[PCL]1 PCL点云库安装
1.安装文件下载:官网,我还是比较喜欢别人编译好的安装包啊,哈哈。
http://www.pointclouds.org/downloads/windows.html
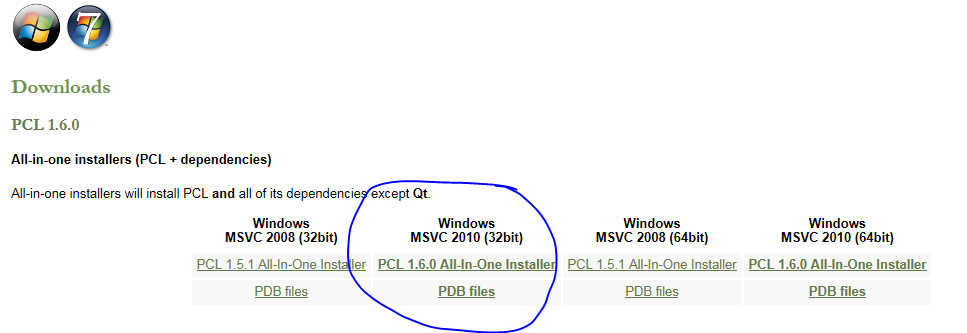
2.傻瓜式安装(下面的依赖项都集成进来了)
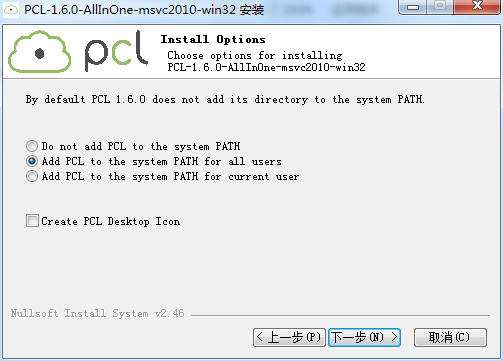 写入环境变量,这个很不错,可选。
写入环境变量,这个很不错,可选。
中间安装了Boost、VTK、Kinect驱动什么的。反正是一路下一步,当然我的机器是Win7系统,之前没有安装过PCL,比较纯净。
之后又单独安装了QT4.8.2的sdk。
3.测试
在安装目录下有share/doc/pcl-1.6/tutorials/sources/pcd_write事例程序,用CMake3.3.2生成VS2010项目文件。
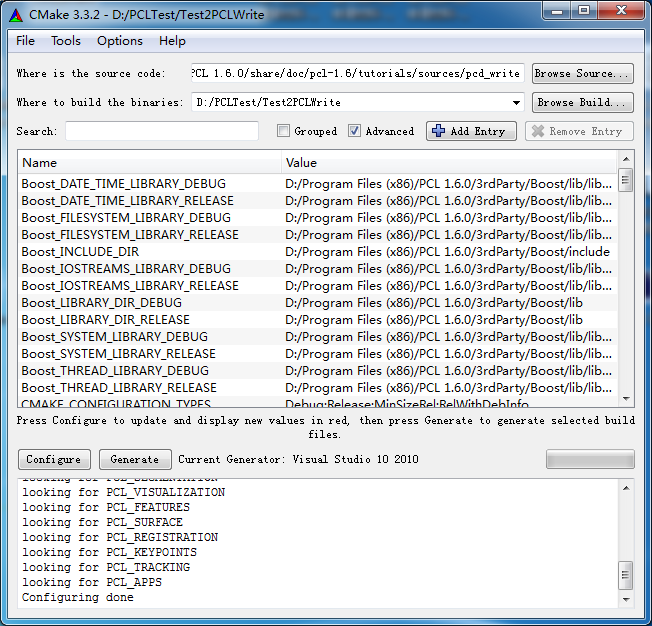
编译运行生成了一个.pcd格式文件。
同样编译下面的程序:D:\Program Files (x86)\PCL 1.6.0\share\doc\pcl-1.6\tutorials\sources\cloud_viewer
这个项目引用了QT4.8.2的sdk的类库。查看刚才生成的.pcd文件,结果如图,大概有几个小点点:
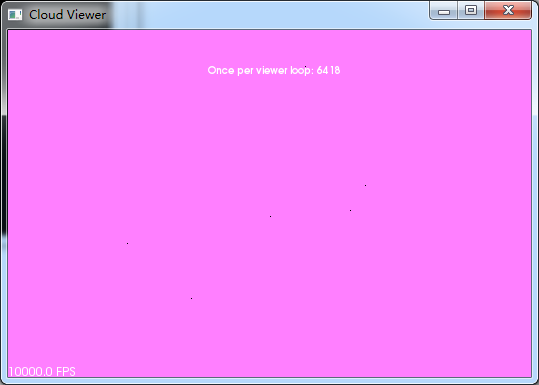
pcd格式文件的基本内容如下:
# .PCD v0.7 - Point Cloud Data file format
VERSION 0.7
FIELDS x y z
SIZE 4 4 4
TYPE F F F
COUNT 1 1 1
WIDTH 5
HEIGHT 1
VIEWPOINT 0 0 0 1 0 0 0
POINTS 5
DATA ascii
1.28125 577.09375 197.9375
828.125 599.03125 491.375
358.6875 917.4375 842.5625
764.5 178.28125 879.53125
727.53125 525.84375 311.28125
附加依赖项:debug
D:\Program Files\PCL\lib\pcl_segmentation_debug.lib
D:\Program Files\PCL\lib\pcl_visualization_debug.lib
D:\Program Files\PCL\lib\pcl_features_debug.lib
D:\Program Files\PCL\lib\pcl_filters_debug.lib
D:\Program Files\PCL\lib\pcl_search_debug.lib
D:\Program Files\PCL\lib\pcl_octree_debug.lib
D:\Program Files\PCL\lib\pcl_sample_consensus_debug.lib
D:\Program Files\PCL\lib\pcl_ml_debug.lib
D:\Program Files\PCL\lib\pcl_kdtree_debug.lib
D:\Program Files\PCL\lib\pcl_io_debug.lib
D:\Program Files\PCL\lib\pcl_common_debug.lib
D:\Program Files\PCL\lib\pcl_io_ply_debug.lib
D:\Program Files\PCL\lib\pcl_surface_debug.lib
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_system-vc100-mt-gd-1_49.lib
