Poj 2074 Line of Sight
地址:http://poj.org/problem?id=2074
题目:
| Time Limit: 1000MS | Memory Limit: 30000K | |
| Total Submissions: 4148 | Accepted: 1291 |
Description
To satisfy the architect's need to know how visible the house is, you must write a program that accepts as input the locations of the house, property line, and surrounding obstructions and calculates the longest continuous portion of the property line from which the entire house can be seen, with no part blocked by any obstruction.
Input
< x1 > < x2 > < y >
Where x1, x2, and y are non-negative real numbers. x1 < x2
An input file can describe the architecture and landscape of multiple houses. For each house, the first line will have the coordinates of the house. The second line will contain the coordinates of the property line. The third line will have a single integer that represents the number of obstructions, and the following lines will have the coordinates of the obstructions, one per line.
Following the final house, a line "0 0 0" will end the file.
For each house, the house will be above the property line (house y > property line y). No obstruction will overlap with the house or property line, e.g. if obstacle y = house y, you are guaranteed the entire range obstacle[x1, x2] does not intersect with house[x1, x2].
Output
Sample Input
2 6 6
0 15 0
3
1 2 1
3 4 1
12 13 1
1 5 5
0 10 0
1
0 15 1
0 0 0
Sample Output
8.80
No View
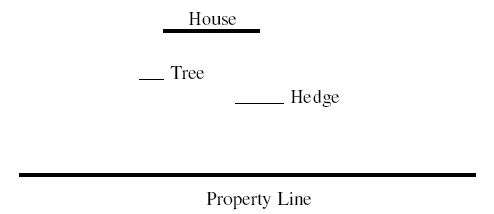
思路:首先排除掉不在house和proprety line的y的区间中线段,再求出对于每个线段的在property上的不可见区间。
如图所示:

然后把所有的区间按左端点为第一关键字,右端点为第二关键字从小到大排序,扫描一遍就好了。
/* 二维几何 */
/* 需要包含的头文件 */
#include<cstdio>
#include <cstring>
#include <cmath >
#include <iostream>
#include <algorithm> using namespace std;
/** 常用的常量定义 **/
const double INF = 1e200;
const double eps = 1e-;
const double PI = acos(-1.0);
const int Max = 1e5;
/** 基本几何结构 **/
struct Point
{
double x,y;
Point(double a=, double b=){x=a,y=b;}
bool operator<(const Point &ta)const
{
if(x==ta.x) return y<ta.y;
return x<ta.x;
}
friend Point operator+(const Point &ta,const Point &tb)
{
return Point(ta.x+tb.x,ta.y+tb.y);
}
friend Point operator-(const Point &ta,const Point &tb)
{
return Point(ta.x-tb.x,ta.y-tb.y);
}
};
struct Vec2D ///二维向量,*重载为点乘,/重载为叉乘
{
double x,y;
Vec2D(double ta,double tb){x=ta,y=tb;}
Vec2D(Point &ta){x=ta.x,y=ta.y;}
friend double operator*(const Vec2D &ta,const Vec2D &tb)
{
return ta.x*tb.x+ta.y*tb.y;
}
friend double operator/(const Vec2D &ta,const Vec2D &tb)
{
return ta.x*tb.y-ta.y*tb.x;
}
friend Vec2D operator+(const Vec2D &ta,const Vec2D &tb)
{
return Vec2D(ta.x+tb.x,ta.y+tb.y);
}
friend Vec2D operator-(const Vec2D &ta,const Vec2D &tb)
