ZYNQ Linux 移植:包含petalinux移植和手动移植debian9
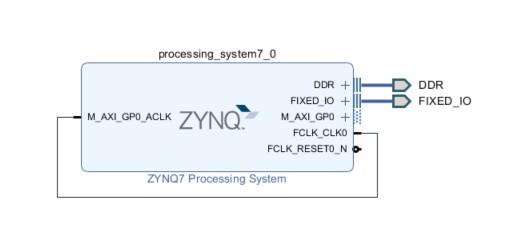
- 建立BSP:
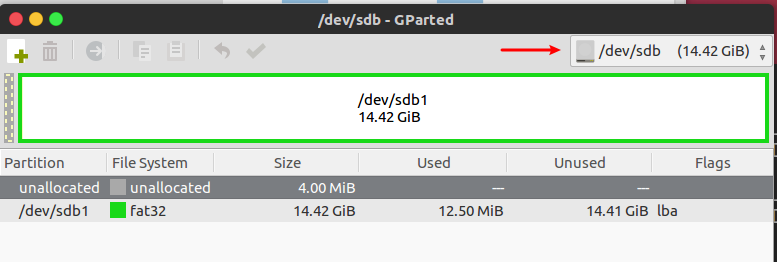
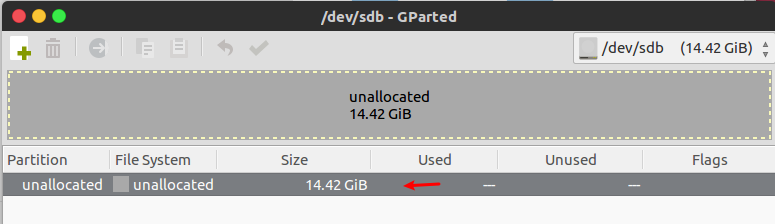
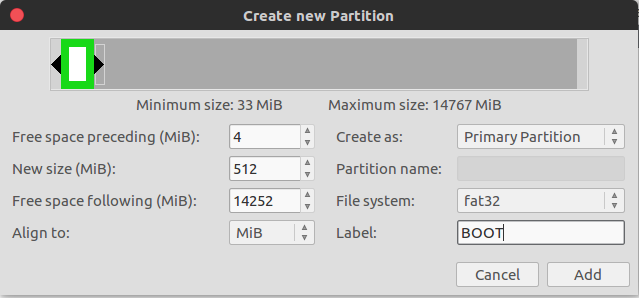
- SD卡分区:本次移植u-boot、kernel、rootfs都在SD上。


source /home/kingstacker/petalinux2018.3/settings.sh
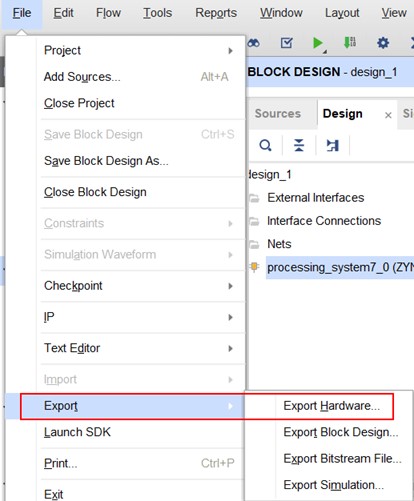
petalinux-create -t project -n demo1_linux --template zynqcd demo1_linux/petalinux-config --get-hw-description=/home/kingstacker/demo_linux/project_1.sdk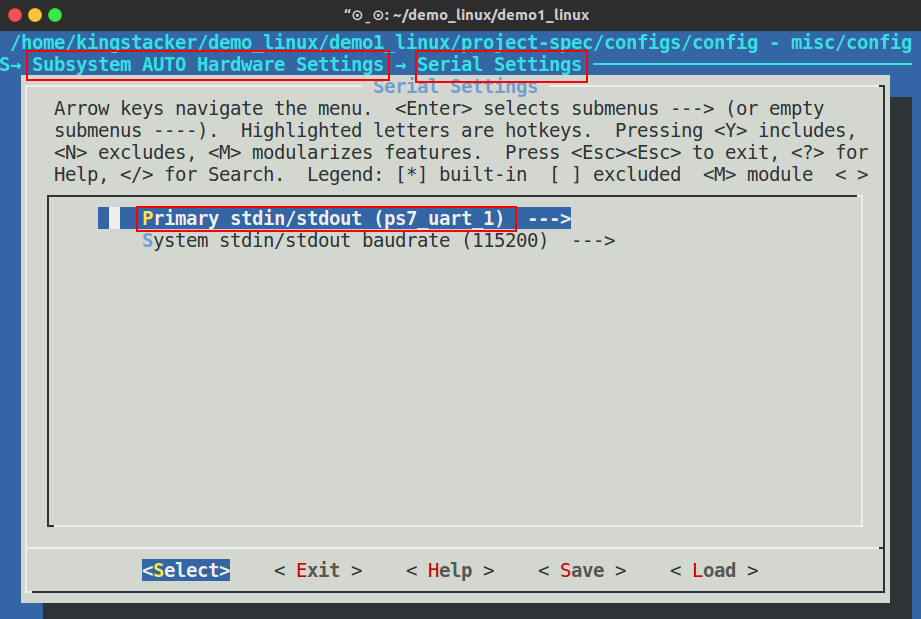
console=ttyPS0,115200 root=/dev/mmcblk0p2 rw earlyprintk rootfstype=ext4 rootwait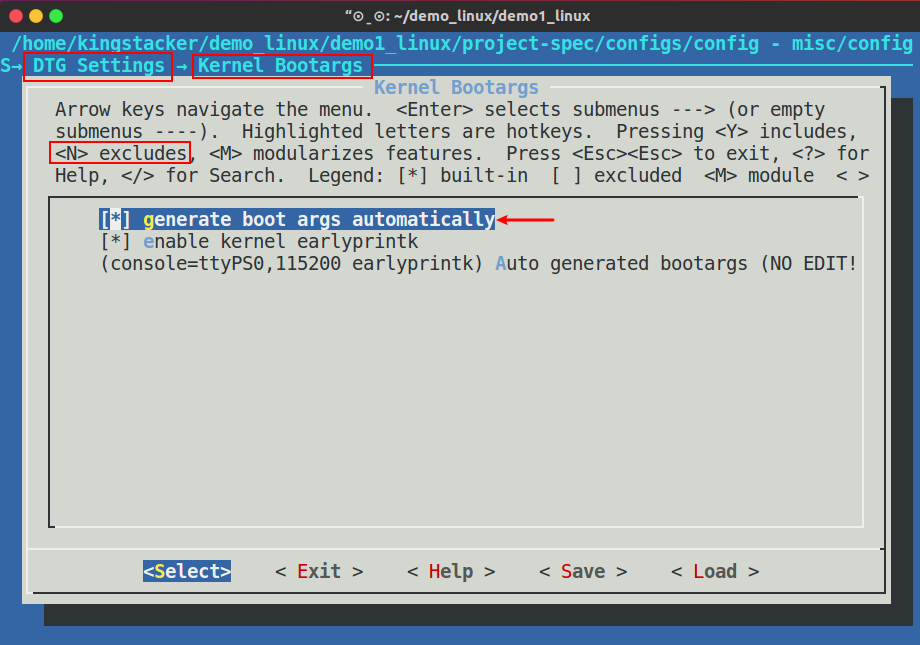
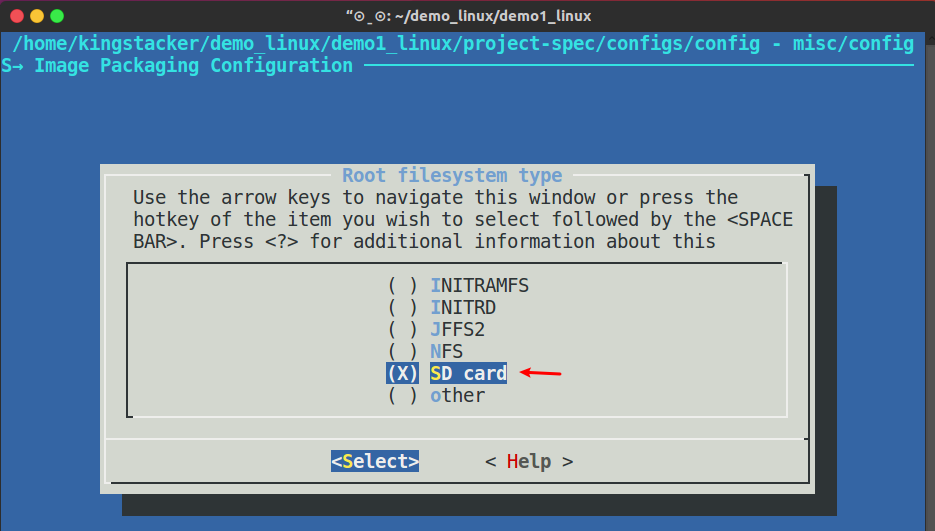
petalinux-config -c u-bootpetalinux-config -c kernelpetalinux-config -c rootfspetalinux-build
petalinux-package --boot --format BIN --fsbl zynq_fsbl.elf --fpga system.bit --u-boot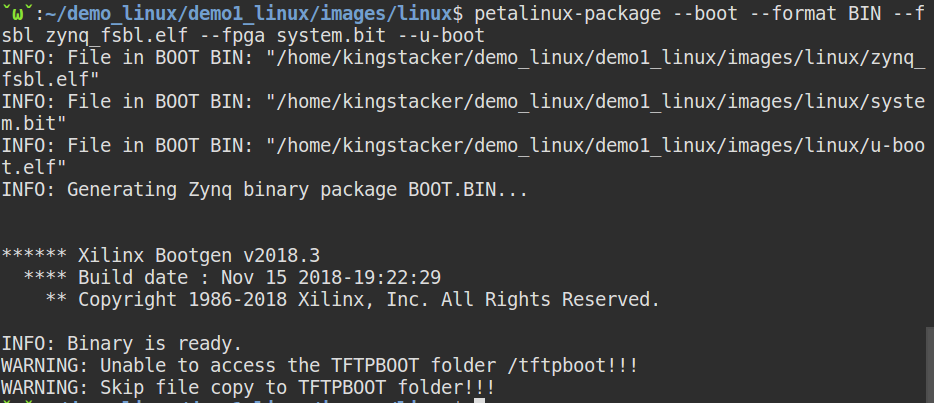

