KinectV2+Ubuntu 14.04+Ros 安装教程
前言
个人理解错误的地方还请不吝赐教,转载请标明出处,内容如有改动更新,请看原博:http://www.cnblogs.com/hitcm/
如有任何问题,feel free to contact me at robotsming@gmail.com
最近经常有朋友问到Kinect V2在Ubuntu下的开发问题,首先需要弄清楚的是你的设备是V1还是V2,这两个的驱动是不能通用的。
如下是V2(左)和V1(右)。看看自己的设备,然后再决定用哪个安装方案。
本文针对的是V2的情况。


安装
1、首先git下载代码,很快下载好,放到~下面
git clone https://github.com/OpenKinect/libfreenect2.git
2、然后安装依赖项如下,最好事先编译安装好OpenCV
sudo apt-get install build-essential cmake pkg-config libturbojpeg libjpeg-turbo8-dev mesa-common-dev freeglut3-dev libxrandr-dev libxi-dev
3、然后安装libusb。此处需要添加一个PPA,就是下面的第一行命令,不然绝逼是装不上的。
sudo apt-add-repository ppa:floe/libusb
sudo apt-get update
sudo apt-get install libusb-1.0-0-dev
4、接着运行下面的命令,安装GLFW3
sudo apt-get install libglfw3-dev
如果没有成功的话,使用下面的命令,来代替上面的
cd libfreenect2/depends sh install_ubuntu.sh sudo dpkg -i libglfw3*_3.0.4-1_*.deb
5、然后安装OpenCL的支持库(不打算使用GPU,这一步直接跳过没做)
6、接着编译库
cd .. mkdir build && cd build cmake .. make sudo make install
测试
最后可以运行程序.
在build下面有个bin文件夹,放置生成的输出文件,插上kinect,然后运行。此时黄灯变成白色的,表示有驱动。注意:只能用于USB3的接口,好在台式机和笔记本都有3.0的口。
./bin/Protonect
但是提示权限不够,failed to open Kinect V2 Access denied
此时需要把libfreenect2文件夹下面的rules里面的一个90开头的文件复制到/etc/udev/rules.d/下面就可以了。
然后重新运行上面的命令就可以了。
Ros接口安装
对于已经安装了Ros Indigo的Ubuntu14.04来说,使用下面的命令
cd ~/catkin_ws/src/
git clone https://github.com/code-iai/iai_kinect2.git
cd iai_kinect2
rosdep install -r --from-paths .
cd ~/catkin_ws
catkin_make -DCMAKE_BUILD_TYPE="Release"
rospack profile
接下来可以测试了。
roslaunch kinect2_bridge kinect2_bridge.launch
然后重新开一个新的终端
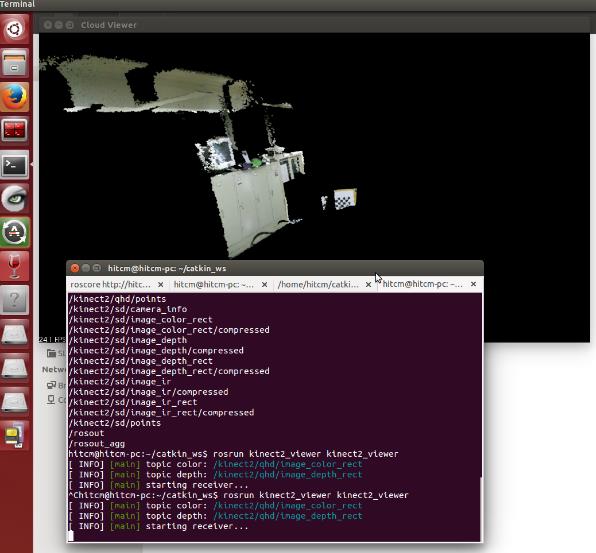
rosrun kinect2_viewer kinect2_viewer
显示如下图所示。Good Luck and enjoy it!
KinectV2+Ubuntu 14.04+Ros 安装教程的更多相关文章
- ubuntu 14.04 lts安装教程:u盘安装ubuntu 14.04 lts步骤
绿茶小编带来了ubuntu 14.04 lts安装教程,下文详细讲解了u盘安装ubuntu 14.04 lts的步骤,很简单,只需要一个工具就能够轻松使用u盘安装ubuntukylin 14.04系统 ...
