, VIDIOC_S_CTRL // 设置属性
ioctl(, VIDIOC_S_INPUT // 设置输入源
ioctl(, VIDIOC_S_STD // 设置标准(制式), 不是必需的 // v4l2_nextframe > v4l2_waiton
. v4l2_queue_all
v4l2_waiton
for ()
{
select(, [], NULL, NULL, {, }) = (in [], left {, })
ioctl(, VIDIOC_DQBUF // de-queue, 把缓冲区从队列中取出
// 处理, 之以已经通过mmap获得了缓冲区的地址, 就可以直接访问数据
ioctl(, VIDIOC_QBUF // 把缓冲区放入队列
}
由上可知xawtv的几大函数:
1. v4l2_open
2. v4l2_read_attr/v4l2_write_attr
3. v4l2_start_streaming
4. v4l2_nextframe/v4l2_waiton
摄像头驱动程序必需的11个ioctl:
// 表示它是一个摄像头设备
.vidioc_querycap = vidioc_querycap, /* 用于列举、获得、测试、设置摄像头的数据的格式 */
.vidioc_enum_fmt_vid_cap = vidioc_enum_fmt_vid_cap,
.vidioc_g_fmt_vid_cap = vidioc_g_fmt_vid_cap,
.vidioc_try_fmt_vid_cap = vidioc_try_fmt_vid_cap,
.vidioc_s_fmt_vid_cap = vidioc_s_fmt_vid_cap, /* 缓冲区操作: 申请/查询/放入队列/取出队列 */
.vidioc_reqbufs = vidioc_reqbufs,
.vidioc_querybuf = vidioc_querybuf,
.vidioc_qbuf = vidioc_qbuf,
.vidioc_dqbuf = vidioc_dqbuf, // 启动/停止
.vidioc_streamon = vidioc_streamon,
.vidioc_streamoff = vidioc_streamoff,
分析数据的获取过程:
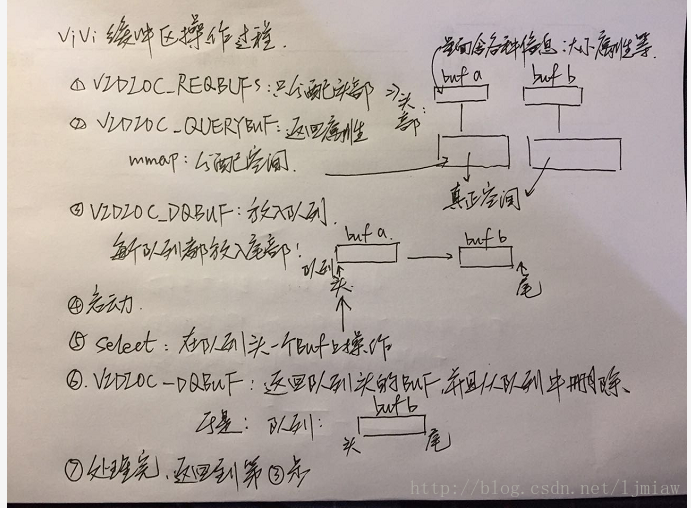
. 请求分配缓冲区: ioctl(, VIDIOC_REQBUFS // 请求系统分配缓冲区
videobuf_reqbufs(队列, v4l2_requestbuffers) // 队列在open函数用videobuf_queue_vmalloc_init初始化
// 注意:这个IOCTL只是分配缓冲区的头部信息,真正的缓存还没有分配呢
//在驱动程序有一条原则,这些资源只有在我们用到的时候才进行分配
. 查询映射缓冲区:
ioctl(, VIDIOC_QUERYBUF // 查询所分配的缓冲区
videobuf_querybuf // 获得缓冲区的数据格式、每一行长度、高度、缓冲区使用状态、在内核空间的偏移地址、缓冲区长度等
mmap(参数里有"大小") // 在这里才分配缓存
v4l2_mmap
vivi_mmap
videobuf_mmap_mapper
videobuf-vmalloc.c里的__videobuf_mmap_mapper
mem->vmalloc = vmalloc_user(pages); // 在这里才给缓冲区分配空间 . 把缓冲区放入队列:
ioctl(, VIDIOC_QBUF // 把缓冲区放入队列
videobuf_qbuf
q->ops->buf_prepare(q, buf, field); // 调用驱动程序提供的函数做些预处理
list_add_tail(&buf->stream, &q->stream); // 把缓冲区放入队列的尾部
q->ops->buf_queue(q, buf); // 调用驱动程序提供的"入队列函数" . 启动摄像头