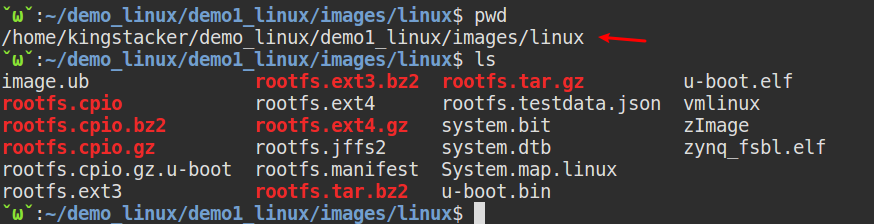
cp BOOT.BIN /media/kingstacker/BOOT/cp image.ub /media/kingstacker/BOOT/
sudo tar xvf rootfs.tar.gz -C /media/kingstacker/RootFS/
petalinux-package --prebuiltpetalinux-boot --qemu --prebuilt 3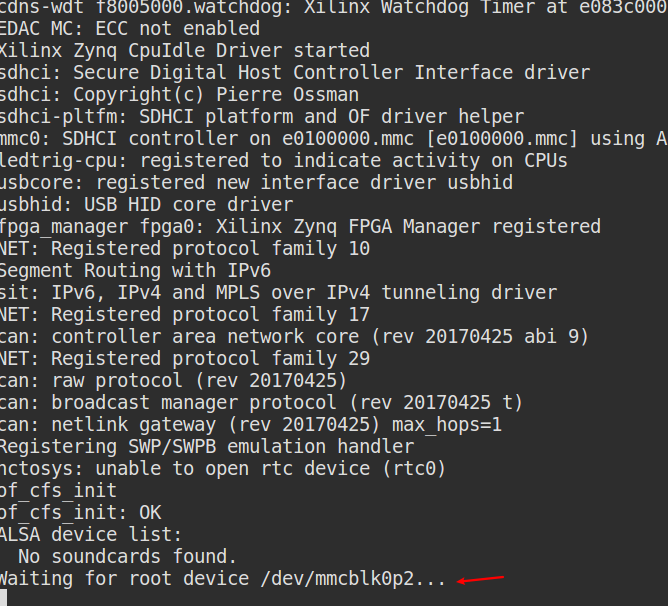
petalinux-boot --qemu --u-boot
petalinux-boot --qemu --kernel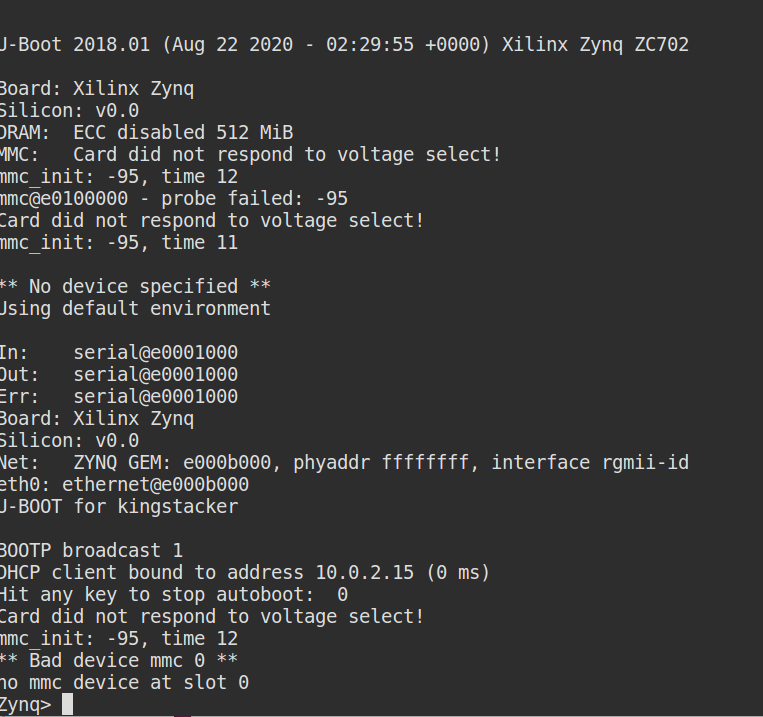
- 下载xilinx的u-boot、kernel:
git clone https://github.com/Xilinx/u-boot-xlnx.git
git clone https://github.com/Xilinx/linux-xlnx.gitgit clone https://github.com/Xilinx/device-tree-xlnx- 工程导入SDK生成设备树:就是新建个设备树工程。
- 设备树信息导入linux中生成dtb文件:
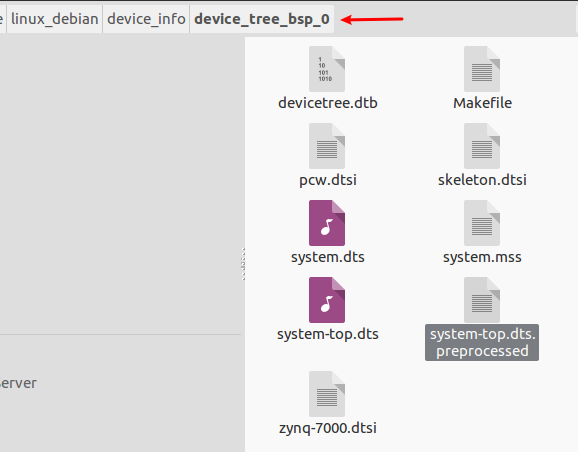
cpp -nostdinc -I include -I arch -undef -x assembler-with-cpp system-top.dts system-top.dts.preprocesseddtc -I dts -O dtb -i . -o devicetree.dtb system-top.dts.preprocessed