- Kinect for Xbox one(v2) + Ubuntu 14.04 +ROS 安装
相比于kinect for xbox 360(v1)通过结构光来获取深度,Kinect for Xbox one(v2) 采用time flight技术,极大改善了深度图像的性能. kinect fo ...
- TinyOS在ubuntu 14.04下安装教程
1:打开/etc/apt/sources.list 文件,在文件最底部添加安装源: deb http://tinyos.stanford.edu/tinyos/dists/ubuntu lucid m ...
- 分布式进阶(二)Ubuntu 14.04下安装Dockr图文教程(一)
当前,完全硬件虚拟化技术(KVM.Xen.Hyper-V 等)能在一个物理主机上很好地运行多个互相独立的操作系统,但这也带来一些问题:性能不佳,资源浪费,系统反应迟缓等.有时候对用户来说,完全的硬件虚 ...
- deepsooncms在Ubuntu 14.04上部署教程
deepsooncms在Ubuntu 14.04上部署教程 一.安装mono1.在命令行运行sudo apt-key adv --keyserver keyserver.ubuntu.com --re ...
- Ubuntu 14.04下安装功能强大的屏幕截图软件 Shutter
[注释]试用了一下,果然很强大,牛逼 一款功能强大的屏幕截图软件——Shutter,Shutter最基本的就是截图功能了,在设计上可以自由选定区域,同时选定之 后依然可以通过上下左右四个地方来改变选区 ...
- Ubuntu 14.04 中 安装elasticsearch2.*+logstash2.*+kibana
在Ubuntu 14.04 上安装单机版ELK 2.*(脚本化) 1.判断是否为root权限 if [ "${UID}" -ne 0 ]; then echo "You ...
- Ubuntu 14.04中安装最新版Eclipse
Ubuntu 14.04中安装最新版Eclipse 来源:Linux社区 作者:Linux 1.安装OpenJDK Java 7 如果你的系统中没有安装Java,我们需要按照如下步骤事先安装好 ...
- 翻译:在Ubuntu 14.04上安装FTP服务器的方法
说明: 1.原文地址:http://www.krizna.com/ubuntu/setup-ftp-server-on-ubuntu-14-04-vsftpd/ 2.今天要做一个网络日志的迁移程序,搬 ...
随机推荐
- Cocos2d-x-3.0 Touch事件处理机制
在学习Cocos2d-html5游戏例子的时候,注册事件代码一直提示:TypeError: cc.Director._getInstance(...).getTouchDispatcher is no ...
- javaweb 拦截器报错
拦截器报错 The content of element type "interceptor-ref" must match "(param)*".内容元素 ...
- jquery一些基本函数
jquery.com1.x版本兼容ie2.x版本简化适合移动端 $('li:first') 第一个$('li:eq(2)') $('li:last') 最后一个$('li:odd') 偶数行 1 3$ ...
- ajax 对象创建 兼容各个浏览器
<script> function createAjax(){ var request=false; //window对象中有XMLHttpRequest存在就是非IE,包括(IE7,IE ...
- java.util.concurrent.RejectedExecutionException: Task java.util.concurrent.FutureTask@1f303192 rejected from java.util.concurrent.ThreadPoolExecutor@11f7cc04[Terminated, pool size = 0, active threads
java.util.concurrent.RejectedExecutionException: Task java.util.concurrent.FutureTask@1f303192 rejec ...
- python基础知识---迭代器、生成器、装饰器
一.迭代器 二.生成器 http://www.cnblogs.com/huxi/archive/2011/07/14/2106863.html def func(): #定义生成器,和普通函数的区别是 ...
- cookie 和session 的区别
假如我填好了淘宝的用户名密码,点击登录,浏览器客户端像服务器端发送请求,这时服务器端看这个用户是第一次登陆,session会让客户端这个浏览器生成个cookie,并给cookie一个session i ...
- ConCurrent in Practice小记 (3)
ConCurrent in Practice小记 (3) 高级同步技巧 Semaphore Semaphore信号量,据说是Dijkstra大神发明的.内部维护一个许可集(Permits Set),用 ...
- 安装Maven
下载进入官网下载页面:http://maven.apache.org/download.html我用的是windows,下载apache-maven-3.2.5-bin.zip: Maven 3.2. ...
- javascript对象引用与赋值
avascript对象引用与赋值 <script type="text/javascript"> //例子一: 引用 var myArrayRef = new Arra ...