[PCL]1 PCL点云库安装
1.安装文件下载:官网,我还是比较喜欢别人编译好的安装包啊,哈哈。
http://www.pointclouds.org/downloads/windows.html
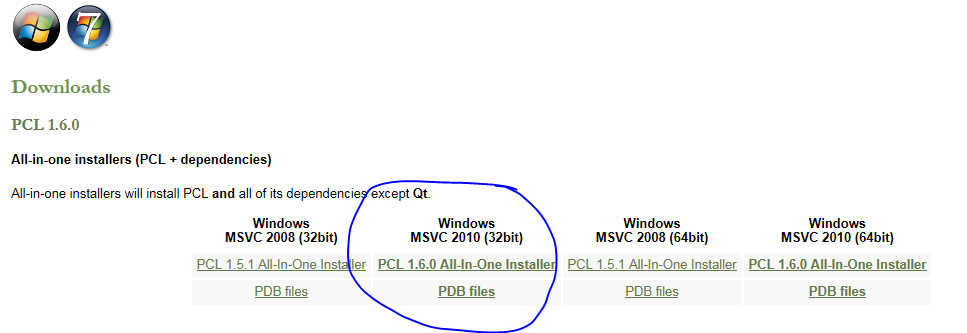
2.傻瓜式安装(下面的依赖项都集成进来了)
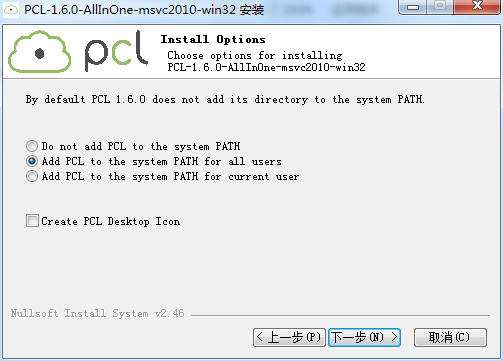 写入环境变量,这个很不错,可选。
写入环境变量,这个很不错,可选。
中间安装了Boost、VTK、Kinect驱动什么的。反正是一路下一步,当然我的机器是Win7系统,之前没有安装过PCL,比较纯净。
之后又单独安装了QT4.8.2的sdk。
3.测试
在安装目录下有share/doc/pcl-1.6/tutorials/sources/pcd_write事例程序,用CMake3.3.2生成VS2010项目文件。
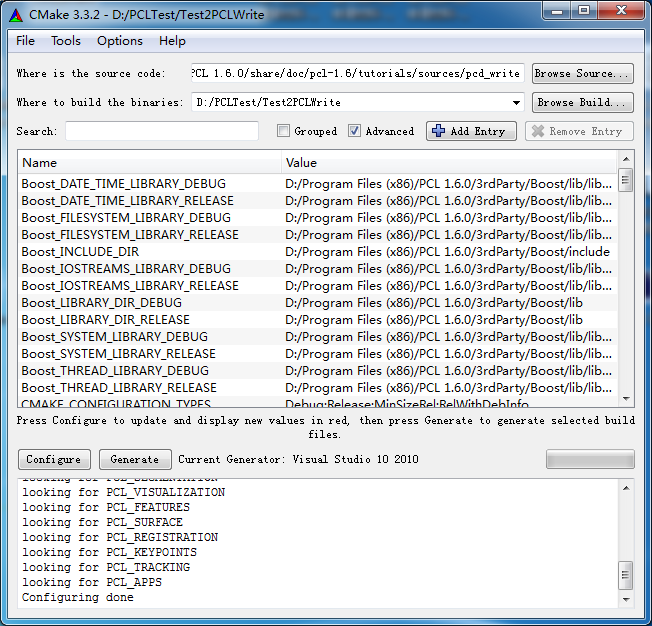
编译运行生成了一个.pcd格式文件。
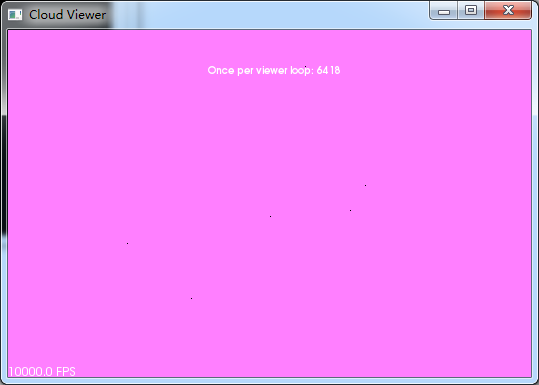
同样编译下面的程序:D:\Program Files (x86)\PCL 1.6.0\share\doc\pcl-1.6\tutorials\sources\cloud_viewer
这个项目引用了QT4.8.2的sdk的类库。查看刚才生成的.pcd文件,结果如图,大概有几个小点点:
pcd格式文件的基本内容如下:
# .PCD v0.7 - Point Cloud Data file format
VERSION 0.7
FIELDS x y z
SIZE 4 4 4
TYPE F F F
COUNT 1 1 1
WIDTH 5
HEIGHT 1
VIEWPOINT 0 0 0 1 0 0 0
POINTS 5
DATA ascii
1.28125 577.09375 197.9375
828.125 599.03125 491.375
358.6875 917.4375 842.5625
764.5 178.28125 879.53125
727.53125 525.84375 311.28125
附加依赖项:debug
D:\Program Files\PCL\lib\pcl_segmentation_debug.lib
D:\Program Files\PCL\lib\pcl_visualization_debug.lib
D:\Program Files\PCL\lib\pcl_features_debug.lib
D:\Program Files\PCL\lib\pcl_filters_debug.lib
D:\Program Files\PCL\lib\pcl_search_debug.lib
D:\Program Files\PCL\lib\pcl_octree_debug.lib
D:\Program Files\PCL\lib\pcl_sample_consensus_debug.lib
D:\Program Files\PCL\lib\pcl_ml_debug.lib
D:\Program Files\PCL\lib\pcl_kdtree_debug.lib
D:\Program Files\PCL\lib\pcl_io_debug.lib
D:\Program Files\PCL\lib\pcl_common_debug.lib
D:\Program Files\PCL\lib\pcl_io_ply_debug.lib
D:\Program Files\PCL\lib\pcl_surface_debug.lib
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_system-vc100-mt-gd-1_49.lib