CONFIG_ARM=y
CONFIG_SYS_CONFIG_NAME="zynq_zc70x"
CONFIG_ARCH_ZYNQ=y
CONFIG_SYS_TEXT_BASE=0x4000000
CONFIG_SYS_MALLOC_F_LEN=0x800
CONFIG_IDENT_STRING=" Xilinx Zynq ZC702"
CONFIG_SPL_STACK_R_ADDR=0x200000
CONFIG_DEFAULT_DEVICE_TREE="zynq-zc702"
CONFIG_DEBUG_UART=y
CONFIG_DISTRO_DEFAULTS=y
CONFIG_FIT=y
CONFIG_FIT_SIGNATURE=y
CONFIG_FIT_VERBOSE=y
CONFIG_BOOTCOMMAND="run $modeboot || run distro_bootcmd"
# CONFIG_DISPLAY_CPUINFO is not set
CONFIG_SPL=y
CONFIG_SPL_STACK_R=y
CONFIG_SPL_OS_BOOT=y
CONFIG_SYS_PROMPT="Zynq> "
CONFIG_CMD_THOR_DOWNLOAD=y
CONFIG_CMD_EEPROM=y
CONFIG_CMD_MEMTEST=y
CONFIG_CMD_DFU=y
# CONFIG_CMD_FLASH is not set
CONFIG_CMD_FPGA_LOADBP=y
CONFIG_CMD_FPGA_LOADFS=y
CONFIG_CMD_FPGA_LOADMK=y
CONFIG_CMD_FPGA_LOADP=y
CONFIG_CMD_GPIO=y
CONFIG_CMD_I2C=y
CONFIG_CMD_MMC=y
CONFIG_CMD_SF=y
CONFIG_CMD_USB=y
# CONFIG_CMD_SETEXPR is not set
CONFIG_CMD_TFTPPUT=y