{
return Vec2D(ta.x-tb.x,ta.y-tb.y);
}
Vec2D operator=(const Vec2D &ta)
{
x=ta.x,y=ta.y;
return *this;
}
};
struct LineSeg ///线段,重载了/作为叉乘运算符,*作为点乘运算符
{
Point s,e;
LineSeg(){s=Point(,),e=Point(,);}
LineSeg(Point a, Point b){s=a,e=b;}
double lenth(void)
{
return sqrt((s.x-e.x)*(s.x-e.x)+(s.y-e.y)*(s.y-e.y));
}
friend double operator*(const LineSeg &ta,const LineSeg &tb)
{
return (ta.e.x-ta.s.x)*(tb.e.x-tb.s.x)+(ta.e.y-ta.s.y)*(tb.e.y-tb.s.y);
}
friend double operator/(const LineSeg &ta,const LineSeg &tb)
{
return (ta.e.x-ta.s.x)*(tb.e.y-tb.s.y)-(ta.e.y-ta.s.y)*(tb.e.x-tb.s.x);
}
LineSeg operator=(const LineSeg &ta)
{
s=ta.s,e=ta.e;
return *this;
}
};
struct Line /// 直线的解析方程 a*x+b*y+c=0 为统一表示,约定 a >= 0
{
double a,b,c;
Line(double d1=, double d2=-, double d3=){ a=d1,b=d2,c=d3;}
}; int sgn(double ta,double tb);
double fArea(Point &ta,Point &tb,Point &tc);
bool intersect(LineSeg &lx,LineSeg &ly);
bool intersection(LineSeg &lx,LineSeg &ly,Point &pt);
double getdis(const Point &ta,const Point &tb);
bool cmp(const Point &ta,const Point &tb);
void graham(Point ps[],Point tb[],int n,int &num);
void ConvexClosure(Point ps[],Point tb[],int n,int &num); void scf(LineSeg &lx)
{
cin>>lx.s.x>>lx.e.x>>lx.s.y;
lx.e.y=lx.s.y;
}
LineSeg hs,pl,cur,lx;
Point line[Max],tx,ty;
int main(void)
{
while()
{
int n,num=;
scf(hs);
if(!(hs.s.x||hs.s.y||hs.e.x))
break;
scf(pl);
cin>>n;
for(int i=;i<n;i++)
{
scf(cur);
if(sgn(cur.s.y,hs.s.y)<&&sgn(cur.s.y,pl.s.y)>)
{
lx=LineSeg(hs.s,cur.e);
intersection(lx,pl,tx);
lx=LineSeg(hs.e,cur.s);
intersection(lx,pl,ty);
if(tx.x>=ty.x)
line[num++]=Point(ty.x,tx.x);
else
line[num++]=Point(tx.x,ty.x);
}
}
sort(line,line+num);
double ans=,rr=pl.s.x;
line[num++]=Point(pl.e.x,pl.e.x);
for(int i=;i<num;i++)
if(!(line[i].y<pl.s.x || line[i].x>pl.e.x))
{
//printf("====%f %f\n",line[i].x,line[i].y);
line[i].x=max(pl.s.x,line[i].x);
line[i].y=min(pl.e.x,line[i].y);
if(line[i].x>rr)
ans=max(ans,line[i].x-rr);
rr=max(line[i].y,rr);
}
if(sgn(ans,))
printf("%.2f\n",ans);
else
printf("No View\n"); } return ;
} /*******判断ta与tb的大小关系*******/
int sgn(double ta,double tb)
{
if(fabs(ta-tb)<eps)return ;
if(ta<tb) return -;
return ;
}
/*********求两点的距离*************/
double getdis(const Point &ta,const Point &tb)
{
return sqrt((ta.x-tb.x)*(ta.x-tb.x)+(ta.y-tb.y)*(ta.y-tb.y));
}
/************三角形面积**************************/
double fArea(Point &ta,Point &tb,Point &tc)
{
return fabs(LineSeg(ta,tb)/LineSeg(ta,tc)*0.5);
} /*********** 判断P1P2是否和P3P4相交****************************
其中Pi坐标为(xi,yi),需要满足两个条件:
(1)快速排斥试验:
以P1P2为对角线的矩形S1是否和以P3P4为对角线的矩形S2相交,
即 min(x1,x2)<=max(x3,x4) && min(x3,x4)<=max(x1,x2)
