Velodyne 线性激光雷达数据合成
如果想用字母表示角度,有两个方法:
1. 用三角函数sind(θ4)、cosd(θ4)、tand(θ4)、atand(θ4)进行表示,注意:θ4在输入时是角度,只是没有度数特有的符号(°)而已。
2. 用deg2rad将角度转换为弧度。45度就是45/180*pi,60度就是60/180*pi。pi=3.1415。
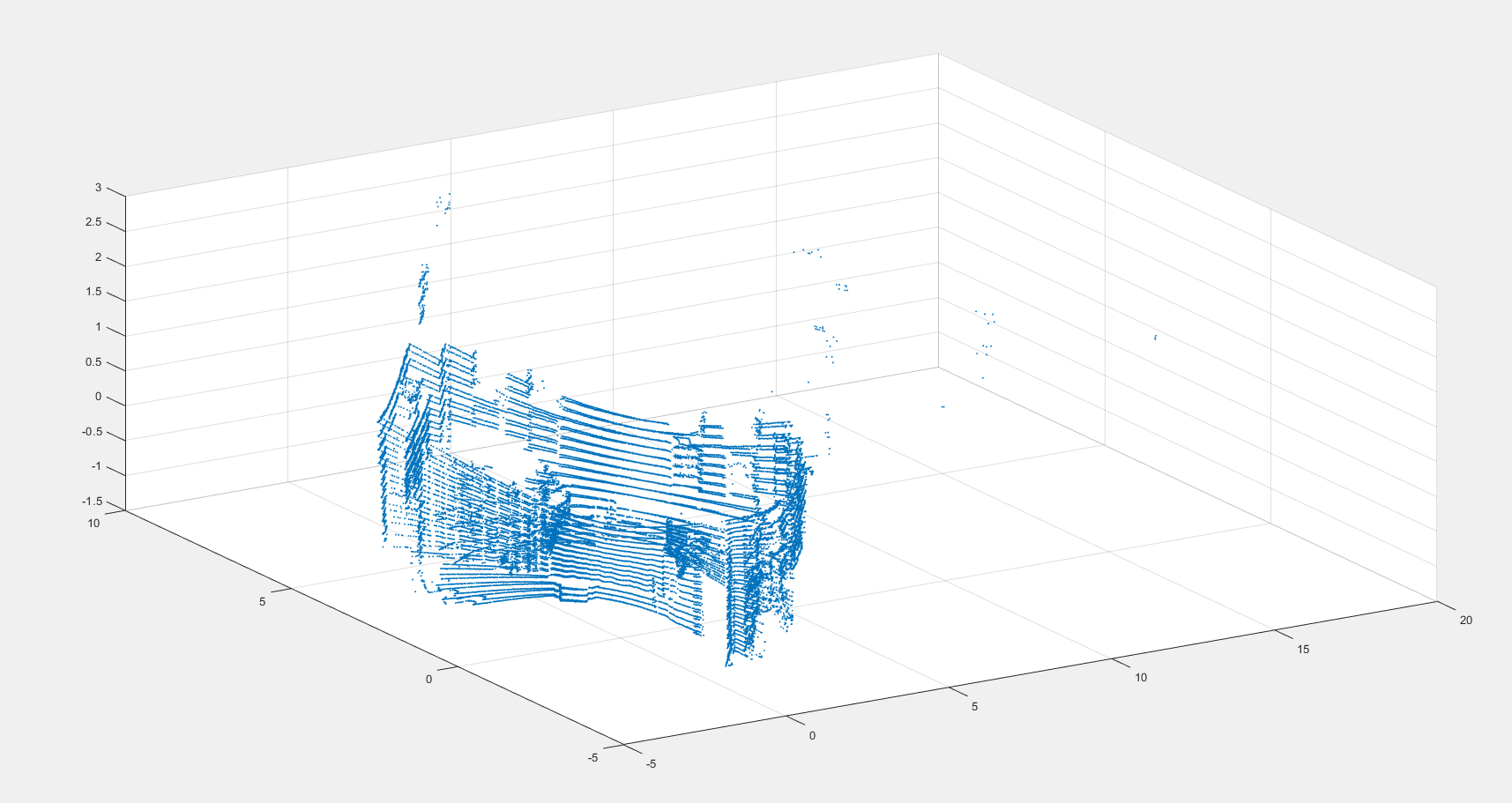
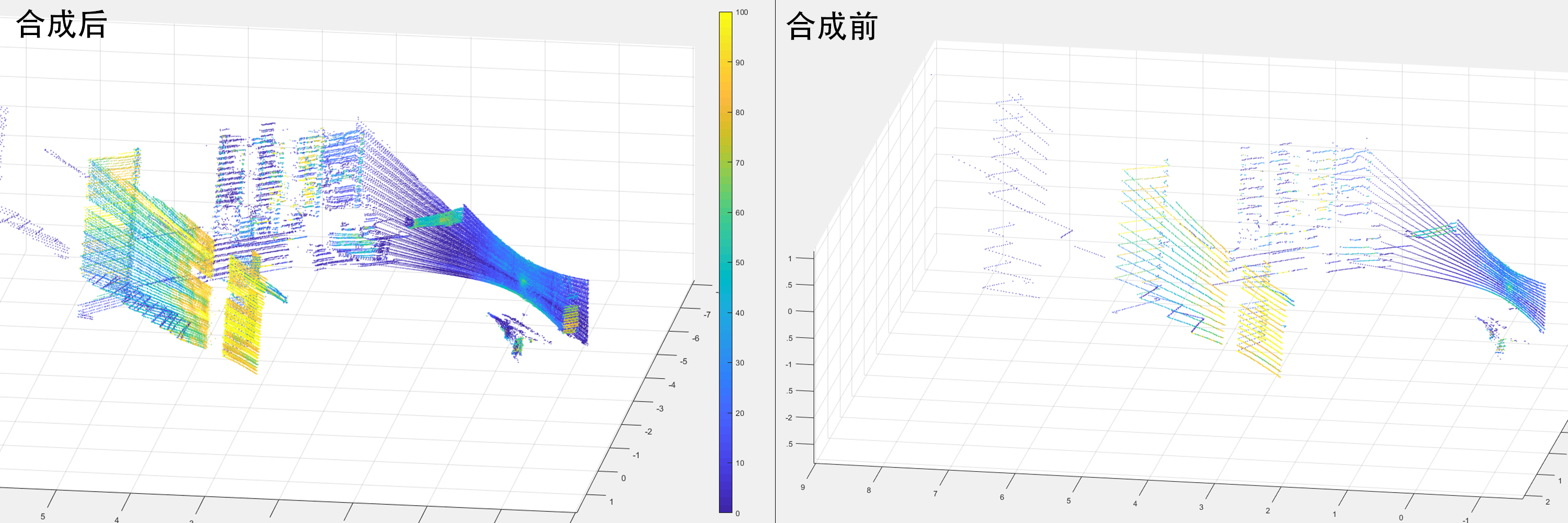
clear m = csvread('zero_1.csv', 2, 0); n = csvread('one_1.csv', 2, 0); for i=1:1:3 m1(:,i)=m(:,i); n1(:,i)=n(:,i); end k=36/180*pi; k1=1/180*pi; trans=[cos(k) sin(k) 0;-sin(k) cos(k) 0;0 0 1]; trans1=[01 0 0;0 