FPGA驱动步进电机
步进电机
步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
五线四相步进电
机是从两个线圈中间引出两根线,作为公共端,因此有5根线。

五线四相步进电机一般采用8拍进行驱动。
verilog代码实现
//--------------------------------------------------------------
//功能:这是五线四相电机驱动模块,输入PWM.DIR,EN就可以控制电机的转动
//PWM:脉冲数越多电机转的角度或者圈数越多,PWM的频率越高,电机转速越快
//RST_n:低电平下降沿复位
//EN:使能信号
//M_OUT:电机控制时序输出引脚
//--------------------------------------------------------------- module motor_sig(
PWM, //驱动脉冲输入,脉冲数决定转的圈数,脉冲频率决定转速
RST_n,//低复位
DIR,//方向
EN,//使能信号,1:有效 0:关闭
//五线四相电机的输出引脚
M_OUT
); input PWM,RST_n,DIR,EN;
output [:]M_OUT;//【a,b,c,d】
reg [:]motor_ctl; always@(negedge RST_n or posedge PWM)
begin
if(!RST_n)begin
motor_ctl <= 'b0000;
end
else begin
if(EN)begin//使能信号有效
if(DIR)begin//CCW
case(motor_ctl)
'b0000: motor_ctl <= 4'b1000;
'b1000: motor_ctl <= 4'b1100;
'b1100: motor_ctl <= 4'b0100;
'b0100: motor_ctl <= 4'b0110;
'b0110: motor_ctl <= 4'b0010;
'b0010: motor_ctl <= 4'b0011;
'b0011: motor_ctl <= 4'b0001;
'b0001: motor_ctl <= 4'b1001;
'b1001: motor_ctl <= 4'b1000;
default:motor_ctl <= 'b1000;
endcase
end
else begin //CW
case(motor_ctl)
'b0000: motor_ctl <= 4'b1001;
'b1001: motor_ctl <= 4'b0001;
'b0001: motor_ctl <= 4'b0011;
'b0011: motor_ctl <= 4'b0010;
'b0010: motor_ctl <= 4'b0110;
'b0110: motor_ctl <= 4'b0100;
'b0100: motor_ctl <= 4'b1100;
'b1100: motor_ctl <= 4'b1000;
'b1000: motor_ctl <= 4'b1001;
default:motor_ctl <= 'b1000;
endcase
end
end
end
end assign M_OUT[:] = motor_ctl[:]; endmodule
仿真结果

四线二相步进电机
这种步进电机相当于五线四相步进电机没有引出抽头。如果将五线四相步进电机引出的抽头不使用。且两个抽头没有连接在一起,可以将其作为二相电机使用。

四线二相步进电机的驱动有八拍和四拍的。
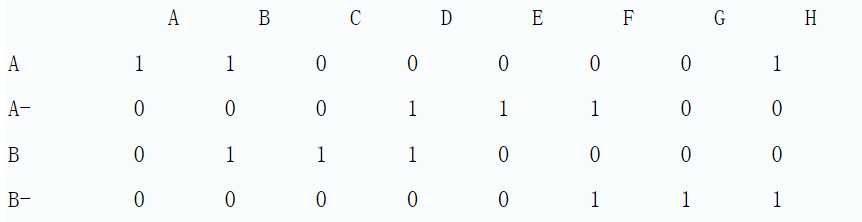
八拍驱动时序:
八个状态:1、在 A 与 A-正电压,B 与 B-不给电悬空;2、在 A 与 A-正电压,B与 B-也给正电压;3、A 与 A-不给电压悬空,B 与 B-正电压;4、A 与 A-给负电压,B与B-给正电压;5、A与A-给负电压,B 与B-不给悬空;6、A与A-给负电压,B与B-给负电压;7、A 与A-不给电悬空,B 与 B-给负电压;8、A 与给正电压,B 与 B-给负电压;按以上八个状态轮流供电,控制一下脉宽就可以了。
