玩转X-CTR100 l STM32F4 l 电机正交编码器

我造轮子,你造车,创客一起造起来!塔克创新资讯【塔克社区 www.xtark.cn 】【塔克博客 www.cnblogs.com/xtark/ 】
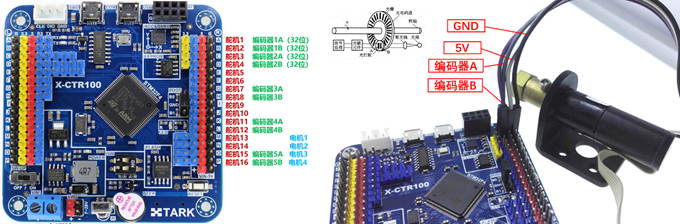
本文介绍X-CTR100控制器的电机正交编码器,X-CTR100具有2路32位AB项正交编码器和3路16位正交编码器,共5路。
可用于电机转速和角度测量,用于智能车、机械臂、机器人制作。
原理
什么是正交?如果两个信号相位相差90度,则这两个信号称为正交。由于两个信号相差90度,因此可以根据两个信号哪个先哪个后来判断方向。
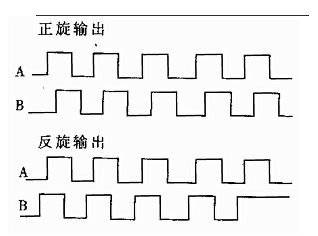
正交编码器(Quadrature Encoder)是一种用于测量旋转速度和方向的传感器,通过积分(累加)运算后,还可以用来测算距离。最常见的正交编码器有两个输出信号:A相 和 B相,有些编码器会有 Z相 的校准功能(用于消除累计误差)。「正交」一词来源于 AB 两个信号的特征,一般情况下 A相 和 B相 的输出信号总是有 π/2 的相位差。
上图中 A 和 B 分别连接到两个传感器单元上,黑白相间的圆环称之为「栅格」。传感器和栅格的实现方式有很多种:反射式传感器+不同反光率的栅格;对射式传感器+镂空光栅;霍尔传感器+磁极圆环;触点+导电轨道;等等。
例程
初始化编码器,每隔500ms采样一次编码器数值并串口输出显示。
硬件说明
硬件资源:
- 串口UART1
- RA、RB扩展接口(TIM2 32AB正交编码器接口)
- 具有正交编码器电机(需自备)
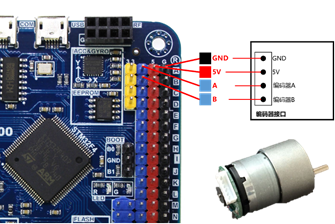
硬件连接:
软件生态
X-SOFT软件生态,X-API扩展文件如下。
ax_encoder.c——X-CTR100 电机正交编码器源文件
ax_encoder.h——X-CTR100 电机正交编码器头文件
接口函数
|
void AX_ENCODER_TIM2_AB_Init(uint32_t cycle); //编码器AB初始化(32位) uint32_t AX_ENCODER_TIM2_AB_GetCounter(void); //编码器AB获取计数器数值 void AX_ENCODER_TIM2_AB_SetCounter(uint32_t count); //编码器AB设置计数器数值
void AX_ENCODER_TIM5_CD_Init(uint32_t cycle); //编码器CD初始化(32位) uint32_t AX_ENCODER_TIM5_CD_GetCounter(void); //编码器CD获取计数器数值 void AX_ENCODER_TIM5_CD_SetCounter(uint32_t count); //编码器CD设置计数器数值
void AX_ENCODER_TIM3_GH_Init(uint16_t cycle); //编码器GH初始化 uint16_t AX_ENCODER_TIM3_GH_GetCounter(void); //编码器GH获取计数器数值 void AX_ENCODER_TIM3_GH_SetCounter(uint16_t count); //编码器GH设置计数器数值
void AX_ENCODER_TIM4_KL_Init(uint16_t cycle); //编码器KL初始化 uint16_t AX_ENCODER_TIM4_KL_GetCounter(void); //编码器KL获取计数器数值 void AX_ENCODER_TIM4_KL_SetCounter(uint16_t count); //编码器KL设置计数器数值
void AX_ENCODER_TIM1_OP_Init(uint16_t cycle); //编码器OP初始化 uint16_t AX_ENCODER_TIM1_OP_GetCounter(void); //编码器OP获取计数器数值 void AX_ENCODER_TIM1_OP_SetCounter(uint16_t count); //编码器OP设置计数器数值 |
软件说明
函数初始化编码器,设定编码器计数周期为60000,设置当前值为30000,while循环每隔500ms采样编码器一次,主程序代码如下。
|
int main(void) { //X-CTR100初始化 AX_Init(115200); printf("***电机正交编码器例程***\r\n\r\n");
//模块初始化及配置 AX_ENCODER_TIM2_AB_Init(60000); //32位正交编码器初始化,计数周期60000 AX_ENCODER_TIM5_CD_Init(60000); //32位正交编码器初始化,计数周期60000 AX_ENCODER_TIM3_GH_Init(60000); //16位正交编码器初始化,计数周期60000 AX_ENCODER_TIM4_KL_Init(60000); //16位正交编码器初始化,计数周期60000 AX_ENCODER_TIM1_OP_Init(60000); //16位正交编码器初始化,计数周期60000
//设置编码器当前计数值为30000 AX_ENCODER_TIM2_AB_SetCounter(30000); AX_ENCODER_TIM5_CD_SetCounter(30000); AX_ENCODER_TIM3_GH_SetCounter(30000); AX_ENCODER_TIM4_KL_SetCounter(30000); AX_ENCODER_TIM1_OP_SetCounter(30000);
//X-API测试:5路正交编码器测试 printf("*5路正交编码器测试\r\n");
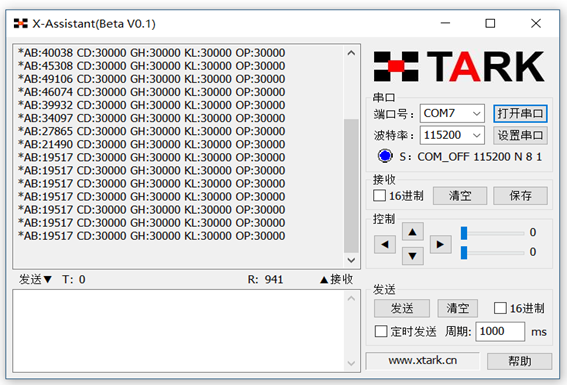
