ORB_SLAM2之Pangolin的安装与问题处理
前言
本篇博客中,我们主要介绍了在安装ORB_SLAM2所需的第三方库Pangolin的过程中遇到的一些问题及解决方法。
1.Pangolin是什么?
Pangolin是一个用于OpenGL显示/交互以及视频输入的一个轻量级、快速开发库,下面是Pangolin的Github网址:
https://github.com/stevenlovegrove/Pangolin
2.我们为什么要用Pangolin?在哪里可以用到Pangolin?
ORB_SLAM2中需要有Pangolin的支持。
3.安装过程?
按照Github上面的教程走即可,非常简单(https://github.com/stevenlovegrove/Pangolin)。
(1)安装一些必要的库:
Glew:
sudo apt-get install libglew-dev
CMake:
sudo apt-get install cmake
Boost:
sudo apt-get install libboost-dev libboost-thread-dev libboost-filesystem-dev
Python2 / Python3:
sudo apt-get install libpython2.-dev
(2)在安装完上述依赖后,就可以开始安装Pangolin了,安装过程十分简单:
git clone https://github.com/stevenlovegrove/Pangolin.git
cd Pangolin
mkdir build
cd build
cmake -DCPP11_NO_BOOST= ..
make -j
(3)这时,你可能会遇到如下问题:
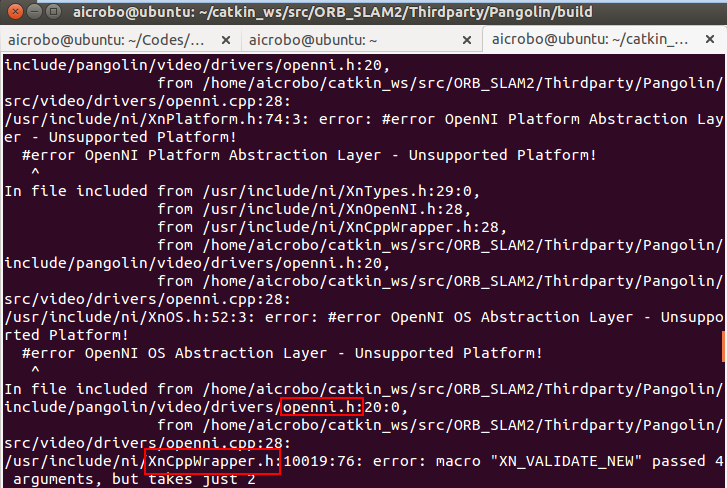
看得很头大是吧?没关系,只要看到错误信息中关键的内容就好了。
提示的错误大部分是跟openni.h和XnCppWrapper.h有关的。
而我们这里编译Pangolin时,并不需要用到OpenNI,可以在编译时将其屏蔽:
cd Pangolin/src
vim CMakeLists.txt (这里选择你自己喜欢的编辑器)
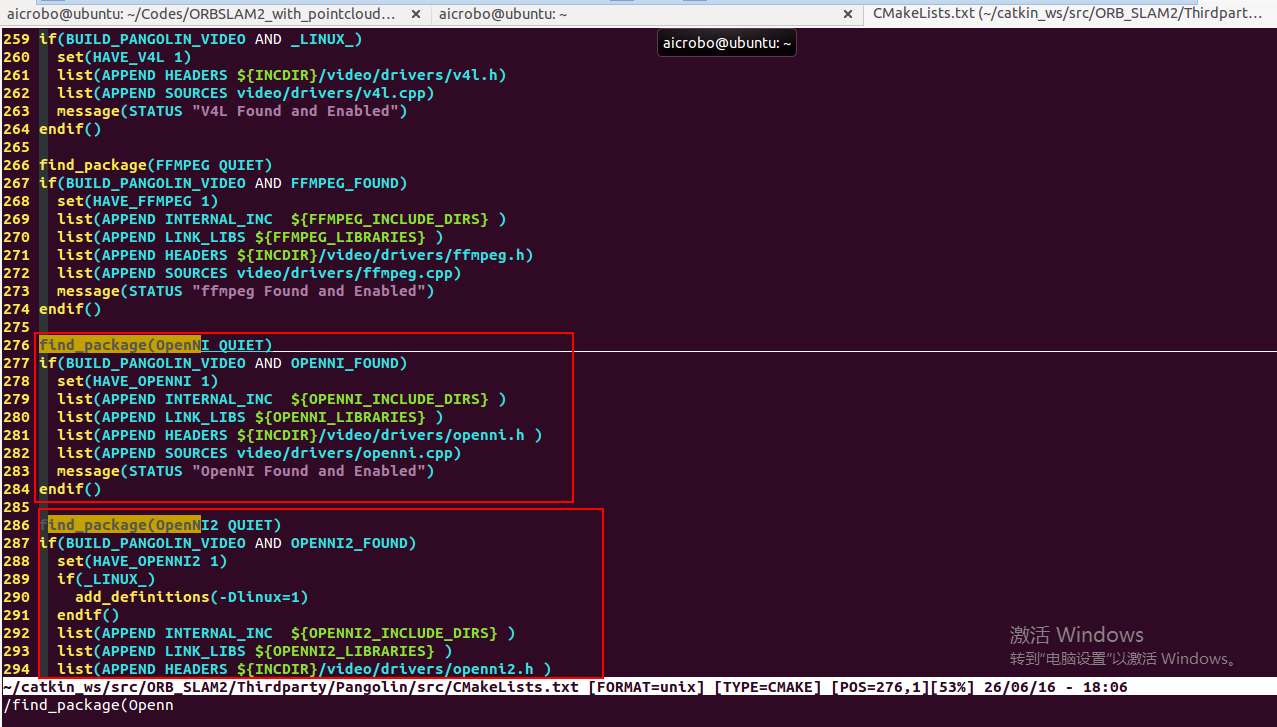
看到这里的OpenNI和OpenNI2的部分了吧,将其全部注释掉即可。
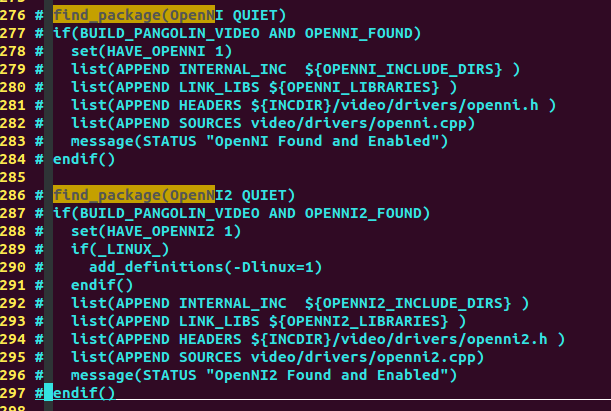
之后,重新编译Pangolin:
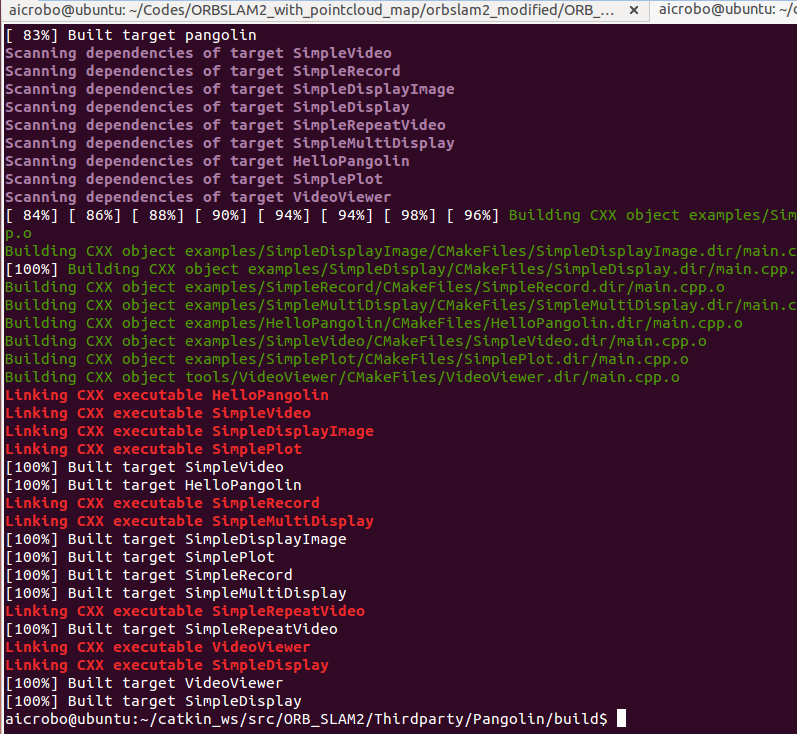
make -j
当你看到下面这个画面时,恭喜你,Pangolin已经安装成功了!
