4.4 ROS节点名称重名
4.4 ROS节点名称重名
场景:ROS 中创建的节点是有名称的,C++初始化节点时通过API:
ros::init(argc,argv,"xxxx");来定义节点名称,在Python中初始化节点则通过rospy.init_node("yyyy")来定义节点名称。在ROS的网络拓扑中,是不可以出现重名的节点的,因为假设可以重名存在,那么调用时会产生混淆,这也就意味着,不可以启动重名节点或者同一个节点启动多次,的确,在ROS中如果启动重名节点的话,之前已经存在的节点会被直接关闭,但是如果有这种需求的话,怎么优化呢?
在ROS中给出的解决策略是使用命名空间或名称重映射。
命名空间就是为名称添加前缀,名称重映射是为名称起别名。这两种策略都可以解决节点重名问题,两种策略的实现途径有多种:
- rosrun 命令
- launch 文件
- 编码实现
以上三种途径都可以通过命名空间或名称重映射的方式,来避免节点重名,本节将对三者的使用逐一演示,三者要实现的需求类似。
案例
启动两个 turtlesim_node 节点,当然如果直接打开两个终端,直接启动,那么第一次启动的节点会关闭,并给出提示:
[ WARN] [1578812836.351049332]: Shutdown request received.
[ WARN] [1578812836.351207362]: Reason given for shutdown: [new node registered with same name]
因为两个节点不能重名,接下来将会介绍解决重名问题的多种方案。
4.4.1 rosrun设置命名空间与重映射
1.rosrun设置命名空间
1.1设置命名空间演示
语法: rosrun 包名 节点名 __ns:=新名称
rosrun turtlesim turtlesim_node __ns:=/xxx rosrun turtlesim turtlesim_node __ns:=/yyy
两个节点都可以正常运行
1.2运行结果
rosnode list查看节点信息,显示结果:
/xxx/turtlesim
/yyy/turtlesim

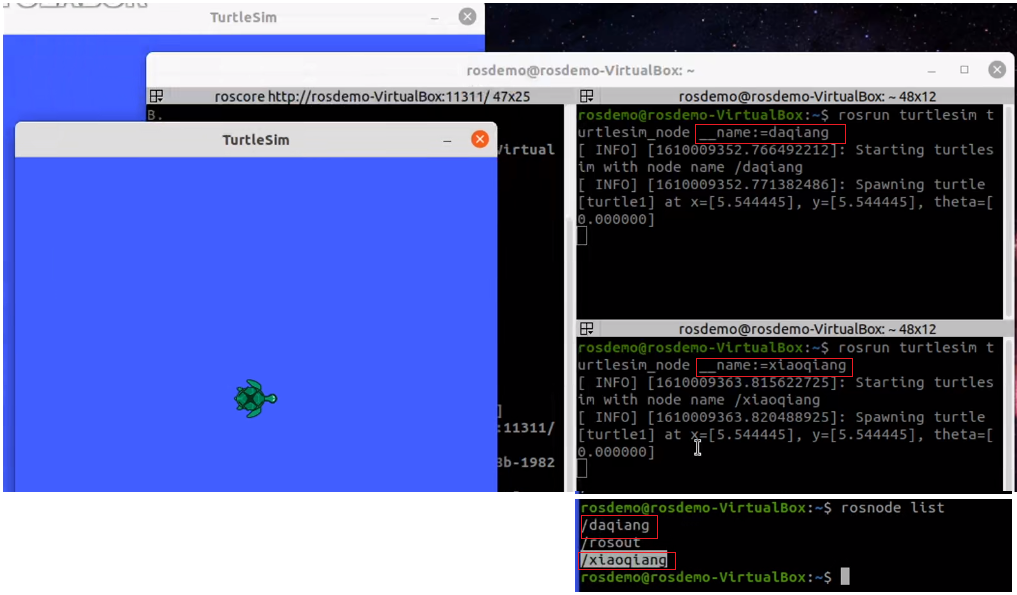
2.rosrun名称重映射
2.1为节点起别名
语法: rosrun 包名 节点名 __name:=新名称
rosrun turtlesim turtlesim_node __name:=t1 | rosrun turtlesim turtlesim_node /turtlesim:=t1(不适用于python) rosrun turtlesim turtlesim_node __name:=t2 | rosrun turtlesim turtlesim_node /turtlesim:=t2(不适用于python)
两个节点都可以运行
2.2运行结果
rosnode list查看节点信息,显示结果:
/t1
/t2
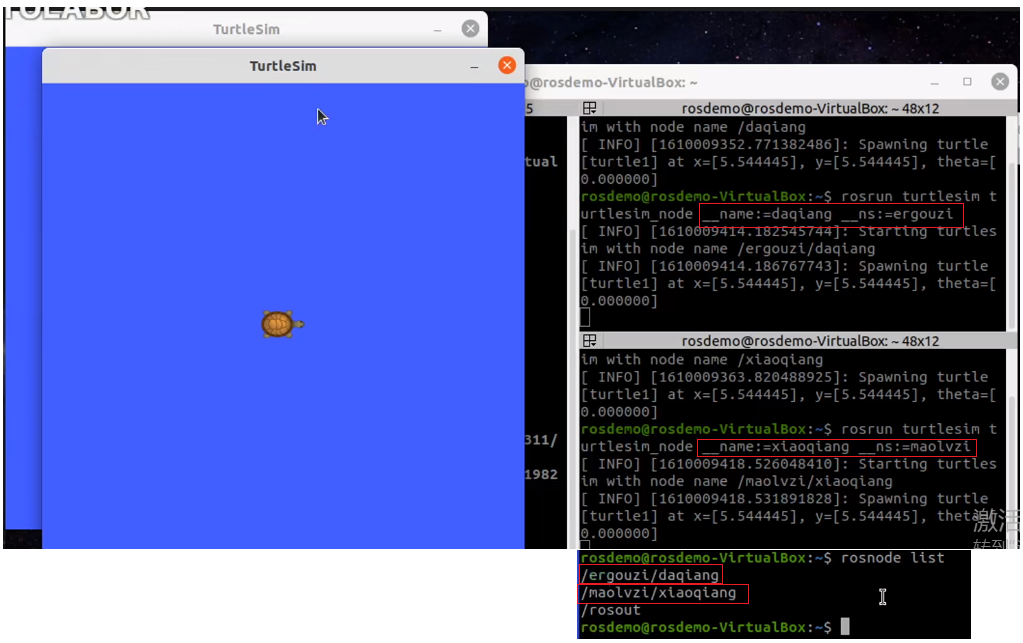
3.rosrun命名空间与名称重映射叠加
3.1设置命名空间同时名称重映射
语法: rosrun 包名 节点名 __ns:=新名称 __name:=新名称
rosrun turtlesim turtlesim_node __ns:=/xxx __name:=tn
3.2运行结果
rosnode list查看节点信息,显示结果:
/xxx/tn
使用环境变量也可以设置命名空间,启动节点前在终端键入如下命令:
export ROS_NAMESPACE=xxxx
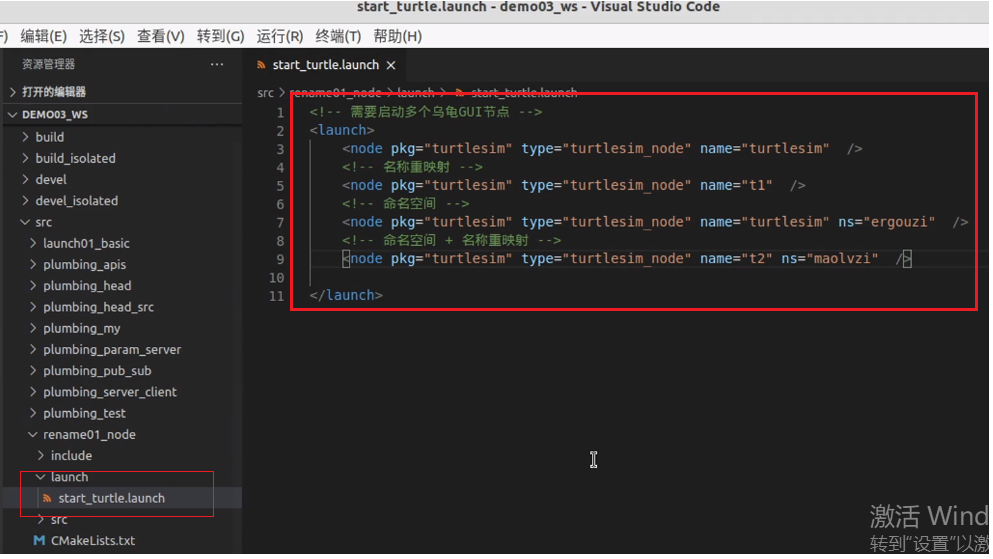
4.4.2 launch文件设置命名空间与重映射
介绍 launch 文件的使用语法时,在 node 标签中有两个属性: name 和 ns,二者分别是用于实现名称重映射与命名空间设置的。使用launch文件设置命名空间与名称重映射也比较简单。
1.launch文件
<launch>
<node pkg="turtlesim" type="turtlesim_node" name="t1" />