&& min(y1,y2)<=max(y3,y4) &&min(y3,y4)<=max(y1,y2)
(2)跨立试验:
点P1,P2必然在线段P3P4的不同侧,
点P3,P4必然在线段P1P2的不同侧,
***************************************************************/
bool intersect(LineSeg &lx,LineSeg &ly)
{
return sgn(min(lx.s.x,lx.e.x),max(ly.s.x,ly.e.x))<=
&& sgn(min(ly.s.x,ly.e.x),max(lx.s.x,lx.e.x))<=
&& sgn(min(lx.s.y,lx.e.y),max(ly.s.y,ly.e.y))<=
&& sgn(min(ly.s.y,ly.e.y),max(lx.s.y,lx.e.y))<=
&& sgn((lx/LineSeg(lx.s,ly.s))*(lx/LineSeg(lx.s,ly.e)),)<=
&& sgn((ly/LineSeg(ly.s,lx.s))*(ly/LineSeg(ly.s,lx.e)),)<=;
}
/************线段求交点**************************
返回-1代表直线平行,返回0代表直线重合,返回1代表线段相交
利用叉积求得点P分线段DC的比,
然后利用高中学习的定比分点坐标公式求得分点P的坐标
**************************************************/
bool intersection(LineSeg &lx,LineSeg &ly,Point &pt)
{
pt=lx.s;
if(sgn(lx/ly,)==)
{
if(sgn(LineSeg(lx.s,ly.e)/ly,)==)
return ;//重合
return -;//平行
}
double t = (LineSeg(lx.s,ly.s)/ly)/(lx/ly);
pt.x+=(lx.e.x-lx.s.x)*t, pt.y+=(lx.e.y-lx.s.y)*t;
return ;
}
/** ************凸包算法****************
寻找凸包的graham 扫描法
PS(PointSet)为输入的点集;
tb为输出的凸包上的点集,按照逆时针方向排列;
n为PointSet中的点的数目
num为输出的凸包上的点的个数
****************************************** **/
bool cmp(const Point &ta,const Point &tb)/// 选取与最后一条确定边夹角最小的点,即余弦值最大者
{
// double tmp=LineSeg(ps[0],ta)/LineSeg(ps[0],tb);
// if(sgn(tmp,0)==0)
// return getdis(ps[0],ta)<getdis(ps[0],tb);
// else if(tmp>0)
// return 1;
return ;
}
void graham(Point ps[],Point tb[],int n,int &num)
{
int cur=,top=;
for(int i=;i<n;i++)
if(sgn(ps[cur].y,ps[i].y)> || (sgn(ps[cur].y,ps[i].y)== && sgn(ps[cur].x,ps[i].x)>))
cur=i;
swap(ps[cur],ps[]);
sort(ps+,ps+n,cmp);
tb[]=ps[],tb[]=ps[],tb[]=ps[];
for(int i=;i<n;i++)
{
while(sgn(LineSeg(tb[top-],tb[top])/LineSeg(tb[top-],ps[i]),)<)
top--;
tb[++top]=ps[i];
}
num=top+;
}
/** 卷包裹法求点集凸壳,参数说明同graham算法 **/
void ConvexClosure(Point ps[],Point tb[],int n,int &num)
{
LineSeg lx,ly;
int cur,ch;
bool vis[Max];
num=-,cur=;
memset(vis,,sizeof(vis));
for(int i=;i<n;i++)
if(sgn(ps[cur].y,ps[i].y)> || (sgn(ps[cur].y,ps[i].y)== && sgn(ps[cur].x,ps[i].x)>))
cur=i;
tb[++num]=ps[cur];
lx.s=Point(ps[cur].x-,ps[cur].y),lx.e=ps[cur];
/// 选取与最后一条确定边夹角最小的点,即余弦值最大者
while()
{
double mxcross=-,midis,tmxcross;
ly.s=lx.e;
for(int i=;i<n;i++)if(!vis[i])
{
ly.e=ps[i];
tmxcross=(lx*ly)/lx.lenth()/ly.lenth();
if(sgn(tmxcross,mxcross)> ||(sgn(tmxcross,mxcross)== && getdis(ly.s,ly.e)<midis))
mxcross=tmxcross,midis=getdis(ly.s,ly.e),ch=i;
}
if(ch==cur)break;
tb[++num]=ps[ch],vis[ch]=;
lx.s=tb[num-],lx.e=tb[num],ly.s=tb[num];
}
}
Poj 2074 Line of Sight的更多相关文章
- 简单几何(直线求交点) POJ 2074 Line of Sight
题目传送门 题意:从一条马路(线段)看对面的房子(线段),问连续的能看到房子全部的最长区间 分析:自己的思路WA了:先对障碍物根据坐标排序,然后在相邻的障碍物的间隔找到区间,这样还要判断是否被其他障碍 ...