cos(k1) sin(k1);0 -sin(k1) cos(k1)]; trans2=[cos(-k) sin(-k) 0;-sin(-k) cos(-k) 0;0 0 1]; tmp=(trans2*trans1*trans*n1')'; tmp=[tmp;m1]; scatter3(tmp(:,1),tmp(:,2),tmp(:,3),1) %scatter3(m(:,1),m(:,2),m(:,3),1) %scatter3(n(:,1),n(:,2),n(:,3),1)
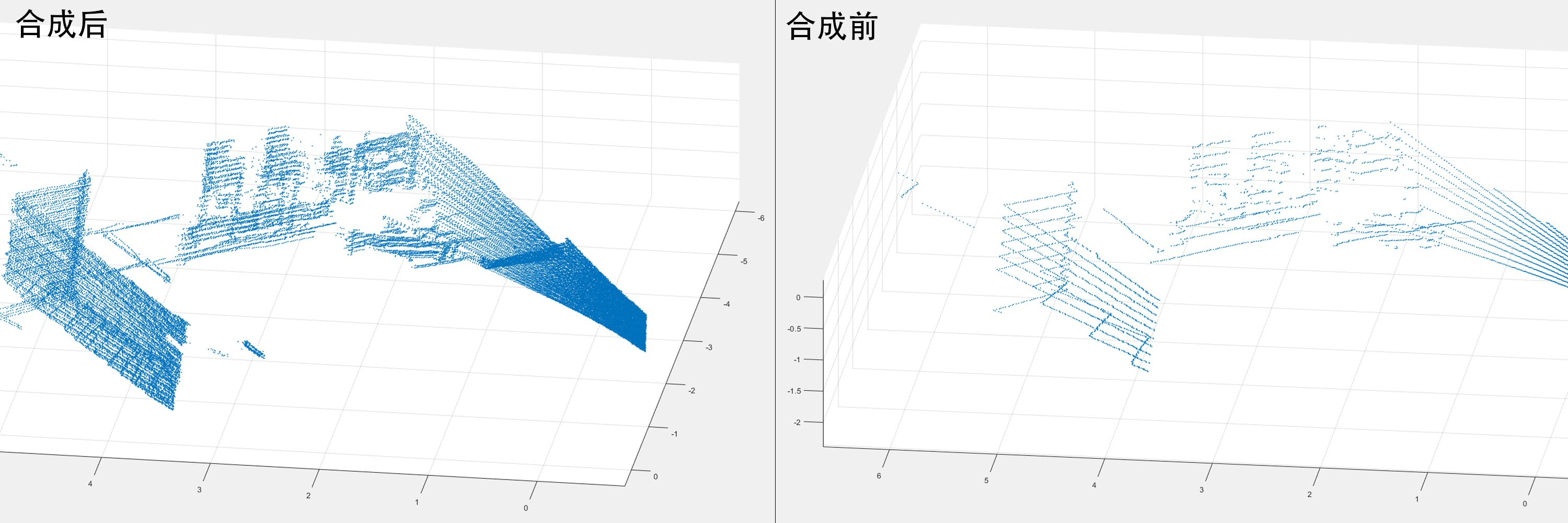
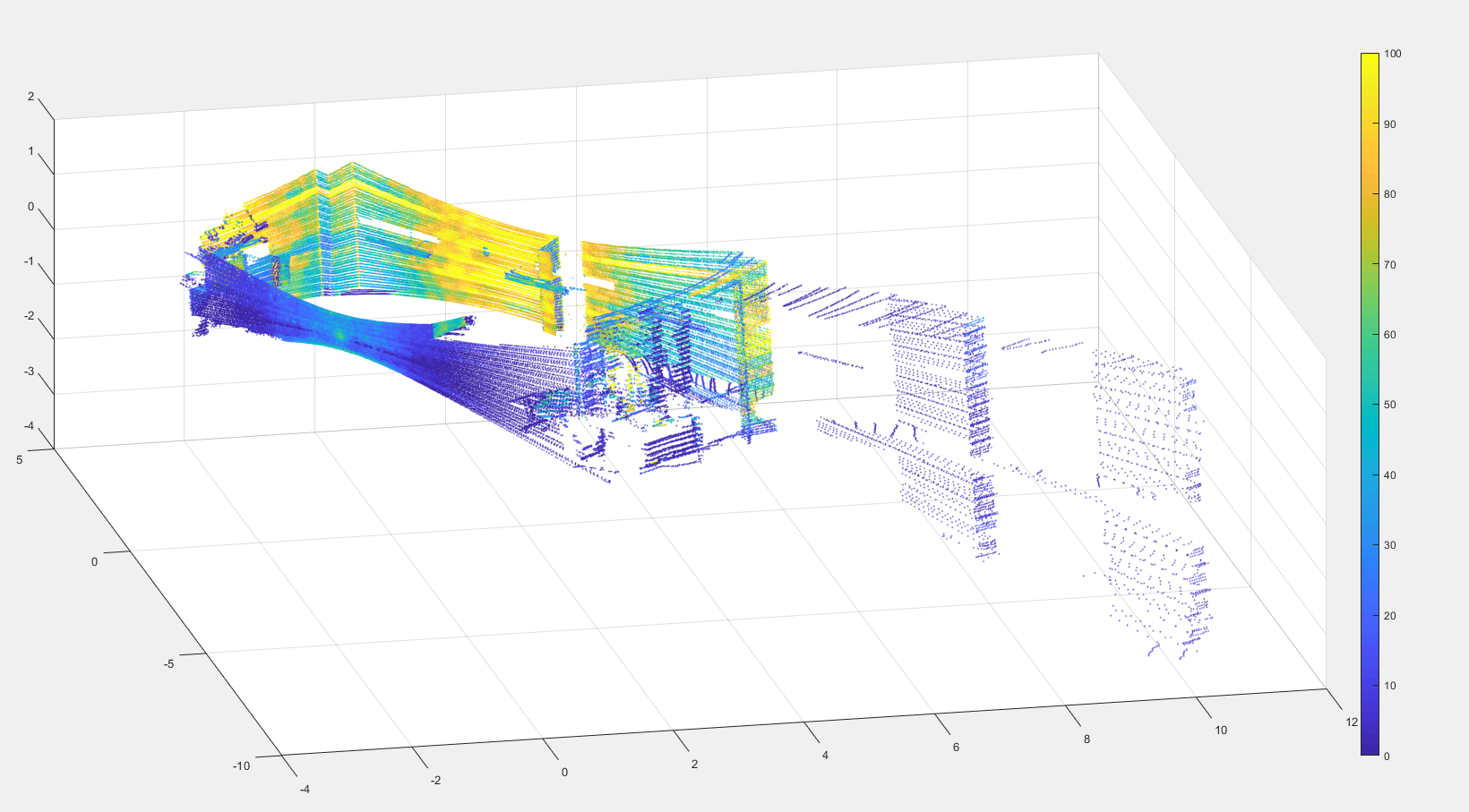
2019-03-23八向数据合成
clear
a{10} = csvread('0 0.csv', 2, 0);
a{1} = csvread('-1 0.csv', 2, 0);
a{2} = csvread('1 0.csv', 2, 0);
a{3} = csvread('0 -1.csv', 2, 0);