CONFIG_CMD_CACHE=y
CONFIG_CMD_EXT4_WRITE=y
CONFIG_OF_EMBED=y
#CONFIG_ENV_IS_IN_SPI_FLASH=y
CONFIG_NET_RANDOM_ETHADDR=y
CONFIG_SPL_DM_SEQ_ALIAS=y
CONFIG_DFU_MMC=y
CONFIG_DFU_RAM=y
CONFIG_FPGA_XILINX=y
CONFIG_DM_GPIO=y
CONFIG_MMC_SDHCI=y
CONFIG_MMC_SDHCI_ZYNQ=y
CONFIG_SPI_FLASH=y
CONFIG_SPI_FLASH_BAR=y
CONFIG_SF_DUAL_FLASH=y
CONFIG_SPI_FLASH_ISSI=y
CONFIG_SPI_FLASH_MACRONIX=y
CONFIG_SPI_FLASH_SPANSION=y
CONFIG_SPI_FLASH_STMICRO=y
CONFIG_SPI_FLASH_WINBOND=y
CONFIG_PHY_MARVELL=y
CONFIG_PHY_REALTEK=y
CONFIG_PHY_XILINX=y
CONFIG_ZYNQ_GEM=y
CONFIG_DEBUG_UART_ZYNQ=y
CONFIG_DEBUG_UART_BASE=0xe0001000
CONFIG_DEBUG_UART_CLOCK=50000000
CONFIG_ZYNQ_SERIAL=y
CONFIG_ZYNQ_QSPI=y
CONFIG_USB=y
CONFIG_USB_EHCI_HCD=y
CONFIG_USB_ULPI_VIEWPORT=y
CONFIG_USB_ULPI=y
CONFIG_USB_STORAGE=y
CONFIG_USB_GADGET=y
CONFIG_USB_GADGET_MANUFACTURER="Xilinx"
CONFIG_USB_GADGET_VENDOR_NUM=0x03fd
