AVIRIS 简介

AVIRIS 是指 机载可见光近红外成像光谱(Airborne Visible InfraRed Imaging Spectrometer)。是由美国NASA下属的喷气动力实验室(JPL)开发和维护的光谱成像设备。现有两代产品:AVIRIS-Classic 和AVIRIS-NG(AVIRIS Next Generation),其中AVIRIS-Classict从1986年开始服役,目前网站上提供从1992年开始至2020年采集高光谱图像数据,主要为地面辐亮度图像,少部分图像提供反射率图像。AVIRIS-NG则提供从2012年至2020年的高光谱图像数据。所有的图像均进行了几何矫正,具有真实的地理坐标信息。目前AVIRIS-Classic提供的数据主要位于美国本土,还有少量太平洋中海岛、以及加拿大和欧洲地区的数据。AVIRIS-NG则目前主要提供欧洲和印度区域数据。
1. AVIRIS-Classic

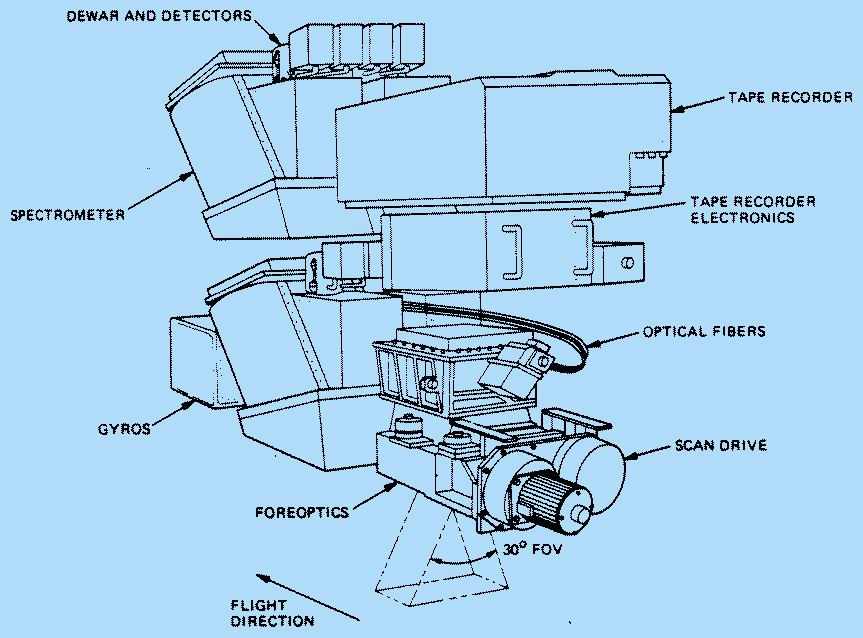
AVIRIS是地球遥感领域的先进设备。其具备一个独特的光学传感器,能够采集波长在400~2500nm范围内的上行的光谱辐亮度信息,并进行辐亮度矫正,最终生成具有224个连续光谱通道(波段)的高光谱图像。AVIRIS曾经搭载在4种不同的飞行平台上, 分别为:NASA 的ER-2 喷气式飞机,Twin Otter International 的涡轮螺旋桨飞机,Scaled Composites’ Proteus(一种双翼高空长航时飞机)以及NASA的WB-57飞机。 ER-2飞机飞行高度约为海拔20km,航速为730km/h,Twin Otter的飞机飞行高度约为地面上4km,航速约为130km/h。 AVIRIS在主要在美国各地进行执行飞行任务,此外还在欧洲和加拿大执行任务[1]。
- 设备基本参数
| 参数名称 | 参数值 |
|---|---|
| 数据码率 | 1994年:17Mbps 1995~2004年:20.4Mbps 2005~今:16Bit |
| 数据量化 | 1994年:10bit 1995年~今:12bit |
| 探测器类型 | 可见光波段:Si探测器 近红外波段(NIR):InGaAr 短波红外(SWIR):InSb 液氮(LN2)制冷探测器 |
| 成像方式 | 摆扫式(Whisk broom) |
| 扫描速率 | 12Hz |
| 光谱带宽 | 10nm标称波段宽度,经过矫正,误差±1nm |
| 视场角(FOV) | 34°,总计677个像素 |
| 单像素视场角(IFOV) | 1 mrad |
- 数据下载门户网站
- 从2006年至今的数据,可以从
AVIRIS Data Product Portal网站下载:https://aviris.jpl.nasa.gov/dataportal/ - 1992年至2005年的数据,需要从网站http://aviris.jpl.nasa.gov/locator_select.php首先搜索需要的飞行记录,然后填写AVIRIS Archive Data Request form 申请数据下载
- 从2006年至今的数据,可以从
2. AVIRIS-NG

