第十八课 Gazebo仿真器
1.Gazebo概述
在Gazebo中的模拟效果是非常好的.
它的特性
Dynamics Simulation
直接控制物理引擎参数
Building Editor
无需代码即可在Gazebo中创建机器人模型(只用insert就可以插入各种模型,可以在基于Gazebo的云端中创建机器人模型)
Advanced 3DGraphics
提高真实性
Sensors
提供激光雷达,摄像头,RGBD摄像头,IMU等传感器
Robot Models
提供多种机器人模型,包括PR2,iRobot,Create,TurtleBot,机械臂,灵巧手等
Environments
提供多种模拟环境
Programmatic Interfaces
支持ROS,API接口.
Gazebo构架(由服务器和客户端组成)
服务器:其作用是执行物理循环,生成传感器数据
执行文件:gzserver
Libraries:Physics(物理环境模拟),Sensors(传感器),Rendering(用于渲染),Transport(传输数据)
客户端:其作用提供用户交互和可视化仿真
执行文件:gzclient
Libraries:Transport,Rendering,GUI
如何运行gazebo
有两种方式:
1.单独运行server和client
gzserver
gzclient
2.同时运行gazebo server和client
gazebo
如果从ros中启动,则使用
rosrun gazebo_ros gazebo
本版本的ros是indigo,gazebo的版本为2.2,它有一个故障问题,即找不到models,
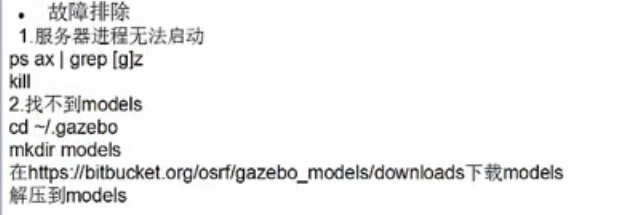
Ubuntu下显示隐藏文件,使用快捷键ctrl+h


下载完上面的文件之后,才可以运行Gazebo.
运行之前启动roscore,再运行rosrun gazebo_ros gazebo

从上面可以看出在world下面提供了Scene,Physics,Models(模拟各种模型,默认只有一个地平面),LIghts(模拟光线).
insert下面包含各种Models.

按住shift+z可以进行左右旋转
将上面内容保存 save world as,其格式为sdf
它默认的launch文件
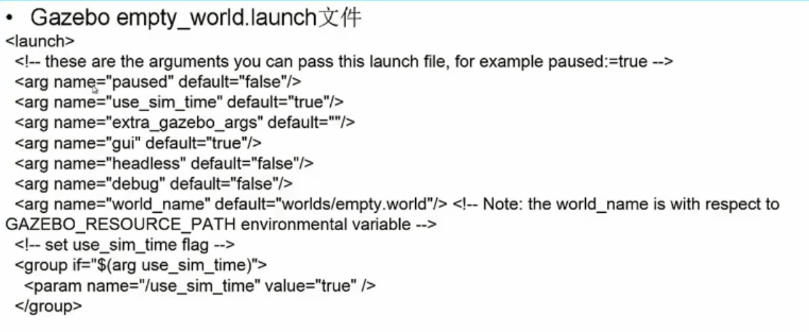
在上面的文件中paused表示以暂停模式运行
use_sim_time表示使用模拟时间
extra_gazebo_args表示表示外部的其他参数
gui表示窗口模式
world_name默认是worlds/empty.world,我们可以指定自己的文件比如之前保存的demo_world.sdf文件,在后面直接把launch文件里面empty_world继承一下,然后把下面的参数默认换成自己的demo_world.world来运行刚刚配置好的世界.

上面的3个参数是跟在gazebo_ros中的参数,第一个参数是否暂停运行,第二个参数为headless,第三个参数为是否详细运行.
下面的script_type,如果是debug就运行debug,否则运行gzserver.
最下面是client的参数,如果选择gui的话.
willowgarage_world.launch文件继承自empty_world.launch文件

刚开始直接包含了empty_world.launch文件,然后把参数换成willowgarage.wold文件.
下面的参数是跟empty_world.launch是一样的可以不用指定.