ioctl(, VIDIOC_STREAMON
videobuf_streamon
q->streaming = ; . 用select查询是否有数据
// 驱动程序里必定有: 产生数据、唤醒进程
v4l2_poll
vdev->fops->poll
vivi_poll
videobuf_poll_stream
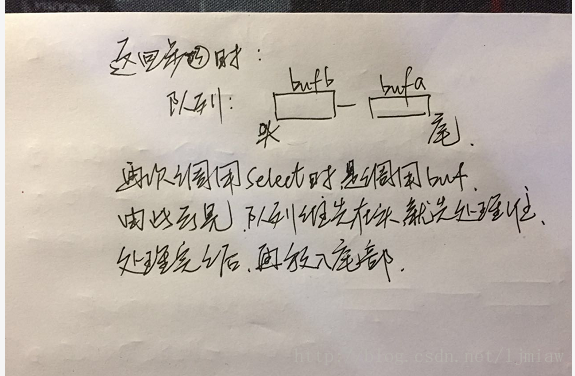
// 从队列的头部获得缓冲区
buf = list_entry(q->stream.next, struct videobuf_buffer, stream); // 如果没有数据则休眠,在buf->done这里进行休眠
poll_wait(file, &buf->done, wait); 谁来产生数据、谁来唤醒它?
内核线程vivi_thread每30MS执行一次,它调用
vivi_thread_tick
vivi_fillbuff(fh, buf); // 构造数据
wake_up(&buf->vb.done); // 唤醒进程 . 有数据后从队列里取出缓冲区
// 有那么多缓冲区,APP如何知道哪一个缓冲区有数据?调用VIDIOC_DQBUF
ioctl(, VIDIOC_DQBUF
vidioc_dqbuf
// 在队列里获得有数据的缓冲区
retval = stream_next_buffer(q, &buf, nonblocking); // 把它从队列中删掉
list_del(&buf->stream); // 把这个缓冲区的状态返回给APP
videobuf_status(q, b, buf, q->type); . 应用程序根据VIDIOC_DQBUF所得到缓冲区状态,知道是哪一个缓冲区有数据
就去读对应的地址(该地址来自前面的mmap)
总结数据获取过程:(图片来自:https://blog.csdn.net/ljmiaw/article/details/72801456)
怎么写摄像头驱动程序:
1. 分配video_device:video_device_alloc
2. 设置
.fops
.ioctl_ops (里面需要设置11项)
如果要用内核提供的缓冲区操作函数,还需要构造一个videobuf_queue_ops
3. 注册: video_register_device
怎么写摄像头驱动程序:
1. 分配video_device:video_device_alloc
2. 设置 .fops .ioctl_ops (里面需要设置11项) 如果要用内核提供的缓冲区操作函数,还需要构造一个videobuf_queue_ops
3. 注册: video_register_device
彻底分析虚拟视频驱动vivi(三)的更多相关文章
- V4L2(二)虚拟摄像头驱动vivi深入分析【转】
转自:http://www.cnblogs.com/tureno/articles/6694463.html 转载于: http://blog.csdn.net/lizuobin2/article/d ...
- 初识V4L2(三)-------分析vivi.c 虚拟视频驱动
1.分配video_device结构体 2.设置 3.注册 video_register_device 分析vivi.c: vivi_init( )//入口函数 vivi_create_instan ...
- 2.2 vivi虚拟视频驱动测试
学习目标:在linux终端安装xawtv,并测试vivi.ko驱动程序. 一.安装xawtv 1)ubuntu能上网情况下,使用命令:# sudo apt-get install xawtv 2)如果 ...
- 二十四、V4L2框架主要结构体分析和虚拟摄像头驱动编写
一.V4L2框架主要结构体分析 V4L2(video for linux version 2),是内核中视频设备的驱动框架,为上层访问视频设备提供统一接口. V4L2整体框架如下图: 图中主要包括两层 ...
