NOKOV动作捕捉系统使多场协同无人机自主建造成为可能
近年来,工业机器人的兴起使得建造的效率和安全性得以提升,但由于机器人由于大小与活动范围的限制,在大型建筑上难以施展拳脚。上海同济大学建筑系的无人机自主建造小组,正在进行以无人机取代工业机器人进行空中建造为目的,进行无人机自主建造系统的研究,系统由无人机空间位姿反馈和地面站轨迹控制两部分组成。该小组先在一定规模的场地中布置适用场景进行无人机飞行,通过无人机空间位姿的获取,设计地面站控制系统,之后便可将装置的尺度扩大到真实建造的尺度,进行建筑建造。
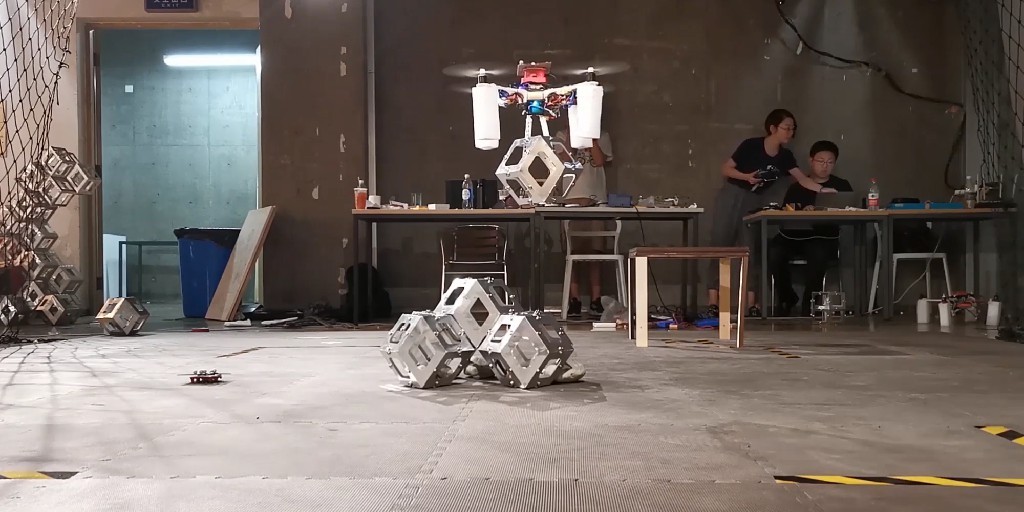
无人机空间位姿的获取,是通过NOKOV度量光学三维动作捕捉系统作为空间定位系统,主要依赖于其精确到亚毫米的高精度捕捉。在层高2.5m,工作区域面积约为5m*6m的环境下,该小组使用了8个动作捕捉镜头组成无人机室内定位系统。动作捕捉镜头通过捕捉固定在无人机上的特制反光标志点,以200Hz的频率记录无人机在空间中的位置信息。获取的数据通过特定算法,得到无人机的六自由度6DoF信息,包括三维空间XYZ坐标,偏航角Yaw,横滚角Roll以及俯仰角Pitch。
无人机定位数据(6DoF数据等)的数据,实时被控制系统中的飞控程序所获取,用自带的传感器数据进行LPE(Local Position Estimate)计算,用于实时更新无人机相对于全局坐标系的位置估计。之后再通过轨迹规划,协调多台无人机执行砌筑、搬运等任务时在多个航点间的移动方式,确保在操作过程中飞行器的安全以及砌筑顺序的正确。
在基于室内动作捕捉系统的无人机自主建造实时控制系统和可视化界面平台上,该小组现已完成了全部由无人机自主完成的搭建试验,向实现空中无人机自主建造的目标更近了一步。希望在将来,动作捕捉技术能够让无人机协同系统在更多的学科、行业发展中实现成本优化与效率提升,发挥巨大作用。
参考文献:[1]郭喆,陆明,王祥.基于无人机的离散结构自主建造技术初探[J].建筑技艺,2019(09):40-45.
NOKOV动作捕捉系统使多场协同无人机自主建造成为可能的更多相关文章
- 光荣与梦想 | XMove动作捕捉系统(一)
XMove是我和几个死党从2010年开始开发的一套人体动作捕捉系统,软硬件全部自行开发,投入了大量的精力,历经三年,发展四个版本. 今年春节回到老家,翻出了2011年春节时焊电路用过的松香和和硬盘角落 ...
- 光学动作捕捉系统中的反光标识点(Marker点)
动作捕捉系统本质上是一种定位系统,通常需要在目标物布置定位设备进行追踪.以红外光学为原理的动作捕捉系统,主要由由光学镜头.动作捕捉软件.反光标识点.POE交换机.和若干配件组成,其中反光标识点(Mar ...
- 真人动作捕捉系统 for Unity
真人动作捕捉 在Asset Store中浏览Mecanim相关的资源时,发现了这个 资源信息 Asset Store:https://www.assetstore.unity3d.com/#/cont ...