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_filesystem-vc100-mt-gd-1_49.lib
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_thread-vc100-mt-gd-1_49.lib
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_date_time-vc100-mt-gd-1_49.lib
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_iostreams-vc100-mt-gd-1_49.lib
release
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_system-vc100-mt-1_49.lib
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_filesystem-vc100-mt-1_49.lib
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_thread-vc100-mt-1_49.lib
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_date_time-vc100-mt-1_49.lib
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_iostreams-vc100-mt-1_49.lib
D:\Program Files\PCL\lib\pcl_io_release.lib
D:\Program Files\PCL\lib\pcl_segmentation_release.lib
D:\Program Files\PCL\lib\pcl_io_ply_release.lib
D:\Program Files\PCL\lib\pcl_ml_release.lib
D:\Program Files\PCL\lib\pcl_features_release.lib
D:\Program Files\PCL\lib\pcl_filters_release.lib
D:\Program Files\PCL\lib\pcl_search_release.lib
D:\Program Files\PCL\lib\pcl_sample_consensus_release.lib
D:\Program Files\PCL\lib\pcl_octree_release.lib
D:\Program Files\PCL\lib\pcl_kdtree_release.lib
D:\Program Files\PCL\lib\pcl_common_release.lib
D:\Program Files\PCL\lib\pcl_surface_release.lib
学习目标:点云的匹配。
[PCL]1 PCL点云库安装的更多相关文章
- Windows下安装PCL点云库
原文链接:http://blog.csdn.net/u012337034/article/details/38270109 简介: 在Windows下安装PCL点云库的方法大概有两种: ...
- PCL 库安装
参考资料: http://www.cnblogs.com/newpanderking/articles/4022322.html VS2010+PCL配置 PCL共有两种安装方式 安全安装版,个人配置 ...