CONFIG_USB_GADGET_PRODUCT_NUM=0x0300
CONFIG_CI_UDC=y
CONFIG_USB_GADGET_DOWNLOAD=y
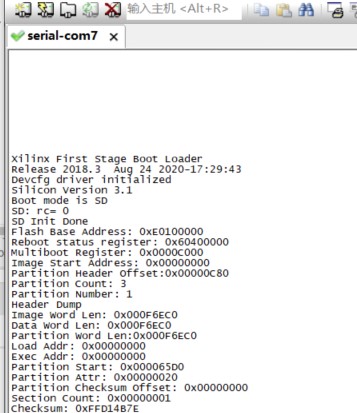
make distcleanmake CROSS_COMPILE=arm-linux-gnueabihf- zynq_zc702_defconfigmake CROSS_COMPILE=arm-linux-gnueabihf- menuconfigmake CROSS_COMPILE=arm-linux-gnueabihf- toolsmake CROSS_COMPILE=arm-linux-gnueabihf-- 在SDK中先生新建fsbl工程成FSBL,在src的h文件中添加debug属性,可以在控制台中打印FSBL阶段的启动信息:
#define FSBL_DEBUG_INFO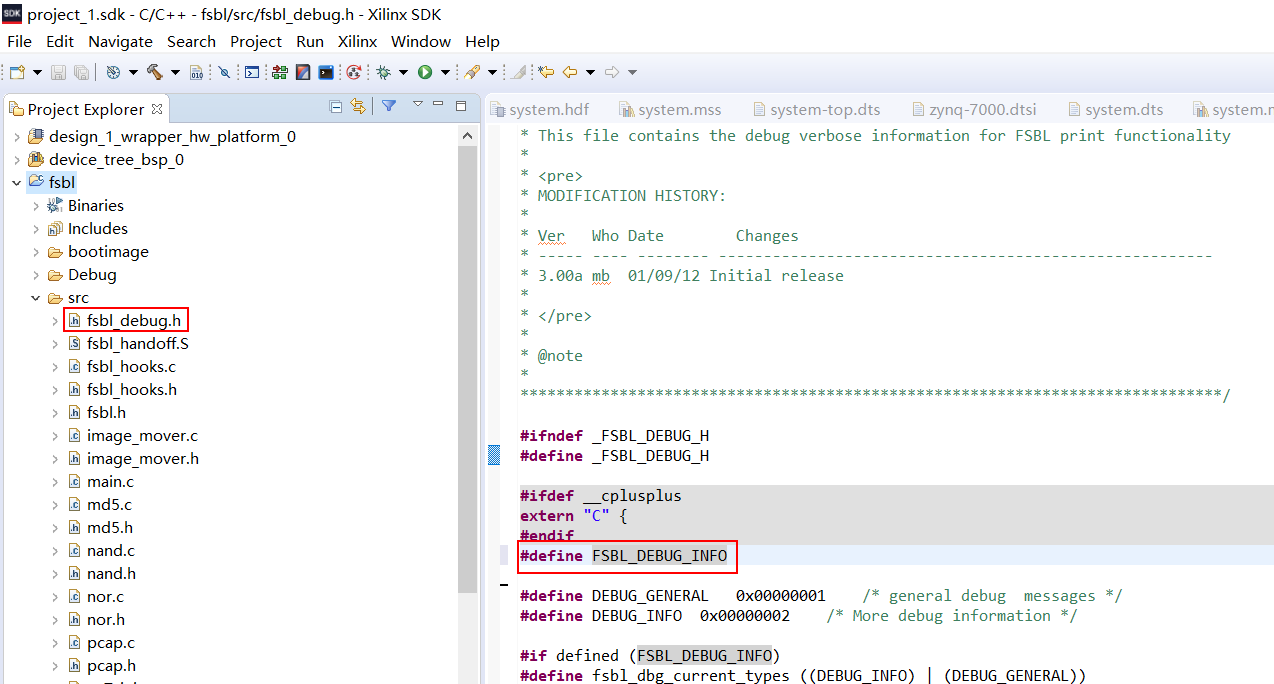
解决 "mkimage" command not found - U-Boot images will not be built
sudo apt-get install u-boot-tools#make distclean#make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- xilinx_mz7x_defconfig #make ARCH=arm menuconfig#make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- prepare scripts #make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- UIMAGE_LOADADDR=0x8000 uImage - 文件系统:
sudo apt-get install binfmt-support qemu qemu-user-static debootstrapsudo debootstrap --arch=armhf --foreign stretch rootfs http://cdn.debian.net/debiancp /usr/bin/qemu-arm-static {{刚刚rootfs目录}}/usr/binDEBIAN_FRONTEND=noninteractive DEBCONF_NONINTERACTIVE_SEEN=true LC_ALL=C LANGUAGE=C LANG=C chroot rootfs debootstrap/debootstrap --second-stagechroot rootfsecho deb http://ftp.cn.debian.org/debian/ stretch main > /etc/apt/sources.listapt-get updateapt-get install vim sudo net-tools#!/bin/sh -e
#
#rc.local
#sh in there
/home/sh_boot.sh
#sh end
exit 0
EOFecho "Welcome to use,powerd by kingstacker"
echo "config the eth......."
ifconfig eth0 192.168.0.110 netmask 255.255.255.0 up
echo "config finish."- 打包rootfs备份:
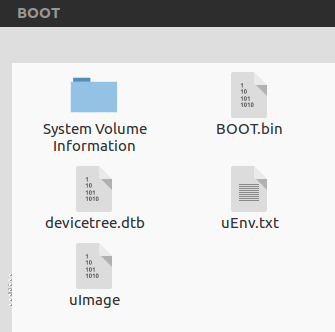
tar -zcvf debian9_rootfs.tar.gz ./tar zxvf debian9_rootfs.tar.gz -C /media/kingstacker/RootFShttps://www.jianguoyun.com/p/DdhhnukQ15CBCBjvgrcD - SD卡BOOT分区内容如下:bin文件、设备树、txt、内核镜像。