实现
//--------------------------------------------------------------
//功能:这是四线二相电机驱动模块,输入PWM.DIR,EN就可以控制电机的转动
//PWM:脉冲数越多电机转的角度或者圈数越多,PWM的频率越高,电机转速越快
//RST_n:低电平下降沿复位
//EN:使能信号
//M_OUT:电机控制时序输出引脚
//--------------------------------------------------------------- module motor_sig_42(
PWM, //驱动脉冲输入,脉冲数决定转的圈数,脉冲频率决定转速
RST_n,//低复位
DIR,//方向
EN,//使能信号,1:有效 0:关闭
//四线二相电机的输出引脚
M_OUT
); input PWM,RST_n,DIR,EN;
output [:]M_OUT;//【A+,A-,B+,B-】
reg [:]motor_ctl; always@(negedge RST_n or posedge PWM)
begin
if(!RST_n)begin
motor_ctl <= 'b0000;
end
else begin
if(EN)begin//使能信号有效
if(DIR)begin//CCW
case(motor_ctl)
'b0000: motor_ctl <= 4'b1000;
'b1000: motor_ctl <= 4'b1010;
'b1010: motor_ctl <= 4'b0010;
'b0010: motor_ctl <= 4'b0110;
'b0110: motor_ctl <= 4'b0100;
'b0100: motor_ctl <= 4'b0101;
'b0101: motor_ctl <= 4'b0001;
'b0001: motor_ctl <= 4'b1001;
'b1001: motor_ctl <= 4'b1000;
default:motor_ctl <= 'b1000;
endcase
end
else begin //CW
case(motor_ctl)
'b0000: motor_ctl <= 4'b1001;
'b1001: motor_ctl <= 4'b0001;
'b0001: motor_ctl <= 4'b0101;
'b0101: motor_ctl <= 4'b0100;
'b0100: motor_ctl <= 4'b0110;
'b0110: motor_ctl <= 4'b0010;
'b0010: motor_ctl <= 4'b1010;
'b1010: motor_ctl <= 4'b1000;
'b1000: motor_ctl <= 4'b1001;
default:motor_ctl <= 'b1000;
endcase
end
end
end
end assign M_OUT[:] = motor_ctl[:]; endmodule
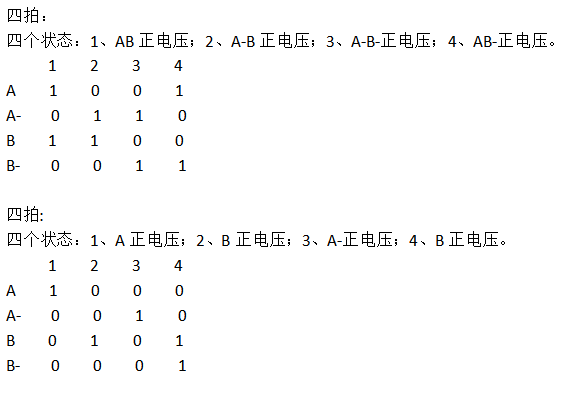
四拍驱动时序
总结
该模块可通过控制PWM信号实现电机旋转角度和旋转速度的控制,方便使用,移植方便。
FPGA驱动步进电机的更多相关文章
- python代码实现树莓派3b+驱动步进电机
python代码实现树莓派3b+驱动步进电机 之前买了个树莓派,刚买回来那会儿热情高涨,折腾了一段时间,然后就放那吃灰了.前几天忽然想起来这个东西了,决定再玩玩儿,于是就从某宝上购买了一套步进电机.驱 ...
- arduino中驱动 步进电机
参考:https://www.arduino.cn/thread-75936-1-1.html 知识点: 步进电机是一种将电脉冲转化为角位移的执行机构.通俗一点讲:当步进驱动器接收到一个脉冲信号 ...
- FPGA驱动VGA显示静态图片
一 .前言 本文设计思想采用明德扬至简设计法.VGA是最常见的视频显示接口,时序也较为简单.本文从利用显示屏通过VGA方式显示测试图案及静态图片着手带大家接触图像显示应用,算是为后续VGA显示摄像头采 ...