<node pkg="turtlesim" type="turtlesim_node" name="t2" />
<node pkg="turtlesim" type="turtlesim_node" name="t1" ns="hello"/>
</launch>
在 node 标签中,name 属性是必须的,ns 可选。
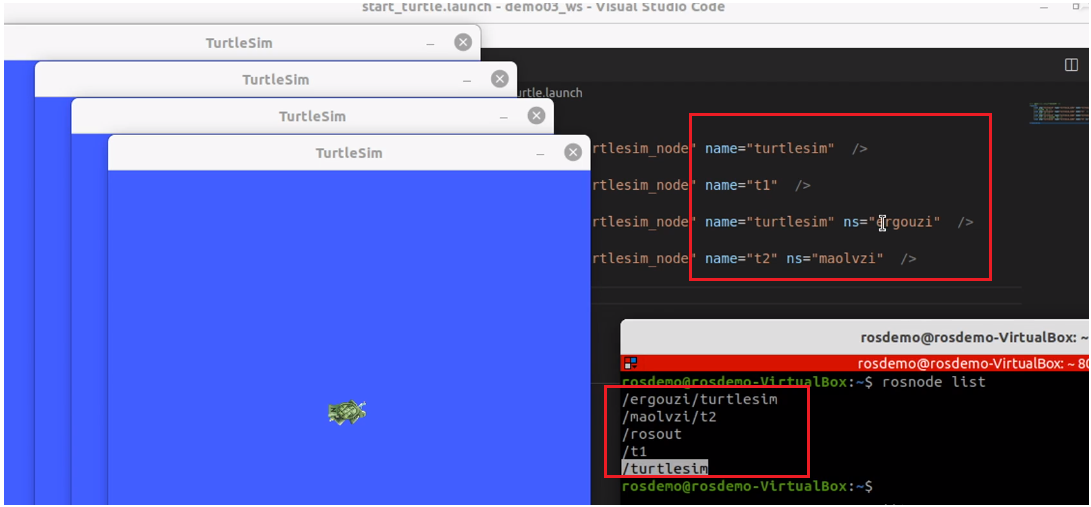
2.运行
rosnode list查看节点信息,显示结果:
/t1
/t2
/t1/hello
4.4.3 编码设置命名空间与重映射
如果自定义节点实现,那么可以更灵活的设置命名空间与重映射实现。
1.C++ 实现:重映射
1.1名称别名设置
核心代码:
ros::init(argc,argv,"zhangsan",ros::init_options::AnonymousName);
1.2执行
会在名称后面添加时间戳。
2.C++ 实现:命名空间
2.1命名空间设置
核心代码
std::map<std::string, std::string> map;
map["__ns"] = "xxxx";
ros::init(map,"wangqiang");
2.2执行
节点名称设置了命名空间。
3.Python 实现:重映射
3.1名称别名设置
核心代码:
rospy.init_node("lisi",anonymous=True)
3.2执行
会在节点名称后缀时间戳。
4.4 ROS节点名称重名的更多相关文章
- db2 v9.5迁移至v10.5,及遇重名节点数据库无法创建db的解决办法
同系统同版本可以使用备份恢复,本文前提是不同系统不同版本,使用db2move命令. 1.db2move db db_name export 此处注意,先建个目录放文件,因为文件比较多,如果上来直接ex ...
- C#获取Excel Sheet名称,对特殊字符、重名进行了处理
/// <summary> /// 获取指定Excel内Sheet集合 /// </summary> /// <param na ...