bootargs=console=ttyPS0,115200 root=/dev/mmcblk0p2 rw earlyprintk rootfstype=ext4 rootwait
load_image=fatload mmc 0 ${kernel_load_address} ${kernel_image} && fatload mmc 0 ${devicetree_load_address} ${devicetree_image}
uenvcmd=echo Copying Linux from SD to RAM... && mmcinfo && run load_image && bootm ${kernel_load_address} - ${devicetree_load_address}
ZYNQ Linux 移植:包含petalinux移植和手动移植debian9的更多相关文章
- ZYNQ FLASH+EMMC手动移植LINUX启动
前言 虽可使用Petalinux进行移植,简单方便,但为了更清楚明白的了解整个流程,还是尝试了一波手动移植. 参考资料 ZYNQ Linux 移植:包含petalinux移植和手动移植debian9 ...
- 嵌入式Linux下MP4视频录制库MP4V2移植和简单介绍
**************************************************************************************************** ...
- STM32 HAL库详解 及 手动移植
源: STM32 HAL库详解 及 手动移植
- Linux下移动图像监测系统——motion的移植及应用
移动图像监控主系统的开发 移动图像监控的原理方法: 通过获取摄像头图像,比较前后每一帧的图像数据,从而实现移动物体监控.所有移动监控均是如此,只是图像帧的比较算法不同. 移动图像监控系统的实现 选择开 ...