- FPGA驱动LCD显示红绿蓝彩条
实验目的:先简单熟悉LCD灯的驱动和时序图的代码实现.设计功能是让LCD显示红绿蓝三种颜色,即三个彩带.本次实验比较容易实现,主要是对LCD驱动时序图的理解和时序参数的配置. 实验条件:1.LCD原理 ...
- 使用Pretues仿真Arduino驱动步进电机
这几天想做一个给金鱼自动喂食的装置,所以学习了下如何操控步进电机,现在做个记录. 使用Pretues仿真Arduino的话,可以参考:http://www.geek-workshop.com/thre ...
- arduino驱动步进电机
https://learn.adafruit.com/adafruit-motor-shield-v2-for-arduino/install-software 1安装库 Adafruit_Motor ...
- 使用STM32控制TMC5160驱动步进电机
首先先来了解一下TMC5160的3种工作模式 TMC5160通过两个引脚来控制它的工作模式:SD_MODE和SPI_MODE. 1.当SD_MODE接地,SPI_MODE拉高,TMC5160即工作在模 ...
- 基于FPGA驱动VGA显示图片的小问题
学习VGA显示图片的过程中,遇到了一个小问题,我在显示屏上开了一个60x60的框,放了一张图片进去显示,但是最终的结果如下图所示. 出现了一个竖黑边,看了看代码,分析了一下逻辑没问题,然而看这个显示那 ...
- Arduino ULN2009驱动步进电机
一.实物图 二.例子代码 注:代码来自老外 http://www.4tronix.co.uk/arduino/Stepper-Motors.php 功能:控制电机正反转 // This Arduino ...
随机推荐
- NPOI helper
using NPOI.HSSF.UserModel; using NPOI.HSSF.Util; using NPOI.SS.UserModel; using NPOI.XSSF.UserModel; ...
- 记录4-Ubuntu 16.04用gparted调整分区
几天在安装双系统时,没注意居然把swap分区设置成了50G.今天才发现,于是用gparted重新分区. 1. sudo apt-get install gparted 2. 重新用u盘启动进入ubun ...
- C#学习-图解教程(2):访问修饰符(其中两种)
学习内容:C#:学习书籍:图解教程(中文第四版). 目录:第四章 类的基本概念 -----> 4.8 访问修饰符 访问修饰符 从类的内部,任何函数成员都可以使用成员的名称访问类中任意的其他成员. ...
- [转]AJAX POST请求中参数以form data和request payload形式在servlet中的获取方式
转载至 http://blog.csdn.net/mhmyqn/article/details/25561535 最近在写接收第三方的json数据, 因为对java不熟悉,有时候能通过request能 ...
- Python的迭代器和生成器
列表生成式 列表生成式可以快速创建list. >>> [x * x for x in range(1, 11) if x % 2 == 0] [4, 16, 36, 64, 100] ...
- hash加密
hash import hashlib content = 'its so coll'.encode('utf8') o = hashlib.sha1() # 创建一个hash对象 o.update( ...
- 001.[python学习]写在前面的
0.多动手写写也许你所说的问题就不是问题: 1.最好的帮助文档是dir和help,如下图: 2.如果为了快速完成任务可以选择IDE,否则尽量不要依赖它,因为它的智能导致自己的无能: 3.也许有其他语言 ...
- py库:threading
https://www.youtube.com/watch?v=DnTn3Yx-Nvg join功能: import threading import time def thread_job2(): ...
- 【C语言基础】变量
1.什么是变量? 变量的本质就是内存中一段储存空间 2.变量为什么必须初始化? 所谓初始化就是赋值的意思 3.如何定义变量 数据类型 变量名 = 要赋的值 举例子: int i = 3:等价于 int ...
- AES/CBC/PKCS7Padding加密方式
在网上找了大半天资料,终于找到一个可以用的 public static class AES { // 算法名称 final static String KEY_ALGORITHM = "AE ...