TurtleBot in gazebo

下面看一下turtlebot的urdf文件
xacro::macro是支持描述文件的一种格式,

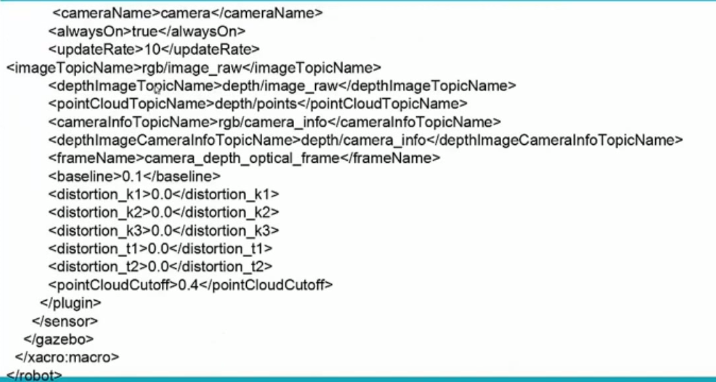
URDF(机器人描述的文件)的生成,

Turtlebot navigation

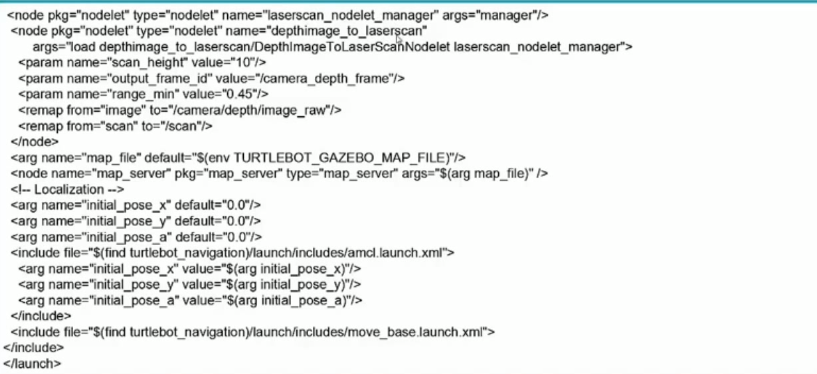
为了能够控制启动的机器人,把下面的一行加入文件turtlebot_gmapping.launch


如果不加就会出现如下错误

按照上面修改过后正确运行之后,再运行rviz
rosrun rviz rviz
然后再在rviz中添加如下内容

最后rviz中的显示结果如下:

看一下上面都发布了那些主题



它发布的主题跟move_base基本上是一致的.
它也有/move_base/goal这个主题,就是rviz上面的2d导航.
下面来启动一下turtlebot的gmapping
roslaunch turtlebot_navigation turtlebot_gmapping.launch ,同样需要按照上面的方式进行修改.
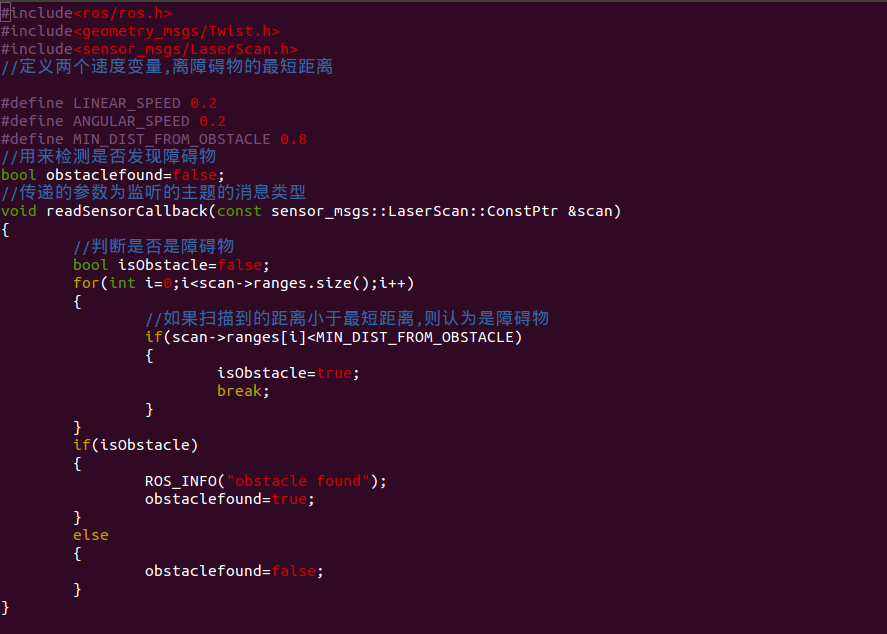
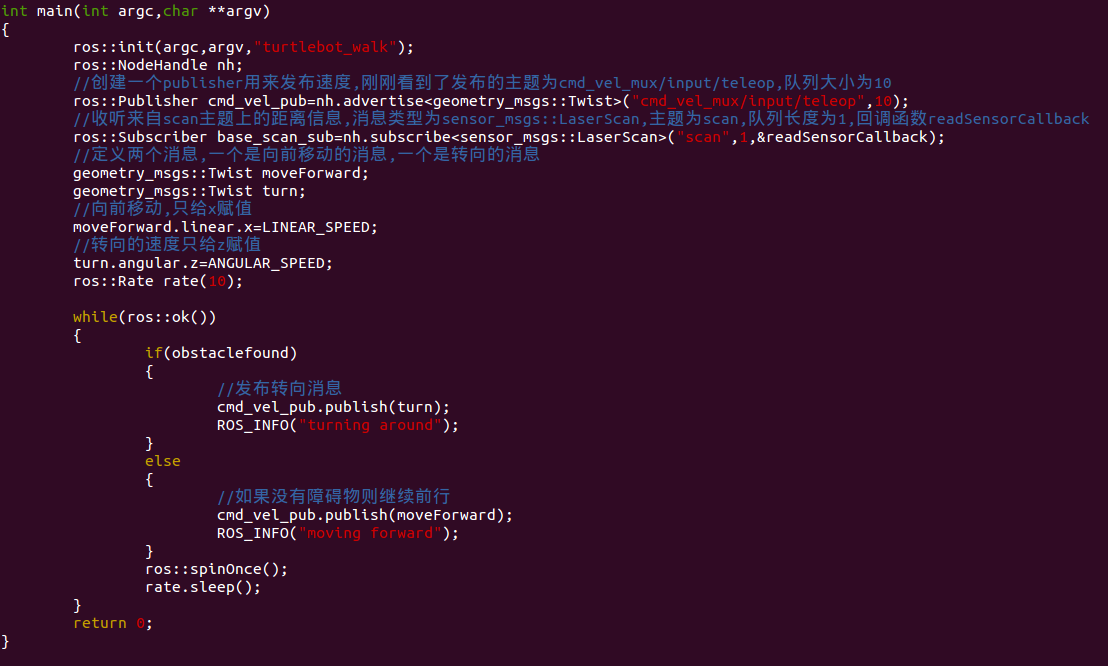
下面来写一个避障的程序,首先需要一个/scan主题,用它来发现离障碍物的距离.以及控制机器人运动的主题为
/cmd_vel_mux/input/teleop
在之前的包为turtlebot_navigation下的src下创建源文件turtlebot_walk.cpp
CMakeLists.txt
文件内容


package.xml

然后在launch文件的turtlebot_amcl.launch中加入下面内容,启动本程序的节点

下面运行一个turtlebot_amcl.launch文件
roslaunch turtlebot_navigation turtlebot_amcl.launch