- V4L2学习(五)VIVI虚拟摄像头驱动
概述 前面简单分析了内核中虚拟摄像头驱动 vivi 的框架与实现,本文参考 vivi 来写一个虚拟摄像头驱动,查询.设置视频格式相对简单,难点在于 vb2_buf 的处理过程. 数据采集流程分析 在我 ...
- 初始v4l2(六)-------根据虚拟驱动vivi的使用彻底分析摄像头驱动
前面的几篇文章已经分析了v4l2的框架,对框架的分析是比较粗浅的,能基本清楚函数之间的调用过程.但是很多内容并没有分析,比如说里面有很多ioctl,并没有分析哪些ioctl是必须的,也没有分析如何从应 ...
- 通过虚拟驱动vivi分析摄像头驱动
Linux摄像头驱动学习之:(二)通过虚拟驱动vivi分析摄像头驱动 一.通过指令 "strace -o xawtv.log xawtv" 得到以下调用信息: // 1~7都是在v ...
- Android IOS WebRTC 音视频开发总结(六六)-- 三个角度分析美女视频直播这个行业
本文主要从用户,公司和技术角度分析美女视频直播这个行业,文章最早发表在我们的微信公众号上,支持原创,详见这里, 欢迎关注微信公众号blackerteam,更多详见www.rtc.help 美女视频直播 ...
- Linux内核分析(四)----进程管理|网络子系统|虚拟文件系统|驱动简介
原文:Linux内核分析(四)----进程管理|网络子系统|虚拟文件系统|驱动简介 Linux内核分析(四) 两天没有更新了,上次博文我们分析了linux的内存管理子系统,本来我不想对接下来的进程管理 ...
随机推荐
- TCP/IP、UDP、 Http、Socket的差别
网络由上往下分为: 表示层和应用层 :HTTP协议(基于传输层的TCP协议,主要解决怎样包装数据) 会话层 传输层: TCP协议(基于网络层的IP协议).TPC/IP协议(主要解决数据怎样在网络中传输 ...
- 删除heroku上的数据库记录
部署本地项目到heroku上.在线上插入数据到数据库,本地代码再次更新到heroku,线上的数据记录还存在单是图片丢失.问题还没有解决: 本地代码和heroku代码怎样同步? heroku使用的pg和 ...
- nj03---阻塞和线程
Node.js最大的特性就是"异步式I/O"与事件紧密结合的编程模式.这种模式与传统的同步式IO线性的编程思路有很大的不同,因为控制流很大程度上要靠"事件"和& ...
- 英语音乐---三、Cry on my shoulder
英语音乐---三.Cry on my shoulder 一.总结 一句话总结:Cry on my shoulder 在我的肩膀上哭泣 1.If the hero never comes to you. ...
- [JZOJ4024] [佛山市选2015] 石子游戏 解题报告
Description Alice 和 Bob 总喜欢聚在一起玩游戏(T_T),今天他(她)们玩的是一款新型的取石子游戏.游戏一开始有N堆石子,Alice 和 Bob 轮流取出石子.在每次操作 ...
- [NOI2002] Savage 解题报告(扩展欧几里得)
题目链接:https://www.lydsy.com/JudgeOnline/problem.php?id=1407 Description 克里特岛以野人群居而著称.岛上有排列成环行的M个山洞.这些 ...
- C语言基础-第三章
C语句和数据输入/输出(函数) 1.printf();输出函数 2.getch();输入函数 3.scanf();格式输入 4.puts();字符串输出 5.gets();字符串输入
- Linux环境下源码安装PostgreSQL
1.下载PostgreSQL源码包,并保存到Linux操作系统的一个目录下 2.解压PostgreSQL源码包 :tar zxvf postgresql-9.2.4.tar.gz 或 tar jxvf ...
- 12 条实用的 zypper 命令范例 (转载)
12 条实用的 zypper 命令范例 作者: Kerneltalks 译者: LCTT cycoe | 2018-12-12 13:29 zypper 是 Suse Linux 系统的包和补丁管理器 ...
- 列表的所有的input,将它的值以键值对的形式存放到一个数组里
要求的格式 代码块 $('.btn-confirm').on('tap',function(){ var arr={}; var name = $("input[name='insuranc ...