lua行为树设计与实现
项目需要,之前行为树用的是behaviorDesigner,要改成纯lua的
我先做了一版用递归实现,代码可读性高但是中断机制实现起来比较复杂,而且创建自定义action重写方法时需要调用父类的方法, 如果忘了调用就会出现问题, 所以改成了用栈模拟递归。
用栈模拟递归好处在于效率高,并且容易控制,用非递归实现后自定义一个行为树节点,那么该节点不用知道父亲的方法,只要做好自己的事情就OK了
完整测试工程已上传到了github:https://github.com/MCxYY/LuaBT
行为树整体结构
(和BehaviorDesigner很像,因为就是参考BehaviorDesigner设计的,要做的是c#移植成lua,移植成本尽可能低)
如上,base文件夹中是行为树核心逻辑,最好不要修改,其他几个文件夹是自定义节点,如果是Action节点那么继承Base中的Action.lua;如果是Composite节点则继承Composite.lua等
行为树类结构大致如下:(出于篇幅限制,有些方法没写出来)

其中BTManager存储着所有行为树BTree,unity每帧调用BTManager的Update,而BTManager调用所有运行中的BTree的Update,BTree管理着自身的节点Task,根据逻辑执行调用Task的OnAwake()、OnStart等
Shared是节点共享数据,在后文中讲述
Task的OnAwake是整颗行为树激活时运行一次
OnStart是进入该Task时运行一次
OnUpdate是该Task执行中时每帧运行一次
OnPause(bPause)是整棵行为树暂停或者从暂停中苏醒时运行,bPause为true则暂停
OnEnd()是该Task退出时运行一次
运行逻辑
行为树(BTree)启动的时候调用BTree.Init()方法先序遍历该树,获得一系列节点数据,比如赋值儿子index,每个节点的儿子index是什么,每个节点的父亲index等,代码如下:
--先序遍历,root的index为1、父亲index为0
function BT.BTree:Init(task, parentIndex, compositeIndex)
task:Init(self)
task:OnAwake()
local curIndex = #self.tTaskList +
table.insert(self.tTaskList,task) --赋值task的index
table.insert(self.tParentIndex,parentIndex) --可以找到其父亲的index
table.insert(self.tParentCompositeIndex,compositeIndex) --可以找到是Composite类型且离自己最近的祖先的index,用于中断评估 if task:CheckType(BT.ParentTask) then
if task:CheckChildCount() == false then
LogMgr.Error(BT.ErrorRet.ChildCountMin.." index = "..curIndex.." count = "..#task.tChildTaskList)
return
end
self.tChildrenIndex[curIndex] = {}
self.tChildConditionalIndex[curIndex] = {}
for i = , #task.tChildTaskList do
table.insert(self.tRelativeChildIndex,i) --该task在其父亲中处于第几个
table.insert(self.tChildrenIndex[curIndex],#self.tTaskList + ) --可以找到其所有儿子的index
if task:CheckType(BT.Composite) then
self:Init(task.tChildTaskList[i], curIndex, curIndex)
else
self:Init(task.tChildTaskList[i], curIndex, compositeIndex)
end
end
else
if task:CheckType(BT.Conditional) then
--可以找到是Conditional类型且离自己最近的子孙的index,用于中断评估
table.insert(self.tChildConditionalIndex[self.tParentCompositeIndex[curIndex]],curIndex)
end
end
end
行为树(BTree)中存储着一个list<stack<taskindex>>,这个是运行栈,行为树启动时创建一个运行栈,塞进去树根;每当有并行分支,则创建一个运行栈,塞进去分支第一个运行的节点。
节点(Task)的状态有四种:
1、ETaskStatus.Inactive //未激活
2、ETaskStatus.Failure //失败
3、ETaskStatus.Success //成功
4、ETaskStatus.Running //运行中
运行栈中放的节点都是处于Running状态,update时遍历运行栈,取出栈顶节点执行,如果节点执行完毕后状态不等于running,说明该节点不需要再次运行,那么就出栈,代码如下:
function BT.BTree:Update()
--进入评估阶段,中断修改运行栈
self:ConditionalReevaluate()
local status
if #self.tRunStack == then
return BT.ETaskStatus.Inactive
end
--遍历执行所有栈
for i = #self.tRunStack,,- do
repeat
if self.tRunStack[i] == Const.Empty then
table.remove(self.tRunStack,i)
break
end
status = BT.ETaskStatus.Inactive
while status ~= BT.ETaskStatus.Running do
if self.tRunStack[i] ~= Const.Empty then