关闭该节点.
第十八课 Gazebo仿真器的更多相关文章
- NeHe OpenGL教程 第四十八课:轨迹球
转自[翻译]NeHe OpenGL 教程 前言 声明,此 NeHe OpenGL教程系列文章由51博客yarin翻译(2010-08-19),本博客为转载并稍加整理与修改.对NeHe的OpenGL管线 ...
- NeHe OpenGL教程 第三十八课:资源文件
转自[翻译]NeHe OpenGL 教程 前言 声明,此 NeHe OpenGL教程系列文章由51博客yarin翻译(2010-08-19),本博客为转载并稍加整理与修改.对NeHe的OpenGL管线 ...
- NeHe OpenGL教程 第二十八课:贝塞尔曲面
转自[翻译]NeHe OpenGL 教程 前言 声明,此 NeHe OpenGL教程系列文章由51博客yarin翻译(2010-08-19),本博客为转载并稍加整理与修改.对NeHe的OpenGL管线 ...
- NeHe OpenGL教程 第十八课:二次几何体
转自[翻译]NeHe OpenGL 教程 前言 声明,此 NeHe OpenGL教程系列文章由51博客yarin翻译(2010-08-19),本博客为转载并稍加整理与修改.对NeHe的OpenGL管线 ...
- 深入浅出CChart 每日一课——第十八课 女神的套娃,玩转对话框
前面笨笨已经给大家展示了CChart编程的N个例子.这些例子中,我们的CChart图像都是绘制在程序的主窗口中的. 在很多情况下,我们面对的情形不是这样的.这节课笨笨就给大家介绍一下怎样在对话框中用C ...
- 斯坦福第十八课:应用实例:图片文字识别(Application Example: Photo OCR)
18.1 问题描述和流程图 18.2 滑动窗口 18.3 获取大量数据和人工数据 18.4 上限分析:哪部分管道的接下去做 18.1 问题描述和流程图
- Asp.Net Web API 2第十八课——Working with Entity Relations in OData
前言 阅读本文之前,您也可以到Asp.Net Web API 2 系列导航进行查看 http://www.cnblogs.com/aehyok/p/3446289.html. 本文的示例代码的下载地址 ...
- 第二十八课:focusin与focusout,submit,oninput事件的修复
focusin与focusout 这两个事件是IE的私有实现,能冒泡,它代表获得焦点或失去焦点的事件.现在只有Firefox不支持focusin,focusout事件.其实另外两个事件focus和bl ...
- 第十八课:js样式操作需要注意的问题
样式分为,外部样式(<link />),内部样式(<style></style>),行内样式(style:).再加上一个important对选择器权重的干扰. 大体 ...
随机推荐
- 关于 webpack-dev-server 热更新出现重复的问题
关于 webpack-dev-server 热更新出现重复的问题 webpack-dev-server 在前端开发时很方便,可以热更新,只需要配置 webpack.config.js 即可. 但是昨天 ...
- sublime文件对比插件--sublimerge
网上很多文件对比的基本都要收费,所以还是干脆看看sublime有没插件算了. 结果还是有一个:sublimerge 1 先安装该插件: 2 然后在sublime下都打开要对比的两个文件: 3 然后在其 ...
- 无法建立目录wp-content/uploads/xxxx/xx。有没有上级目录的写权限?解决办法
首先小七已经搭建了n个wordpress网站之前没遇到过这坑爹的问题,有一天很奇怪无论是本地搭建的wp还是线上搭建的wp网站都出现了同样的问题 本地: 报错原因就是文件权限问题,所以首先就是更改wp- ...
- ASP.NET WebApi通过自定义ControllerSelector来自定义Controller的选择
在web api中,我们可以通过给Cotroller类添加RoutePrefixAttribute来定义url与Controller之间的映射,但是有时候有一些特殊情况下,我们需要做一些特殊处理来将某 ...
- css3动画学习笔记
具体学习地址:http://www.imooc.com/learn/33CSS3中的三种动画:tranform形变动画/transition缓动动画/animation逐帧动画; tranform: ...
- nodejs 中的 NODE_PATH
在使用 nodejs 开发中我们都免不了要去安装一些第三方模块. 那么你或多或少的遇到过以下一些问题 再继续阅读之前,我们先来弄清楚一个概念. npm install --global xxx 属于全 ...
- java代码=========这个代码还是有问题的。不能实现功能呀
有问题的代码: package com.a.b; import javax.swing.*; import java.awt.Color; import java.awt.event.*; impor ...
- jsp数据显示分页
从数据库获得数据就不写了,直接写如何进行分页,为了方便,把方法和实体类都写到一个java文件里面了 这只是一种简单的分页方法,肯能会有比较多的bug 这是java里的构造实体类和方法, public ...
- 子查询语句的thinkphp实现
语句 SELECT a.id as item_id,a.name as item_name,a.intro as item_intro,b.id,b.money FROM sh_incentive_i ...
- js作用域和作用域链
作用域 首先要知道一点,js跟python都是一样的,先编译后执行 唯一的区别在于,js对于只声明,未定义的变量,报错是未定义,后面代码会有这个例子 编译的过程只有赋值和开辟空间的过程 只有函数,类才 ...