a{4} = csvread('0 1.csv', 2, 0);
a{5} = csvread('-0.7 0.7.csv', 2, 0);
a{6} = csvread('0.7 -0.7.csv', 2, 0);
a{7} = csvread('-0.7 -0.7.csv', 2, 0);
a{8} = csvread('0.7 0.7.csv', 2, 0);
for i=1:1:3
b{1}(:,i)=a{1}(:,i);
b{2}(:,i)=a{2}(:,i);
b{3}(:,i)=a{3}(:,i);
b{4}(:,i)=a{4}(:,i);
b{5}(:,i)=a{5}(:,i);
b{6}(:,i)=a{6}(:,i);
b{7}(:,i)=a{7}(:,i);
b{8}(:,i)=a{8}(:,i);
b{10}(:,i)=a{10}(:,i);
end
ans=[trans(b{1},-1,0,0);trans(b{2},1,0,0);trans(b{3},0,1,0);trans(b{4},0,-1,0);trans(b{8},0.7,0.7,0);b{10};];
% trans(b{6},-0.7,0.7,0);
% trans(b{1},-1,0,0);trans(b{2},1,0,0);trans(b{3},0,1,0);trans(b{4},0,-1,0);
scatter3(ans(:,1),ans(:,2),ans(:,3),1)
function x=trans(m,x,y,z) k=36/180*pi; trans1=[cos(k) sin(k) 0;-sin(k) cos(k) 0;0 0 1]; trans2=[cos(-k) sin(-k) 0;-sin(-k) cos(-k) 0;0 0 1]; x=x/180*pi; y=y/180*pi; z=z/180*pi; transy=[cos(y) 0 -sin(y);0 1 0;sin(y) 0 cos(y)]; transz=[cos(z) sin(z) 0;-sin(z) cos(z) 0;0 0 1]; transx=[1 0 0;0 cos(x) sin(x);0 -sin(x) cos(x)]; x=(trans2*transy*transx*transz*trans1*m')'; % x=(transy*transx*transz*m')';
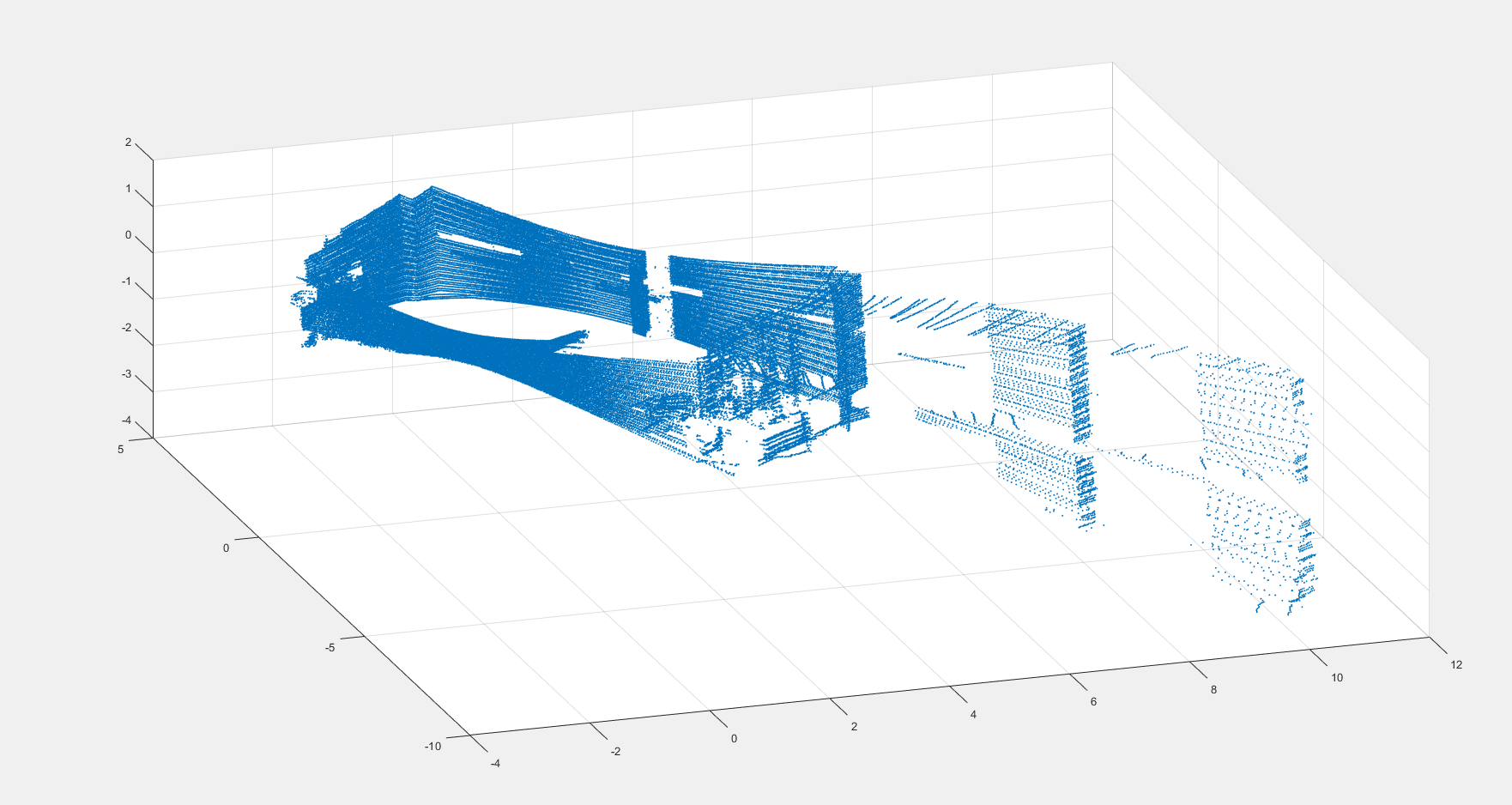
2019-03-23 着色演示与csv写入
clear
a{10} = csvread('0 0.csv', 2, 0);
a{1} = csvread('-1 0.csv', 2, 0);
a{2} = csvread('1 0.csv', 2, 0);
a{3} = csvread('0 -1.csv', 2, 0);
a{4} = csvread('0 1.csv', 2, 0);
a{5} = csvread('-0.7 0.7.csv', 2, 0);
a{6} = csvread('0.7 -0.7.csv', 2, 0);
a{7} = csvread('-0.7 -0.7.csv', 2, 0);
a{8} = csvread('0.7 0.7.csv', 2, 0);