AVIRIS-NG是用来采集太阳反射光谱范围内的高信噪比连续光谱图像,并希望能够接替从1986年开始服役AVIRIS-Classic设备。其数据成果可以广泛运用于生态环境、土壤地质、内陆湖泊、冰雪、生物质燃烧、大气、环境污染、农业等多种研究中。
AVIRIS-NG能够以5nm的光谱分辨率采集波长在380~2510nm范围的连续光谱图像。目前该设备已经成功搭载在Twin Otter平台上,以0.3m~4m的空间分辨率采集了光谱图像数据,单条扫描线包含600个像素。在不久的将来计划搭载在具有更高飞行高度的NASA ER-2平台上。 AVIRIS-NG的跨条带(Cross-track)光谱一致性优于95%,且光谱维IFOV一致性优于95%。[2]


- 设备基本参数
| Parameter | Value |
|---|---|
| 波长范围(Wavelength) | 380 nm to 2510 nm |
| 光谱分辨率 (FWHM, minimum) | 5nm ± 0.5 nm |
| FOV(Field of View) | 36 ± 2 degrees with 600 resolved elements |
| IFOV(Instantaneous Field of View) | 1.0 1.4 mrad ± mrad |
| Spatial Sampling (maximum observed at resolved elements) | 1.0 mrad ± 0.1 mrad |
| Spectral Distortion (smile) | Uniformity > 97% |
| Spectral Distortion (keystone) | Unformity >97% |
| 空间和光谱分辨率(FPA) | 480 (spectral direction) X 640 (cross track) |
| 帧率(Frame Rate) | 10 - 100 frames per second |
| Pixel Size | 27 microns x 27 microns |
| Calibration | On-board calibrator |
| 数据量化(Data Resolution) | 14 bits |
| Data Rate | Up to 74 MB/s of throughput |
| Data Volume | Up to 1.0 TB of raw data before disk swap |
| Physical Volume | 83 cm (H) x 57 cm (Dia.) plus electronics boxes and racks |
| Mass | 465kg |
| Vacuum Requirement | 10-4 torr |
| Ambient Operating Temperature | -40 to +50C |
| Maximum Altitude | 18 km |
| Cool-Down Time | < 48 hours |
| Operational Time / Mission | 14 days |
数据下载门户网站
- 2014年~2020年的数据可以从
AVIRIS-NG Data Portal网站下载:https://avirisng.jpl.nasa.gov/dataportal/