- poj 2074 Line of Sight 计算几何
/** 大意:给定一个建筑--水平放置,给定n个障碍物, 给定一条街道,从街道上能看到整个建筑的最长的连续的区域 思路: 分别确定每一个障碍物所确立的盲区,即----建筑物的终点与障碍物的起点的连线, ...
- [poj] 2074 Line of Sight || 直线相交求交点
原题 给出一个房子(线段)的端点坐标,和一条路的两端坐标,给出一些障碍物(线段)的两端坐标.问在路上能看到完整房子的最大连续长度是多长. 将障碍物按左端点坐标排序,然后用房子的右端与障碍物的左端连线, ...
- unity下的Line of Sight(LOS)的绘制
先说说什么是Linf of Sight.在很多RTS游戏中,单位与单位之间的视野关系经常会受到障碍物遮挡.Line of Sight指的就是两个物体之间是否没有障碍物遮挡. 比如在dota中,玩家的视 ...
- 【转】Using Raycasts and Dynamically Generated Geometry to Create a Line of Sight on Unity3D
http://www.linkedin.com/pulse/using-raycasts-dynamically-generated-geometry-create-line-thomas José ...
- 【转】unity下的Line of Sight(LOS)的绘制
http://www.cnblogs.com/yangrouchuan/p/6366629.html 先说说什么是Linf of Sight.在很多RTS游戏中,单位与单位之间的视野关系经常会受到障碍 ...
- POJ2074:Line of Sight——题解
http://poj.org/problem?id=2074 题目大意:(下面的线段都与x轴平行)给两条线段,一个点在其中一条线段看另一条线段,但是中间有很多线段阻挡视线.求在线段上最大连续区间使得在 ...
- G - Line of Sight
来源poj2074 An architect is very proud of his new home and wants to be sure it can be seen by people p ...
- poj 2074
哎怎么说,感觉现在处理平面上点线的题已经比较熟练了. 这题就离散化然后搞个前缀和就没了. 准备开始进一步的自闭了. 下面是disguss的一些样例... 其实是我自己写错了个地方,本来能1A的. #i ...
随机推荐
- HBase MemStore与HStoreFile 的大小分析
Sumary: MemStore结构 KeyValue构成细节 HFile分析 Maven 项目例子使用了Maven来管理Dependency,要运行例子,需要有maven环境,后面提到的HFile, ...
- CNN图像分割总结
深度学习(三十三)CRF as RNN语义分割-未完待续 http://blog.csdn.net/hjimce/article/details/50888915 Fully Convolutiona ...
- 要创建一个EJB,必须要至少编写哪些Java类和接口?
要创建一个EJB,必须要至少编写哪些Java类和接口? A. 定义远程(或业务)接口 B. 定义本地接口 C. 定义Bean接口 D. 编写Bean的实现 解答:ABC
- 在本地模拟搭建zookeeper集群环境实例
先给一堆学习文档,方便以后查看 官网文档地址大全: OverView(概述) http://zookeeper.apache.org/doc/r3.4.6/zookeeperOver.html Get ...
- [LintCode] 尾部的零
class Solution { public: // param n : description of n // return: description of return long long tr ...
- navicat 中执行sql脚本 喊中文错误
执行内容和上篇一样,只是换了工具. 执行成功,但是数据库对应中文没有内容. sql脚本的编码是asci 执行的时候选择gbk 编码
- mysql 使用命令执行外部sql文件
语句 source e:\\phpPro\\fileName.sql 注意,不需要再后面加 分号 !!!!!
- PageCache 在查询中的作用很大
百度Elasticsearch-产品描述-介绍-百度云 https://cloud.baidu.com/doc/BES/FAQ.html#.51.46.57.73.73.7E.71.4C.6F.AA. ...
- Java基础 - 字符串 String
字符串就是用字符拼接成的文本值,字符串在存储上类似数组,在java语言中把字符串当做对象进行处理 创建字符串 package com.mingri.chapter_02; public class d ...
- dev EditMask 设置方法
官方帮助地址: https://documentation.devexpress.com/WindowsForms/583/Controls-and-Libraries/Editors-and-Sim ...