- 4.2 ROS节点运行管理launch文件
4.2 ROS节点运行管理launch文件 关于 launch 文件的使用我们已经不陌生了,在第一章内容中,就曾经介绍到: 一个程序中可能需要启动多个节点,比如:ROS 内置的小乌龟案例,如果要控制乌 ...
- ROS学习(六)—— 理解ROS节点
一.准备工作 下载一个轻量级的模拟器 sudo apt-get install ros-kinetic-ros-tutorials 二.图概念的理解 1.Nodes:一个节点就是一个可执行文件,用来与 ...
- ROS节点理解--5
理解 ROS节点(原创博文,转载请标明出处--周学伟http://www.cnblogs.com/zxouxuewei/) Description: 本教程主要介绍 ROS 图(graph)概念 并讨 ...
- ROS Learning-007 beginner_Tutorials ROS节点
ROS Indigo beginner_Tutorials-06 ROS节点 我使用的虚拟机软件:VMware Workstation 11 使用的Ubuntu系统:Ubuntu 14.04.4 LT ...
- ROS学习笔记三:编写第一个ROS节点程序
在编写第一个ROS节点程序之前需要创建工作空间(workspace)和功能包(package). 1 创建工作空间(workspace) 创建一个catkin_ws: #注意:如果使用sudo一次 ...
- ROS节点的初始化及退出详解(ros::init、SIGINT、ros::ok、ros::NodeHandle
https://haoqchen.site/2018/04/28/ROS-node-init/ #include "ros/ros.h" #include <signal.h ...
- (转载)myeclipse项目名称重命名
myeclipse项目名称重命名 实例1 今天晚上在做一个jsp唱片显示的实例,myeclipse项目名称原本想写music结果写成了musci.这就需要项目名称的重命名,单纯的使用 “重构--> ...
随机推荐
- 经验分享:分析如何使程序在Linux下后台运行---Linux就该这么学!
转至:https://www.cnblogs.com/maoju/p/13848740.html 一.为什么要使程序在后台执行 我们计算的程序都是周期很长的,通常要几个小时甚至一个星期.我们用的环 ...
- Qt:QCustomPlot使用教程(三)——用户交互
0.说明 本节翻译总结自:Qt Plotting Widget QCustomPlot - User Interactions 本节内容是使用QCustomPlot实现绘图和用户交互功能. 本文代码中 ...
- Qt:Qt Creator分屏显示代码
之前用VS.PyCharm.IntelliJ IDEA时,如果想分屏看代码,直接把某个Code文件拖到IDE之外就可以了. 而Qt Creator却不能这样做,不过这不代表Qt就不能分屏了:可以点击右 ...
- Java:命令行参数的传入和调用
1.传入 传入时机:执行时 格式: //编译 javac Main.java //执行并传入命令行参数 -version java Main -version 此时,参数-version就以Strin ...
- Anaconda Navigator:this application failed to start because it could not find or load ...windows in
原因:在Anaconda的根目录下,有一个叫 qt.conf的文件,用记事本或者Notepad打开 该问题是这些路径错误导致的(比如你把Anaconda挪动了位置,导致这里边的路径还是原来的位置). ...
- P1424
#include <stdio.h> int main(){ int s = 250; int x, n, distance = 0; scanf("%d %d",&a ...
- netty系列之:EventLoop,EventLoopGroup和netty的默认实现
目录 简介 EventLoopGroup和EventLoop EventLoopGroup在netty中的默认实现 EventLoop在netty中的默认实现 总结 简介 在netty中不管是服务器端 ...
- hexo部署到github时,提示typeError [ERR_INVALID_ARG_TYPE] The “mode“ argument must be integer. Receive
hexo部署到github时,提示typeError [ERR_INVALID_ARG_TYPE]: The "mode" argument must be integer. Re ...
- LeetCode-013-罗马数字转整数
罗马数字转整数 题目描述:罗马数字包含以下七种字符: I, V, X, L,C,D 和 M. 字符 数值 I 1 V 5 X 10 L 50 C 100 D 500 M 1000 例如, 罗马数字 2 ...
- SpringBoot 搭建基于 MinIO 的高性能存储服务
1.什么是MinIO MinIO是根据GNU Affero通用公共许可证v3.0发布的高性能对象存储.它与Amazon S3云存储服务兼容.使用MinIO构建用于机器学习,分析和应用程序数据工作负载的 ...