- 2014年~2020年的数据可以从
参考文献
AVIRIS-Classic门户,https://aviris.jpl.nasa.gov/index.html
AVIRIS-NG门户,https://aviris-ng.jpl.nasa.gov/index.html
- 本文作者: 闫钊
- 本文链接: https://whuhenry.github.io/2020/05/30/2020-05-30-introduction-to-aviris-dataset/
- 版权声明: 本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!
AVIRIS 简介的更多相关文章
- AVIRIS反射率数据简介
Surface Reflectance 高光谱图像 ↑ AVIRIS高光谱成像光谱仪采集得到的原始图像为辐亮度图像,经过校正后的L1级产品为地表辐亮度信息.但是许多时候,我们更希望知道地面目标物的反射 ...
- ASP.NET Core 1.1 简介
ASP.NET Core 1.1 于2016年11月16日发布.这个版本包括许多伟大的新功能以及许多错误修复和一般的增强.这个版本包含了多个新的中间件组件.针对Windows的WebListener服 ...
- MVVM模式和在WPF中的实现(一)MVVM模式简介
MVVM模式解析和在WPF中的实现(一) MVVM模式简介 系列目录: MVVM模式解析和在WPF中的实现(一)MVVM模式简介 MVVM模式解析和在WPF中的实现(二)数据绑定 MVVM模式解析和在 ...
- Cassandra简介
在前面的一篇文章<图形数据库Neo4J简介>中,我们介绍了一种非常流行的图形数据库Neo4J的使用方法.而在本文中,我们将对另外一种类型的NoSQL数据库——Cassandra进行简单地介 ...
- REST简介
一说到REST,我想大家的第一反应就是“啊,就是那种前后台通信方式.”但是在要求详细讲述它所提出的各个约束,以及如何开始搭建REST服务时,却很少有人能够清晰地说出它到底是什么,需要遵守什么样的准则. ...
- Microservice架构模式简介
在2014年,Sam Newman,Martin Fowler在ThoughtWorks的一位同事,出版了一本新书<Building Microservices>.该书描述了如何按照Mic ...
- const,static,extern 简介
const,static,extern 简介 一.const与宏的区别: const简介:之前常用的字符串常量,一般是抽成宏,但是苹果不推荐我们抽成宏,推荐我们使用const常量. 执行时刻:宏是预编 ...
- HTTPS简介
一.简单总结 1.HTTPS概念总结 HTTPS 就是对HTTP进行了TLS或SSL加密. 应用层的HTTP协议通过传输层的TCP协议来传输,HTTPS 在 HTTP和 TCP中间加了一层TLS/SS ...
- 【Machine Learning】机器学习及其基础概念简介
机器学习及其基础概念简介 作者:白宁超 2016年12月23日21:24:51 摘要:随着机器学习和深度学习的热潮,各种图书层出不穷.然而多数是基础理论知识介绍,缺乏实现的深入理解.本系列文章是作者结 ...
随机推荐
- 安卓commandlinetools-win-6200805_latest配置
JDK:1.8.0_251 系统:win10 64bit 问题1 官网下载commandlinetools,解压运行报错 解决方法 打开sdkmanager.bat,修改第17行为set DEFAUL ...
- Python库的安装与查看
安装库: Step1: win+r键打开此页面,并输入cmd Step2 :键入cmd并点击确定 Step3 :键入语句:“ pip install 库名 “ 回车即可 这样库就 ...
- 2019-2020Nowcoder Girl初赛 题解
题目都不是很难,就是最后一题有点毒瘤 第一题:牛妹爱整除 这个你把一个进制数进行拆分,拆分成若干位,然后在取模,这样会发现如果是x进制的数,那么对x+1这个进制转化即满足条件. 举个例子:一个x进制数 ...
- P2764 最小路径覆盖问题 网络流重温
P2764 最小路径覆盖问题 这个题目之前第一次做的时候感觉很难,现在好多了,主要是二分图定理不太记得了,二分图定理 知道这个之后就很好写了,首先我们对每一个点进行拆点,拆完点之后就是跑最大流,求出最 ...
- Directory类和DirectoryInfo类
1.Directory类 Directory类公开了用于创建.移动.枚举.删除目录和子目录的静态方法 2.DirectoryInfo类 DirectoryInfo和Directory类的区别可以参看F ...
- 五一以来,国产手机受到cmtwg, nkvhu, qhsz等几款恶意软件肆虐。
受影响手机包括魅族,中国移动等国产手机. 5月12日开始有人在百度知道提问cmtwg,5月13日mx吧也有人在发贴. 我接到有问题的手机时间更早,大约就是五一之后. 出现问题的几个牌子的国产手机,似乎 ...
- Jenkins页面操作提示 "No valid crumb was included in the request"
一.问题描述(Problem Description): 在jenkins中创建新任务时候选择"拷贝已存在任务",点击OK,跳转到下一步时候弹出如下错误信息:"No va ...
- 解决 Loaded plugins: fastestmirror
其大概意思是fastestmirror不能使用,fastestmirror是yum的一个加速插件,具体我也没有仔细了解过,可能是系统不支持或者缺少组建导致的.处理办法就是禁用这个插件,方法如下:roo ...
- 【雕爷学编程】Arduino动手做(54)---大按键点动模块
37款传感器与模块的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止37种的.鉴于本人手头积累了一些传感器和模块,依照实践(动手试试)出真知的理念,以学习和交流为目的,这里准备 ...
- python操作MySQL之pymysql模块
import pymysql#pip install pymysql db=pymysql.connect(','day040') cursor=db.cursor() #创建游标 book_list ...