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_filesystem-vc100-mt-gd-1_49.lib
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_thread-vc100-mt-gd-1_49.lib
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_date_time-vc100-mt-gd-1_49.lib
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_iostreams-vc100-mt-gd-1_49.lib
release
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_system-vc100-mt-1_49.lib
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_filesystem-vc100-mt-1_49.lib
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_thread-vc100-mt-1_49.lib
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_date_time-vc100-mt-1_49.lib
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_iostreams-vc100-mt-1_49.lib
D:\Program Files\PCL\lib\pcl_io_release.lib
D:\Program Files\PCL\lib\pcl_segmentation_release.lib
D:\Program Files\PCL\lib\pcl_io_ply_release.lib
D:\Program Files\PCL\lib\pcl_ml_release.lib
D:\Program Files\PCL\lib\pcl_features_release.lib
D:\Program Files\PCL\lib\pcl_filters_release.lib
D:\Program Files\PCL\lib\pcl_search_release.lib
D:\Program Files\PCL\lib\pcl_sample_consensus_release.lib
D:\Program Files\PCL\lib\pcl_octree_release.lib
D:\Program Files\PCL\lib\pcl_kdtree_release.lib
D:\Program Files\PCL\lib\pcl_common_release.lib
D:\Program Files\PCL\lib\pcl_surface_release.lib
学习目标:点云的匹配。
[PCL]1 PCL点云库安装的更多相关文章
- Windows下安装PCL点云库
原文链接:http://blog.csdn.net/u012337034/article/details/38270109 简介: 在Windows下安装PCL点云库的方法大概有两种: ...
- PCL 库安装
参考资料: http://www.cnblogs.com/newpanderking/articles/4022322.html VS2010+PCL配置 PCL共有两种安装方式 安全安装版,个人配置 ...