while (1) { printf("*AB:%5d CD:%5d GH:%5d KL:%5d OP:%5d\r\n", AX_ENCODER_TIM2_AB_GetCounter(), AX_ENCODER_TIM5_CD_GetCounter(), AX_ENCODER_TIM3_GH_GetCounter(), AX_ENCODER_TIM4_KL_GetCounter(), AX_ENCODER_TIM1_OP_GetCounter()); AX_Delayms(500); } } |
实现效果
X-CTR100按照编码器接口定义连接编码器,编码器A、B接口线序可更换。手动转动编码器可观察编码器数值变化,一个方向转动编码器数值增加,另一个方向转动编码器数值减小。
参考
https://zhuanlan.zhihu.com/p/20268680
玩转X-CTR100 l STM32F4 l 电机正交编码器的更多相关文章
- 玩转X-CTR100 l STM32F4 l 舵机控制
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器的舵机控制,X-CTR ...
- 玩转X-CTR100 l STM32F4 l ADC 模拟数字转换
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 AD转换接 ...
- 玩转X-CTR100 l STM32F4 l DRV8825 A4988 步进电机控制
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器控制步进电机 ...
- 玩转X-CTR100 l STM32F4 l MPU6050加速度陀螺仪传感器
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 板载加速度 ...
- 玩转X-CTR100 l STM32F4 l DSP指令集性能测试
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 DSP库的 ...
- 玩转X-CTR100 l STM32F4 l X-CTR100与树莓派搭建机器人平台
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器与树莓派Linux系统 ...
- 玩转X-CTR100 l STM32F4 l 基础例程printf、LED、蜂鸣器、拨码开关、位带操作
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器基础板载资源 ...
- 玩转X-CTR100 l STM32F4 l PS2无线手柄
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] SONY的PS2无线手柄是索尼游戏机的遥控手柄,控制 ...
- 玩转X-CTR100 l STM32F4 l FPU单精度浮点性能测试
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器如何开启ST ...
随机推荐
- ubuntu 安装 ftp服务
1. 更新源列表 ---> sudo apt-get update 2. 安装vsftpd ---> sudo apt-get install vsftpd (安装) ----> s ...
- ActiveMQ、RabbitMQ、RocketMQ、Kafka 对比(图示)
RabbitMQ 和 Kafka 对比,一篇好的介绍文章:https://my.oschina.net/u/236698/blog/501834 ActiveMQ.RabbitMQ.RocketMQ. ...
- JDBC中 execute 与 executeUpdate的区别
相同点 execute与executeUpdate的相同点:都可以执行增加,删除,修改 不同点 execute可以执行查询语句 然后通过getResultSet,把结果集取出来 executeUpda ...
- gulp介绍及常用插件
前端构建工具gulpjs的使用介绍及技巧 gulpjs是一个前端构建工具,与gruntjs相比,gulpjs无需写一大堆繁杂的配置参数,API也非常简单,学习起来很容易,而且gulpjs使用的是nod ...
- 阿里云Linux服务器初探
阿里云Linux服务器初探 阿里云Linux服务器初探 因为钱包的关系,本人买了一个660元2年的1核1GB的小服务器(centos是Linux的发行版),在当初是用2核4GB(内存)的时候使用的是w ...
- Pro Git读书笔记 - 分支
Git 分支介绍. 几乎所有的版本控制系统都以某种形式支持分支. 使用分支意味着你可以把你的工作从开发主线上分离开来,以免影响开发主线. 在很多版本控制系统中,这是一个略微低效的过程--常常需要完全创 ...
- MVC ---- DBHelper.ttinclude
在通过T4模版引擎之基础入门 对T4有了初步印象后,我们开始实战篇.T4模板引擎可以当做一个代码生成器,代码生成器的职责当然是用来生成代码(这不是废话吗).而这其中我们使用的最普遍的是根据数据库生成实 ...
- MVC ---- 如何使用Action委托
先建立一个Serven 类 public class Seven { public static void TestSeven1() { List<User> userList = Fiv ...
- OSError: [WinError 193] %1 不是有效的 Win32 应用程序。
经过搜索查找,发现错误原因是我在win7 x64的机器上装了64位的python IDLE,不能有效load32位的dll,换成32位的python就好了.
- nginx 80 端口默认被占用
/etc/nginx/sites-enabled,修改该目录下的default文件, 将默认端口号80改为其他端口号, /etc/nginx/nginx.conf 文件配置里的80端口就会生效