status = self:RunTask(self.tRunStack[i]:Peek(),i)
else
break
end
end
until(true)
end
return BT.ETaskStatus.Running
end
节点运行的时候
如果该节点是ParentTask类型则需要运行儿子,其状态由儿子执行完毕后的状态来决定
如果该节点是Task类型没有儿子,那么其状态就是其Update的状态
递归实现那么代码大致如下:
status task.runParent(){
for task.childList {
if typeOf(task.childItem) == ParentTask {
status = task.childItem.runParent()
}
else{
status = task.childItem.OnUpdate()
}
if task.CanExcute(status) == false{
return task.status
}
}
return task.status
}
栈实现虽然麻烦点,但思路还是一样的,多了出栈入栈和其他一些操作
RunTask()
function BT.BTree:RunTask(taskIndex, stackIndex)
local task = self.tTaskList[taskIndex]
self:PushTask(taskIndex,stackIndex) local status = BT.ETaskStatus.Inactive if task:CheckType(BT.ParentTask) then
status = self:RunParentTask(taskIndex,stackIndex)
else
status = task:OnUpdate()
end if status ~= BT.ETaskStatus.Running then
self:PopTask(stackIndex, status)
end
return status
end
RunParent()
function BT.BTree:RunParentTask(taskIndex, stackIndex)
local task = self.tTaskList[taskIndex]
local curRelChildIndex = -
local preRelChildIndex = -
while task:CanExcute() do
curRelChildIndex = task:GetCurChildIndex()
if curRelChildIndex == preRelChildIndex then
return BT.ETaskStatus.Running
end
local childIndex = self.tChildrenIndex[taskIndex][curRelChildIndex]
if childIndex == nil then
break
end
--这个主要是为并行节点服务的
--其他类型的节点都是儿子执行完毕主动通知父亲然后curChildIndex指向下个儿子
--但是并行节点是所有儿子一开始都同时执行
task:OnChildStart(curRelChildIndex)
if task:CanExcuteParallel() then
--并行节点创建新的分支
local newStack = Stack:New()
table.insert(self.tRunStack, newStack)
newStack:Push(childIndex)
self:RunTask(childIndex, #self.tRunStack)
else
self:RunTask(childIndex, stackIndex)
end
preRelChildIndex = curRelChildIndex
end
return task:GetStatus()
end
节点共享数据
节点共享数据分为三种:一,树之间任意节点全局共享的数据 二,树内任意节点共享的数据 三,节点内不共享数据
节点内数据那就不用说了,在节点内声明的数据都是节点内数据
BehaviorDesigner的共享数据是通过编辑器保存读取的
由于时间不允许,没有做编辑器,所以我就做了个存储的类简单的实现了下
Shared.lua就是存储的类,其实里面就是一个table,对外只提供一个GetData(name)的方法,如果没有name的变量就创建个值为空的table保存起来,返回这个table
结构大致是data = {
name1 = {name = name1, val = val1},
...
name2 = {name = name2, val = val2},
}
之所以用table存,是因为table在lua中属于引用类型
shared.lua代码如下:
BT.Shared = {}
BT.Shared.__index = BT.Shared
function BT.Shared:New()
local o = {}
setmetatable(o,BT.Shared)
o.data = {} -- val is [name] = {name = name,val = val}
return o
end
function BT.Shared:GetData(name)
if self.data[name] == nil then
self.data[name] = {name = name,val = nil}
end
return self.data[name]
end
那么全局共享数据放在BTManager中,使得树都可以访问
树内共享数据放在树中
在树执行Init时将树传给task
代码如下:
BT.Mgr = {
...
globalSharedData = BT.Shared:New()
}
function BT.BTree:New(gameObject, name)
local o = {}
setmetatable(o,this)
...
o.sharedData = BT.Shared:New()
o.globalSharedData = BT.Mgr.globalSharedData
...
}
function BT.BTree:Init(task, parentIndex, compositeIndex)
task:Init(self)
...