- PCL点云库:对点云进行变换(Using a matrix to transform a point cloud)
点云数据可以用ASCII码的形式存储在PCD文件中(关于该格式的描述可以参考链接:The PCD (Point Cloud Data) file format).为了生成三维点云数据,在excel中用 ...
- 点云库PCL学习
1. 点云的提取 点云的获取:RGBD获取 点云的获取:图像匹配获取(通过摄影测量提取点云数据) 点云的获取:三维激光扫描仪 2. PCL简介 PCL是Point Cloud Library的简称,是 ...
- Windows 8 64位系统 在VS2010 32位软件上 搭建 PCL点云库 开发环境
Windows 8 64位系统 在VS2010 32位软件上 搭建 PCL点云库 开发环境 下载PCL For windows 软件包 到这个网站下载PCL-All-In-One Installer: ...
- 配置点云库PCL时遇到的问题
配置PCL基本参照PCL中国官网教程 http://www.pclcn.org/study/shownews.php?lang=cn&id=34 配置点云库时遇到的问题(基于win8 64位, ...
- PCL点云库:ICP算法
ICP(Iterative Closest Point迭代最近点)算法是一种点集对点集配准方法.在VTK.PCL.MRPT.MeshLab等C++库或软件中都有实现,可以参见维基百科中的ICP Alg ...
- PCL点云库中的坐标系(CoordinateSystem)
博客转载自:https://blog.csdn.net/qq_33624918/article/details/80488590 引言 世上本没有坐标系,用的人多了,便定义了坐标系统用来定位.地理坐标 ...
- ViCANdo新版本发布(PART1) | 点云库(PCL)集成
激光雷达 随着智能驾驶技术的发展,激光雷达迅速的进入工程师的视野,不管是机械式.MEMS还是纯固态激光雷达,本质上都是以一定的速度扫描照射区域,在此过程中激光雷达不断的发出激光并接收反 ...
随机推荐
- Lamda表达式
Lamda表达式 函数式编程的产生(匿名内部类) interface Mes{ public void speak(); } public class Lam { public static void ...
- mysql执行完select后,释放游标
内存释放 在我们执行完SELECT语句后,释放游标内存是一个很好的习惯. .可以通过PHP函数mysql_free_result()来实现内存的释放. 以下实例演示了该函数的使用方法. 2.mysql ...
- 综合支撑【恶灵附身 Psycho Break】的世界观的概念艺术
综合支撑[恶灵附身 Psycho Break]的世界观的概念艺术 三上真司监督提出的,是对着重表现讲述内心恐怖的哪个世界观的创作和统一做了很大贡献的概念艺术. 这里以他经手的艺术为例,来看看稀少的恐 ...
- 推荐25款php中非常有用的类库
推荐25款php中非常有用的类库 投稿:hebedich 字体:[增加 减小] 类型:转载 时间:2014-09-29 作为一个PHP开发者,现在是一个令人激动的时刻.每天有许许多多有用的库分发出 ...
- oracle sqlplus常用命令
登录到sqlplus sqlplus user/pwd@dbname 不登录使用 sqlplus /nolog 查看当前登录用户 show user; 更改用户密码 ALTER USER USER I ...
- javaWeb中struts开发——helloworld
1.新建一个web项目 2.选中project,右键,选择MyElcipse,选择add struts capab...添加struts支持,然后自己命名包 3.Struts在建立jsp时,标签要到 ...
- the basic index concept
Computer Science An Overview _J. Glenn Brookshear _11th Edition Over the years numerous variations o ...
- C#数组的排序
对于数组的排序有好多种方法,上面这种是最常规的方法,当然在Array类中有两个方法就是专门来完成排序的,一会我们再来看这两方法,下面我们还是来看一下语法吧,只要搞懂语法了,就可以自己随便排序了. 冒泡 ...
- [转]如何编写和应用Java的自定义异常类
编写自定义异常类实际上是继承一个API标准异常类,用新定义的异常处理信息覆盖原有信息的过程.常用的编写自定义异常类的模式如下: public class CustomException exten ...
- java override
java override // 覆盖父类的方法,在子类直接调用子类内部这个方法时 public class TestCalc{ protected static class Wine{ String ...