for i=1:1:3
b{1}(:,i)=a{1}(:,i);
b{2}(:,i)=a{2}(:,i);
b{3}(:,i)=a{3}(:,i);
b{4}(:,i)=a{4}(:,i);
b{5}(:,i)=a{5}(:,i);
b{6}(:,i)=a{6}(:,i);
b{7}(:,i)=a{7}(:,i);
b{8}(:,i)=a{8}(:,i);
b{10}(:,i)=a{10}(:,i);
end
b{1}=trans(b{1},-1,0,0);
b{2}=trans(b{2},1,0,0);
b{3}=trans(b{3},0,1,0);
b{4}=trans(b{4},0,-1,0);
b{8}=trans(b{8},0.7,0.7,0);
for i=1:1:3
a{1}(:,i)=b{1}(:,i);
a{2}(:,i)=b{2}(:,i);
a{3}(:,i)=b{3}(:,i);
a{4}(:,i)=b{4}(:,i);
a{5}(:,i)=b{5}(:,i);
a{6}(:,i)=b{6}(:,i);
a{7}(:,i)=b{7}(:,i);
a{8}(:,i)=b{8}(:,i);
end
ans0=[a{1};a{2};a{3};a{4};a{8};a{10};];
% csvwrite('tst.csv',ans0);
scatter3(ans0(:,1),ans0(:,2),ans0(:,3),1,ans0(:,4),'.');
%x,y,z,粗细,强度,形状(默认是圈)
caxis([0,100]);
%强度的取值范围
colorbar; %在右侧显示颜色条
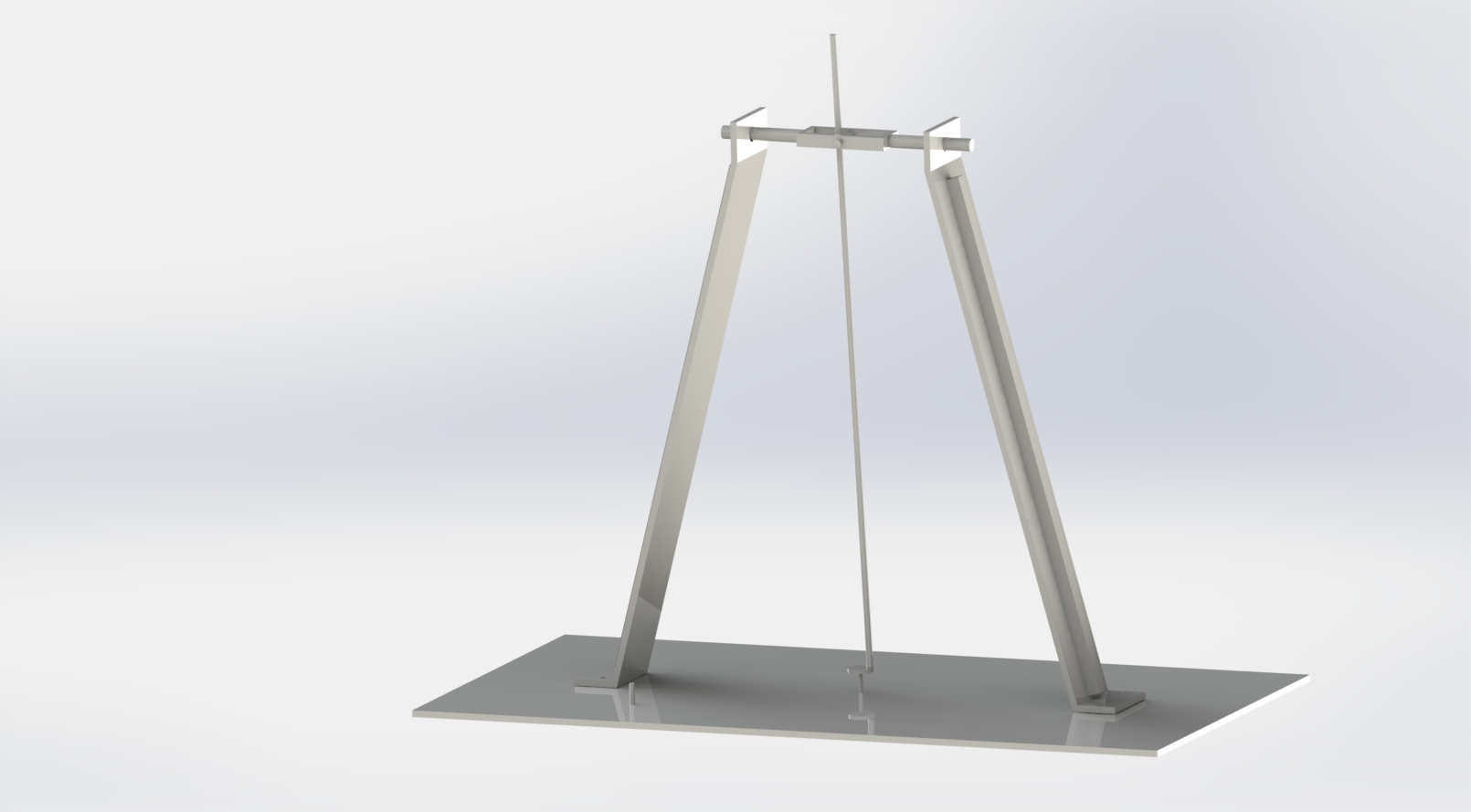
2019-03-24 支架构建
Velodyne 线性激光雷达数据合成的更多相关文章
- Velodyne线性激光雷达pcap文件格式及写入、数据解析 Lebal:激光雷达
转载自https://blog.csdn.net/qq_25241325/article/details/80766305 roslaunch loam_velodyne loam_velodyne. ...