}
中断的实现
中断的实现应该是行为树中比较复杂的功能了,涉及到树上的一些算法及运行栈的操作,牵涉到的判断也多,这里会重点讲述
中断必要的原因是可能存在以下情况(不限于此情况):
比如怪物正在向目标点移动的时候遇到玩家需要攻击,此时移动的节点状态是running,没有中断的时候只能走到目标点的时候返回success停止移动才开始进入其他节点,这时候就错过了攻击玩家,中断的作用就体现出来了,就算是在running状态也能打断运行栈进入攻击节点
BehaviorDesigner打断的方法是将打断类型分为这么几类:
EAbortType = {
None = 0, //不打断
Self = 1, //打断自身
LowerPriority = 2, //打断低优先级
Both = 3, //同时包括Self和LowerPriority两种效果
}
其中只有Composite类型的节点可以拥有打断操作
Self打断类型:指的是Composite节点下面的直系子孙(这个名词是我临时取得。。意思是Composite与Conditional中间可以插入Decorate,可以插入Composite但插入得Composite类型必须是Self或Both)Conditional类型的节点的状态发生变化时,那么打断正在运行且是Composite子孙的分支,重新进入变化的Conditional节点所处的分支中。打断的结构大概如下图所示:

(绿色的指正在运行中的节点)
那么Conditional变化时可以打断Task2,当然如果Task1处于运行时也可以打断,因为Composite2的打断类型为Self且Composite3的打断类型也是Self,即AbortType是可以递归的
运行栈回退到Composite和运行节点的最近公共祖先节点,在此图中回退到Composite3节点处。
假设Composite2的打断类型是None或者LowerPriority且正在运行的是Task1,那么就不会打断
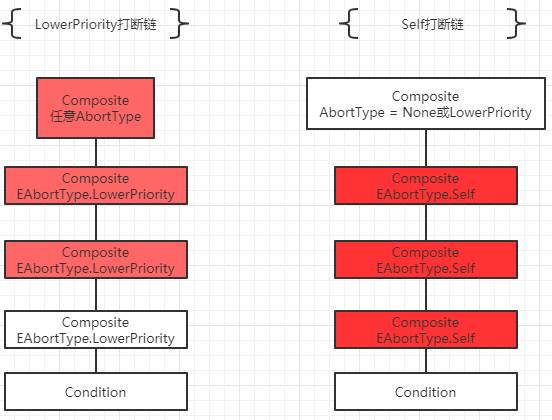
LowerPriority打断类型:指的是当Composite直系子孙(意思同上,只是插入的Composite必须是LowerPriority或Both)Conditional类型的节点的状态变化时,那么打断运行节点所处分支是Composite兄弟节点分支,打断结构如下图所示:

假设正在运行的是Task1,那么不可以打断
通过以上的例子,我们可以知道,从Composite到Conditional是一条链也就是打断链,将打断链存储下来,每次树update的时候先判断运行分支是否和打断链上的节点处于同一分支,那么就可以打断
Self打断链和LowerPriority的打断链如图所示:(当运行分支处于红色节点分支中,则可以打断)
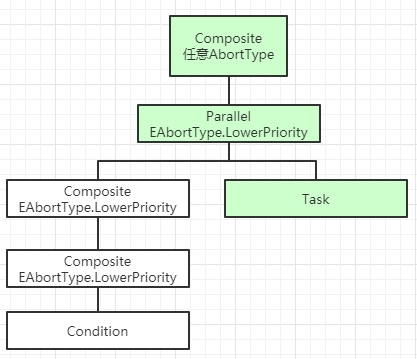
当然还有一种情况例外,比如并行节点Parallel,也属于Composite,但是两个子分支之间是不能打断的,如下图所示,不能打断Task,因为Conditional和Task是两个运行栈
通过上面所说,我们只需要算出打断链算出来并存储下来进行计算即可。
只有Conditional进行过一次才可以进行中断评估
那么在节点出栈的时候进行计算,将打断链接上自己的父亲,或者删除打断链,代码如下所示:
function BT.BTree:PopTask(stackIndex, status)
...
...