- zynq linux驱动之PL-PS中断【转】
转自:https://blog.csdn.net/h244259402/article/details/83993524 PC:Windows 10 虚拟机:ubuntu 16.04 vivado:2 ...
- VM的Linux CentOS系统的VMTools的手动安装
VM的Linux CentOS系统的VMTools的手动安装 一是没时间安装,另外是一直用的是VM的绿色版,里面没有Linux.iso 文件 今天晚上安装上了 linux 的vmtools ,再也不用 ...
- Linux显示包含全部的文件系统
Linux显示包含全部的文件系统 youhaidong@youhaidong-ThinkPad-Edge-E545:~$ df -a 文件系统 1K-blocks 已用 可用 已用% 挂载点 /dev ...
- 老段带你学鸟哥Linux视频教程 包含基础班+提高班
老段带你学鸟哥Linux视频教程 包含基础班+提高班,附带pdf文档. 目录结构如下: 目录:/-老段带你学鸟哥Linux视频教程 [.9G] ┣━━老段带你学鸟哥-服务器篇 [1009.4M] ┃ ...
- Linux系统在嵌入式硬件上的移植
========================= 基本常识 ========================= 一. Linux系统的基本构成: 1. loader 2. ...
随机推荐
- springcloud中 getway中的断言配置: Predicate 9中配置过程, getway的 filters实现限流功能:
https://www.cnblogs.com/grasp/p/11506426.html 这里引用别人的,,且试验过 ,没问题 server: port: 9527 spring: applicat ...
- Springboot中以配置类方式自定义Mybatis的配置规则(如开启驼峰映射等)
什么是自定义Mybatis的配置规则? 答:即原来在mybatis配置文件中中我们配置到<settings>标签中的内容,如下第6-10行内容: 1 <?xml version=&q ...
- 我的QT学习路线(目前)
qt基础->qt事件->qt绘图->qt文件IO->qt网络通信->qt多线程->qt数据库操作.
- SqlServer中offset..fetch 的使用问题
好久没更新了,最近忙的很,也生病了,重感冒,555~~~ 早上抽的一丝空闲,来讲讲SqlServer中的分页问题.其实用过了多种数据库,分页这问题已经是老生常谈的问题了.不管是开发什么类型的网站,只要 ...
- 安卓控件RecycleView的简单使用
RecycleView的使用 目录 RecycleView的使用 技术概述 技术详述 遇到问题和解决 总结 参考文献 技术概述 RecycleView是谷歌官方对ListView的改进(并不是替代), ...
- 『心善渊』Selenium3.0基础 — 11、Selenium对元素常用操作
目录 1.Selenium对元素常用操作 2.Selenium对元素的其他操作 1.Selenium对元素常用操作 操作 说明 click() 单击元素 send_keys() 模拟输入 clear( ...
- 基于HSI和局部同态滤波的彩色图像增强
简介 在图像采集过程中,由于光照环境或物体表面反光等原因会造成图像光照不均 .图像的光照不均会直接影响图像分析的结果.因此,对光照不均图像进行增强,消除光照的影响是光照不均图像处理中不可缺少的环节 . ...
- 12、创建mysql用户及赋予用户权限
1.通过help命令查看grant的用法: CREATE USER 'jeffrey'@'localhost' IDENTIFIED BY 'password'; GRANT ALL ON db1.* ...
- 附加数据库出现 无法打开物理文件 操作系统错误 5:拒绝访问 SQL
刚刚从公司的电脑上考到自己刚刚装好系统的笔记本上面,出现了问题: 无法打开物理文件 操作系统错误 5:拒绝访问 . 网上找了下解决方法: 找到需要导入的 mdf和ldf 修改它的权限为完全控制,不 ...
- POJ 2299 Ultra-QuickSort 求逆序数 线段树或树状数组 离散化
我用的线段树写的. num数组表示已插入的数值的个数. 由于a[i]数值很大,但是n不是很大,所以要离散化处理 9 1 0 5 4 离散化后 4 1 0 3 2 这样保证最大值不会超过n #inclu ...