- VUP虚拟直播与光学动作捕捉技术
虚拟直播将虚拟场景.虚拟形象实时显示在观众面前,虚拟场景与人物替代了原有的耗费较大搭建成本的实景场景与真人出镜,为观众带来全新的视觉体验,同时新技术降低了原有场景搭建成本,是近些年继AI.VR.动作捕 ...
- 自述创业史 | XMove动作感应系统(二)
XMove是沙漠君和几个死党从2010年开始开发的一套人体动作捕捉系统,软硬件全部自行开发,投入了大量的精力,历经三年,发展四个版本.文章分上下篇,本文为下篇,前三代的故事在<光荣与梦想| XM ...
- AI动作捕捉技术,会让制造业大幅度降低成本吗?
现代动作捕捉系统应该是起源于100多年前的动画工业,通过一种叫做"动态遮罩或影像描摹"的技术,动画师们可以获得流畅的.栩栩如生的动作:后来到了20世纪80年代,动画师们设计出带有活 ...
- 短期连载 第1回 万代南梦宫工作室动画的流派 BNS动作捕捉汐留工作室的采访
原文链接:http://cgworld.jp/interview/201607-bandainamco.html 因开发了[偶像大师],[铁拳],[XX传说]系列等各种游戏而被广为人知的万代南 ...
- Saiku嵌入系统使用时传参数访问saiku(十六)
Saiku嵌入系统使用时传参数访问saiku Saiku通过iframe嵌入其他系统使用时,我们可以设定参数信息,然后根据url中参数对结果进行筛选哦. 这里我们实现的是根据日期字段进行范围查询,UR ...
- 人体动作捕捉格式之BVH
BVH简介 BVH是BioVision公司推出的一种人体动作捕捉文件格式.这种文件以节点为核心元素,记录连续数帧内人体骨架的运动. BVH=? 研究一个东西的时候我比较喜欢先研究它的名字.BVH可以认 ...
- 推荐系统入门:作为Rank系统的推荐系统(协同过滤)
知乎:如何学习推荐系统? 知乎:协同过滤和基于内容的推荐有什么区别? 案例:推荐系统实战? 数据准备:实现推荐栏位:重构接口:后续优化. 简书:实现实时推荐系统的三种方式?基于聚类和协同过滤:基于S ...
随机推荐
- 改变element dialog弹窗的关闭按钮样式
.el-dialog__headerbtn { top: 8px !important; background: url('https://你路径资源的url图片') left no-repeat; ...
- RLHF · PBRL | 发现部分 D4RL tasks 不适合做 offline reward learning 的 benchmark
论文题目:Benchmarks and Algorithms for Offline Preference-Based Reward Learning,TMLR 20230103 发表. open r ...
- require()、import、import()有哪些区别?
require().import.import()是我们常用的引入模块的三种方式,代码中几乎处处用到.如果对它们存在模糊,就会在工作过程中不断产生困惑,更无法做到对它们的使用挥洒自如.今天我们来一起捋 ...
- ChatGLM3-6B:新一代开源双语对话语言模型,流畅对话与低部署门槛再升级
ChatGLM3-6B:新一代开源双语对话语言模型,流畅对话与低部署门槛再升级 1.ChatGLM3简介 ChatGLM3 是智谱AI和清华大学 KEG 实验室联合发布的新一代对话预训练模型.Chat ...
- Linux机器在命令行操作时开启/关闭代理
命令行操作时,如果需要连接通过代理才能访问的地址,可以通过配置当前shell的配置文件来手动开启/关闭代理 注意:代理只对当前用户当前shell生效,切换用户或者重新连接需要重新开启代理 修改当前用户 ...
- 如何自学 PS、PR 等软件?
学习Photoshop(PS)和Premiere Pro(PR)等软件需要一定的时间和耐心,以下是非常详细的自学指南. 第一部分:规划学习路线 1. 确定学习目标 在自学PS和PR之前,首先要明确自己 ...
- 【scikit-learn基础】--『数据加载』之玩具数据集
机器学习的第一步是准备数据,好的数据能帮助我们加深对机器学习算法的理解. 不管是在学习还是实际工作中,准备数据永远是一个枯燥乏味的步骤.scikit-learn库显然看到了这个痛点,才在它的数据加载子 ...
- [ARC169E] Avoid Boring Matches
题解链接 非常厉害的一道题. 考虑无解是什么情况? R 的个数超过 \(2^{n-1}\) 先考虑如何判定.从前往后考虑,如果遇到一个 B,那么如果后面有 R,就选最靠前的 R,否则选最靠后的一个 B ...
- 校验码——循环校验码CRC,海明校验码
- Mybatis-Flex核心功能之@Id
1.是什么? 在 Entity 类中,MyBatis-Flex 是使用 @Id 注解来标识主键的 2.怎么玩? public @interface Id { /** * ID 生成策略,默认为 non ...