- Velodyne VLP-16激光雷达数据分析
Velodyne VLP-16激光雷达数据分析 Velodyne VLP-16激光雷达保持了 Velodyne 在 LiDAR 中的突破性重要功能:实时收发数据.360 度全覆盖.3D 距离测量以及校 ...
- jQuery的deferred对象使用详解——实现ajax线性请求数据
最近遇到一个ajax请求数据的问题 ,就是想要请求3个不同的接口,然后请求完毕后对数据进行操作,主要问题就是不知道这3个请求誰先返回来,或者是在进行操作的时候不能保证数据都已经回来,首先想到能完成的就 ...
- I.MX6 Linux mipi配置数据合成
/*************************************************************************** * I.MX6 Linux mipi配置数据合 ...
- Matlab生成二类线性可分数据
%% 生成二类线性可分数据 function [feature, category]=generate_sample(step,error) aa=3; %斜率 bb=3; %截距 b1=1; rr ...
- 激光雷达数据到云cloud
激光雷达数据到云cloud 在美国地质调查局的3D提升计划(3DEP)被激发到一个新的方式可用性宣布从3DEP仓库的访问和处理激光雷达点云数据. 3DEP一直在美国使用光检测和测距(激光)技术获取三维 ...
- jsoncpp用法通俗易懂之将数据合成json格式
void *upload(void *pParam) { CUpSender *s = (CUpSender*)pParam; map<string, string> mx; char t ...
- oracle 将多字段数据合成一个
1.系统默认 WMSYS.WM_CONCAT(A.ID), 2.再进行替换 REPLACE(WMSYS.WM_CONCAT(A.ID),',','|'), (张)
- node 把base数据合成图片
var cr = new Buffer(img_Datas, 'base64'); var img = params.img_path + '/' + picDevNo + '_' + params. ...
随机推荐
- scala学习手记11 - 类定义
这里会通过与Java比较的方式来说明scala是如何创建类的. 先来看一下Java中是如何定义一个类的: public class Car { private final int year; priv ...
- android传感器使用
android传感器的使用以加速度传感器.方向传感器.磁场.压力.温度.光感.特别的距离传感器为例介绍. 首先所在的类需要implement SensorEventListener.使用传感器分为以下 ...
- .net操作Oracle数据库步骤及方法
1.首先安装PL/SQL Developer Oracle客户端软件 2.安装Oracle Instant Client(即时客户端) 安装与配置 配置环境变量ORAClE HOME 地址为insta ...
- telnet: connect to address ::1: connect refused [centos, linux]
在我测试邮件服务器时, 使用 telnet localhost 25 出现如下的提示: Trying::1... telnet: connect to address ::1:Connection r ...
- C#学习历程(一)[基础概念]
#小摘要 >> boolean和bool差不多是一个东西,但是bool是一个基本值的类型,boolean则是对象(java与javascript中有用). Bool是Boolean的别名. ...
- Huffman编码实现文件的压缩与解压缩。
以前没事的时候写的,c++写的,原理很简单,代码如下: #include <cstdio> #include <cstdlib> #include <iostream&g ...
- Context的作用
context用于访问全局资源 protected void onCreate(Bundle savedInstanceState) { super.onCreate(savedInstanceSta ...
- 版本工具管理之----git
如何查看隐藏文件夹: 如果你看不到.git目录,你需要让隐藏的文件可见.具体做法就是打开一个Terminal窗口,输入以下命令: defaults write com.apple.finder App ...
- react: menuService
1.获取菜单对象 static findCurrentItem(items, currentState, currentItem) { _.forEach(items, function (item) ...
- Python爬虫----抓取豆瓣电影Top250
有了上次利用python爬虫抓取糗事百科的经验,这次自己动手写了个爬虫抓取豆瓣电影Top250的简要信息. 1.观察url 首先观察一下网址的结构 http://movie.douban.com/to ...