ROS和OpenCV的对接cv_bridge
做一个诚实的ROS教程搬运工.............................
官网链接:http://wiki.ros.org/cv_bridge
一、Package Summary
Released Continuous
integration Documented
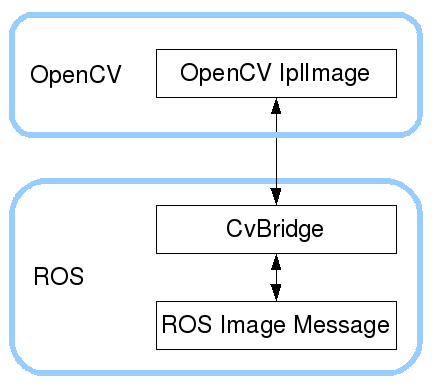
This contains CvBridge, which converts between ROS Image messages and OpenCV images.
- Maintainer status: maintained
- Maintainer: Vincent Rabaud <vincent.rabaud AT gmail DOT com>
- Author: Patrick Mihelich, James Bowman
- License: BSD
- Bug / feature tracker: https://github.com/ros-perception/vision_opencv/issues
- Source: git https://github.com/ros-perception/vision_opencv.git (branch: indigo)
To learn how to interface OpenCV with ROS using CvBridge, please see thetutorials page.
ROS和OpenCV的对接cv_bridge的更多相关文章
- Ros Kinetic 配置 OpenCV2和CV_bridge (Python, C++)
本篇介绍如何在Ros-kinetic环境下运用opencv2进行开发的配置,系统平台为64位Ubuntu16.04. 需要系统环境: 1.Ros kinetic版本,一般自带cv_bridge, 若没 ...
- 关于ros将opencv版本固定“写死”的一些想法
今天主要工作是将ros和zed结合起来,但是发现自己安装了opencv3.1,ros indigo安装的是opencv2.4.8,这就麻烦了,zed支持的是opencv3.1.一开始使用slam2时, ...
- [实例]ROS使用OpenCV读取图像并发布图像消息在rviz中显示
思路: (1)使用opencv读取本地图像 (2)调用cv_bridge::CvImage().toImageMsg()将本地图像发送给rviz显示 一.使用opencv读取本地图像并发布图像消息 ( ...
- 相机标定 matlab opencv ROS三种方法标定步骤(3)
三 , ROS 环境下 如何进行相机标定 刚开始做到的时候遇到一些问题没有记录下来,现在回头写的时候都是没有错误的结果了,首先使用ROS标定相机, 要知道如何查看节点之间的流程图 rosrun r ...
- 在ROS中使用OpenCV
1.在工作空间下创建程序包 $ cd ~/catkin_ws/src$ catkin_create_pkg robot_vision roscpp std_msgs cv_bridge image_t ...
- ROS关于cv_brige的使用
最近想使用OpenCV 和ROS实现点云的拼接,实现三维重建,那么在学习了kinect的基本的使用方法以后我们知道,直接使用ROS 的包即可得到点云,深度图,rgb图等信息, roslaunch op ...
- ROS学习笔记(三)
机器人建模与仿真URDF(Unified Robot Descrption Format,统一机器人描述格式),ROS提供了URDF的c++解析器.安装语法检查工具sudo apt-get insta ...
- [ROS] Studying Guidance
Reference: https://www.zhihu.com/question/35788789 安装指南:http://wiki.ros.org/indigo/Installation/Ubun ...
- 运行ORB-SLAM笔记_使用篇(二)
1. 编译完成之后就可以使用了,按照说明我们可以知道,首先开启roscore
随机推荐
- TortoiseGit配置密钥的方法
TortoiseGit 使用扩展名为ppk的密钥,而不是ssh-keygen生成的rsa密钥.使用命令ssh-keygen -C "邮箱地址" -t rsa产生的密钥在Tortoi ...
- 【POJ 1981】Circle and Points(已知圆上两点求圆心坐标)
[题目链接]:http://poj.org/problem?id=1981 [题意] 给你n个点(n<=300); 然后给你一个半径R: 让你在平面上找一个半径为R的圆; 这里R=1 使得这个圆 ...
- 2017 ACM-ICPC 亚洲区(西安赛区)网络赛 G. Xor
There is a tree with nn nodes. For each node, there is an integer value a_iai, (1 \le a_i \le 1,0 ...
- 创建序列化器,序列化管理器,closureSerializer
创建序列化器,序列化管理器,closureSerializer //通过反射创建序列化对象 // Create an instance of the class with the given name ...
- noip模拟赛 括号序列
题目描述LYK有一个括号序列,但这个序列不一定合法.一个合法的括号序列如下:()是合法的括号序列.若A是合法的括号序列,则(A)是合法的括号序列.若A和B分别是合法的括号序列,则AB是合法的括号序列. ...
- hdu_1863_畅通工程_201403122000
畅通工程 Time Limit: 1000/1000 MS (Java/Others) Memory Limit: 32768/32768 K (Java/Others)Total Submis ...
- linux下华为HSPA模块MU609的驱动问题
环境: CPU: s3c2416 Linux: 3.6 模块: HUAWEI MU609 SIM卡: 移动3G卡.移动4G卡 首先,拿到MU609模块后,第一要做的是对模块进行一些熟悉与了解,那么资料 ...
- React-Router 中文简明教程(上)
概述 说起 前端路由,如果你用过前端 MV* 框架构建 SPA 应用(单页面应用),对此一定不陌生. 传统开发中的 路由,是由服务端根据不同的用户请求地址 URL,返回不同内容的页面,而前端路由则将这 ...
- Yslow on Nodejs server
1. 目的:用yslow测试某个页面的性能 2. 需求:返回yslow测试后的数据,显示在页面 方法一. nodejs 需要把网址打包为har格式... 方法二. phantomjs 步骤: 1. 安 ...
- 73. 解决ExtJS TreePanel 的 iconCls设置问题
转自:https://blog.csdn.net/hanchuang213/article/details/62881568 很久没有写代码了,最近在做一个在线帮助网站,于是又捡起了 ExtJS,我用 ...