- PCL点云库:对点云进行变换(Using a matrix to transform a point cloud)
点云数据可以用ASCII码的形式存储在PCD文件中(关于该格式的描述可以参考链接:The PCD (Point Cloud Data) file format).为了生成三维点云数据,在excel中用 ...
- 点云库PCL学习
1. 点云的提取 点云的获取:RGBD获取 点云的获取:图像匹配获取(通过摄影测量提取点云数据) 点云的获取:三维激光扫描仪 2. PCL简介 PCL是Point Cloud Library的简称,是 ...
- Windows 8 64位系统 在VS2010 32位软件上 搭建 PCL点云库 开发环境
Windows 8 64位系统 在VS2010 32位软件上 搭建 PCL点云库 开发环境 下载PCL For windows 软件包 到这个网站下载PCL-All-In-One Installer: ...
- 配置点云库PCL时遇到的问题
配置PCL基本参照PCL中国官网教程 http://www.pclcn.org/study/shownews.php?lang=cn&id=34 配置点云库时遇到的问题(基于win8 64位, ...
- PCL点云库:ICP算法
ICP(Iterative Closest Point迭代最近点)算法是一种点集对点集配准方法.在VTK.PCL.MRPT.MeshLab等C++库或软件中都有实现,可以参见维基百科中的ICP Alg ...
- PCL点云库中的坐标系(CoordinateSystem)
博客转载自:https://blog.csdn.net/qq_33624918/article/details/80488590 引言 世上本没有坐标系,用的人多了,便定义了坐标系统用来定位.地理坐标 ...
- ViCANdo新版本发布(PART1) | 点云库(PCL)集成
激光雷达 随着智能驾驶技术的发展,激光雷达迅速的进入工程师的视野,不管是机械式.MEMS还是纯固态激光雷达,本质上都是以一定的速度扫描照射区域,在此过程中激光雷达不断的发出激光并接收反 ...
随机推荐
- 2016.04.28,英语,《Vocabulary Builder》Unit 20
nom, comes from the Latin word for 'name'. nominee is 'named', [ˌnɑːmɪ'niː] n. 被提名的人, 名义人. binomial ...
- [ZZ] Deferred Rendering and HDR
http://www.gamedev.net/topic/496785-deferred-rendering-and-hdr/ Quote: Original post by jstrohYeah I ...
- jQuery 两种方法实现IE10以下浏览器的placeholder效果
/* ** jQuery版本:jQuery-1.8.3.min.js ** 测试的浏览器:IE8,IETester下的IE6-IE9** Author:博客园小dee */ placeholder是H ...
- Xamarin迁移到 Unified API 注意事项
参考官方文档: Migrating to Unified API for Components #if __UNIFIED__ ... // Mappings Unified CoreGraphic ...
- Bigtable: A Distributed Storage System for Structured Data
https://static.googleusercontent.com/media/research.google.com/en//archive/bigtable-osdi06.pdf Abstr ...
- 4 bytes (32 bits) or 8 bytes (64 bits)
Computer Systems A Programmer's Perspective Second Edition BusesRunning throughout the system is a c ...
- delphi 最全日期格式_DateUtils时间单元说明
DateUtils时间单元说明 CompareDate 函数 比较两个日期时间值日期部分的大小 CompareDateTime 函数 比较两个日期时间值的大小 CompareTime 函数 比较两个日 ...
- java开发bug 在启动Tomcat 6.0时发现第一条信息便是
MyEclipse 8.5 + tomcat6 + jdk 1.8 启动的时候报错: The APR based Apache Tomcat Native library which allows o ...
- HBase的架构以及各个模块的功能
一:整体架构 1.体系结构 2.物理模型 3.存储体系 regionserver->region->多个store(列簇)->一个memstore和多个storefile 4.HDF ...
- yii2.0框架中session与cookie的用法
我们在开发项目中南面使用到session给和cookie,那么在yii中有他自己的规则 如下案例: session使用 function actionS1(){ echo $t ...