--reevaluate
local parentCompositeIndex = self.tParentCompositeIndex[taskIndex]
local parentComposite = self.tTaskList[parentCompositeIndex] --如果节点是Conditional类型且父亲Composite有中断类型,那么创建中断链保存起来
if task:CheckType(BT.Conditional) then
if parentComposite ~= nil and parentComposite.abortType ~= BT.EAbortType.None then
if self.tConditionalReevaluateDic[taskIndex] == nil then
local reevaluate = BT.Reevaluate:New(taskIndex, status, stackIndex, parentComposite.abortType == BT.EAbortType.LowerPriority and or parentCompositeIndex, parentComposite.abortType)
table.insert(self.tConditionalReevaluate,reevaluate)
self.tConditionalReevaluateDic[taskIndex] = reevaluate
end
end
elseif task:CheckType(BT.Composite) then repeat
--LowerPriority延迟指向
if task.abortType == BT.EAbortType.LowerPriority then
for i = , #self.tChildConditionalIndex[taskIndex] do
local reevalute = self.tConditionalReevaluateDic[self.tChildConditionalIndex[taskIndex][i]]
if reevalute ~= nil then
reevalute.compositeIndex = taskIndex
end
end
end --指向自己的reevalute重新指向自己的父亲
local lam_BothOrOther = function(tab,abortType)
if tab.abortType == abortType or tab.abortType == BT.EAbortType.Both then
return true
end
return false
end for i = , #self.tConditionalReevaluate do
local reevalute = self.tConditionalReevaluate[i]
if reevalute.compositeIndex == taskIndex then
if lam_BothOrOther(task,BT.EAbortType.Self) and lam_BothOrOther(parentComposite,BT.EAbortType.Self) and lam_BothOrOther(reevalute,BT.EAbortType.Self) or
lam_BothOrOther(task,BT.EAbortType.LowerPriority) and lam_BothOrOther(reevalute,BT.EAbortType.LowerPriority)
then
reevalute.compositeIndex = parentCompositeIndex
if reevalute.abortType == BT.EAbortType.Both then
if task.abortType == BT.EAbortType.Self or parentComposite.abortType == BT.EAbortType.Self then
reevalute.abortType = BT.EAbortType.Self
elseif task.abortType == BT.EAbortType.LowerPriority or parentComposite.abortType == BT.EAbortType.LowerPriority then
reevalute.abortType = BT.EAbortType.LowerPriority
end
end
end
end
end --自己已经出栈,删除目前还指向自己的中断链
for i = #self.tConditionalReevaluate,,- do
local reevalute = self.tConditionalReevaluate[i]
if reevalute.compositeIndex == taskIndex then
self.tConditionalReevaluateDic[reevalute.index] = nil
table.remove(self.tConditionalReevaluate,i)
end
end
until(true) end
if stack:Empty() then
self.tRunStack[stackIndex] = Const.Empty
end
task:OnEnd()
end
经过上一步就计算并保存了中断链,接下来就是打断操作,代码如下所示:
--遍历所有的中断链
function BT.BTree:ConditionalReevaluate()
for i = , #self.tConditionalReevaluate do
repeat
local reevalute = self.tConditionalReevaluate[i]
if reevalute == nil or reevalute.compositeIndex == then
break
end
local status = self.tTaskList[reevalute.index]:OnUpdate()
if status == reevalute.status then
break
end
--打断
local bBreak = false
for stackIndex = , #self.tRunStack do
repeat
if self.tRunStack[stackIndex] == Const.Empty then
break
end
local runIndex = self.tRunStack[stackIndex]:Peek()
local lcaIndex = self:LCA(reevalute.compositeIndex,runIndex)
--只有在reevaluate打断链上的运行节点才能被打断
if not self:IsParent(reevalute.compositeIndex,lcaIndex) then
break
end
--如果运行节点和reevaluate的conditional处于同一个并行节点的不同分支上,不能被打断
if stackIndex ~= reevalute.stackIndex and self.tTaskList[self:LCA(reevalute.index,runIndex)]:CanExcuteParallel() then
break
end if reevalute.abortType == BT.EAbortType.LowerPriority and self.tParentCompositeIndex[reevalute.index] == self.tParentCompositeIndex[runIndex] then
break
end --更改运行栈
while true do
if self.tRunStack[stackIndex] == Const.Empty or self.tRunStack[stackIndex]:Empty() then
break
end
runIndex = self.tRunStack[stackIndex]:Peek()
if runIndex == lcaIndex then
self.tTaskList[lcaIndex]:OnConditionalAbort()
break
end
self:PopTask(stackIndex,BT.ETaskStatus.Inactive)
end
bBreak = true
until(true)
end if not bBreak then
break
end
--删除同一个中断链且优先级较低的reevalute
for j = #self.tConditionalReevaluate, i,- do
local nextReevalute = self.tConditionalReevaluate[j]
if self:IsParent(reevalute.compositeIndex,nextReevalute.index) then
self.tConditionalReevaluateDic[nextReevalute.index] = nil
table.remove(self.tConditionalReevaluate,j)
end
end
until(true)
end
end
至此,行为树讲述完毕
欢迎转载,转载请注明出处:https://www.cnblogs.com/McYY/p/11689623.html,谢谢
lua行为树设计与实现的更多相关文章
- [Unity插件]Lua行为树(四):条件节点和行为节点
条件节点和行为节点,这两种节点本身的设计比较简单,项目中编写行为树节点一般就是扩展这两种节点,而Decorator和Composite节点只需要使用内置的就足够了. 它们的继承关系如下: Condit ...
- [Unity插件]Lua行为树(三):组合节点Sequence
Sequence的继承关系如下: Sequence->Composite->ParentTask->Task 上一篇已经实现了简单版本的ParentTask和Task(基于Behav ...
- [Unity插件]Lua行为树(十二):行为树管理
之前运行的行为树,都是一颗总树,那么实际上会有很多的总树,因此需要对行为树进行管理. BTBehaviorManager.lua BTBehaviorManager = {}; local this ...
- [Unity插件]Lua行为树(九):条件节点调整
先看一下之前的条件节点是怎么设计的: BTConditional.lua BTConditional = BTTask:New(); local this = BTConditional; this. ...
- [Unity插件]Lua行为树(八):行为节点扩展
先看一下之前的行为节点是怎么设计的: BTAction.lua BTAction = BTTask:New(); local this = BTAction; this.taskType = BTTa ...
- [Unity插件]Lua行为树(七):行为树嵌套
在上一篇的基础上,可以测试下行为树的嵌套,所谓的行为树嵌套,就是在一棵行为树下的某一个分支,接入另一棵行为树. 以下面这棵行为树为例: TestBehaviorTree2.lua TestBehavi ...
- [Unity插件]Lua行为树(六):打印树结构
经过前面的文章,已经把行为树中的四种基本类型节点介绍了下.接下来可以整理一下,打印一下整棵行为树.注意点如下: 1.可以把BTBehaviorTree也当作一种节点,这样就可以方便地进行行为树嵌套了 ...
- [Unity插件]Lua行为树(二):树结构
参考链接:https://blog.csdn.net/u012740992/article/details/79366251 在行为树中,有四种最基本的节点,其继承结构如下: Action->T ...
- [Unity插件]Lua行为树(一):BehaviorDesigner源码分析
BehaviorDesigner是Unity上的一款行为树插件,不过这个插件是用C#编写的,编写出来的行为树也是依赖于C#的,不利于热更,所以有必要写一个lua版本的. 首先下载BehaviorDes ...
随机推荐
- 第一次作业:学习C++指针
1 内存空间的访问方式 计算机的内存存储器被划分为一个个存储单元.储存单元按一定的规则编号,这个编号就是存储单元的地址.地址编码的基本单位是字节,每个字节由8个二进制位组成,也就是说每个字节是一个基本 ...
- Java中的java.lang.Class API 详解
且将新火试新茶,诗酒趁年华. 概述 Class是一个位于java.lang包下面的一个类,在Java中每个类实例都有对应的Class对象.类对象是由Java虚拟机(JVM)自动构造的. Class类的 ...
- NTP服务器实现
时间服务器是一种计算机网络仪器,它从参考时钟获取实际时间,再利用计算机网络把时间信息传递给用户.虽然还有一些比较少用或过时的协议仍然在使用,但现时最重要及广泛使用,作为时间信息发送和同步化的协议是网络 ...
- 【学习笔记】第八章 python3核心技术与实践--条件与循环
[第七章]思考题答案,仅供参考:
- 让你的AI模型尽可能的靠近数据源
来源:Redislabs作者:Pieter Cailliau.LucaAntiga翻译:Kevin (公众号:中间件小哥) 简介 今天我们发布了一个 RedisAI 的预览版本,预集成了[tensor ...
- 03 jvm的组成
声明:本博客仅仅是一个初学者的学习记录.心得总结,其中肯定有许多错误,不具有参考价值,欢迎大佬指正,谢谢!想和我交流.一起学习.一起进步的朋友可以加我微信Liu__66666666 这是简单学习一遍之 ...
- 苹果系统IOS第三方管理工具——imazing 优秀
iMazing 是一款 Windows.macOS 平台的 iPhone.iPad 管理工具,可以进行文件.音乐.视频传输,备份与还原数据,并且可以管理已安装应用,比如重新安装那些已下架的应用,是「史 ...
- [Boost库] noncopyable——禁止拷贝的类
1.noncopyable允许程序轻松地实现一个禁止拷贝的类,在头文件<boost/noncopyable.hpp>中 2.实现原理很简单:noncopyable的实现就是用了C++中 ...
- (java实现)单向循环链表
什么是单向循环链表 单向循环链表基本与单向链表相同,唯一的区别就是单向循环链表的尾节点指向的不是null,而是头节点(注意:不是头指针). 因此,单向循环链表的任何节点的下一部分都不存在NULL值. ...
- Python邮件发送功能
import smtplibfrom email.mime.text import MIMEText_user = "1147016115@qq.com"#发件人_pwd = &q ...