ORB_SLAM2之Pangolin的安装与问题处理的更多相关文章
- ubuntu16.04下安装pangolin
安装教程,具体可以参考github上pangolin的安装文档 https://github.com/stevenlovegrove/Pangolin 首先要安装pangolin的各种依赖项 Glew ...
- 第三方库的安装:Pangolin
Pangolin: 一款开源的OPENGL显示库,可以用来视频显示.而且开发容易. 代码我们可以从Github 进行下载:https://github.com/stevenlovegrove/Pang ...
- ubuntu16.04+Pangolin安装
学习视觉Slam十四讲到第三章的可视化演示的时候需要Panglolin的使用,因此在Githup上下载了安装包:https://github.com/stevenlovegrove/Pangolin ...
- ORB_SLAM3 -- 配置安装
安装环境 Ubuntu20.04 ORB_SLAM3依赖项安装 opencv3 ORB_SLAM3可用opencv3或opencv4编译,作者这里安装测试了opencv3 Step1: 安装openc ...
- ZED 相机 && ORB-SLAM2安装环境配置与ROS下的调试
注:1. 对某些地方进行了更新(红色标注),以方便进行配置. 2. ZED ROS Wrapper官方github已经更新,根据描述新的Wrapper可能已经不适用与Ros Indigo了,如果大家想 ...
- Ubuntu系统配置
0.基本配置 0.1初始设置 (1)开户root账号并重启系统: 打开gedit /usr/share/lightdm/lightdm.conf.d/50-ubuntu.conf 添加greeter- ...
- ORB_SLAM2_Android
链接:https://github.com/FangGet/ORB_SLAM2_Android README.md 说明文件 This Project is out of date 该工程过时了 Th ...
- CMake Tutorial & Example
Tutorial CMakeLists用于告诉CMake我们要对这个目录下的文件做什么事情 cmake 的特点主要有: 1,开放源代码,使用类 BSD 许可发布.http://cmake.org/HT ...
- ORB_SLAM2安装
进入工程目录,我们发现有两个sh文件,一个是build.sh另一个是build_ros.sh. 这两个都可以进行ORB_SLAM2的安装,我们先来看一下build.sh echo "Conf ...
随机推荐
- markown编辑器截图粘贴预览,并将图片传至七牛云
最近在做一个项目,需要实现类似QQ截图后,就是能够在富文本编辑器中粘贴截图并预览. 先看一下效果: 分析一下实现步骤: QQ截图后在编辑器中粘贴,肯定会有一个粘贴事件,即 paste 事件 在事件回调 ...
- 阿里安卓面试分析: Android应用的闪退(crash)问题跟踪和解析
一:问题描述 闪退(Crash)是客户端程序在运行时遭遇无法处理的异常或错误时而退出应用程序的表现,请从crash发生的原因分类与解决方法.在出现crash后如何捕捉并分析异常这两个问题给出自己 ...
- 关于修改编JDK编译环境的问题
最近从svn下拿的代码本地编译测试总是会出一个Unsupported major.minor version 51.0...的问题,出现这样的问题基本上都是因为JDK版本的问题,由于高版本JDK编译的 ...
- 找回mysql数据库root用户的密码
- 极客君教你破解隔壁妹子的wifi密码,成功率高达90%
首先,给大家推荐一个我自己维护的网站: 开发者网址导航:http://www.dev666.com/ 破解wifi密码听起来很复杂,实际上也不是非常的复杂,极客君(微信公众帐号:极客峰)今天教大家如何 ...
- 记一次搭建SS服务器,完整的过程。
前言 这几天为了登录外网查询资料,谷歌经常抽风,国外的博客也打不开,都要整崩溃了.我以前(直到昨天以前)都是使用修改hosts来访问外网的,用的是 老D(https://laod.cn/hosts) ...
- HDU-2298 Toxophily (三分法入门系列)
题意: 意大利炮射出炮弹的速度为v,求在(0,0)击中(x,y)处的目标,发射炮弹的角度. 题解: 设f(α)表示角度为α时, f(α) = vsin(α) * t - 4.9 * t * t ① ...
- 20155237 2016-2017-2 《Java程序设计》第5周学习总结
20155237 2016-2017-2 <Java程序设计>第5周学习总结 教材学习内容总结 语法与继承架构 使用try...catch 与C语言中程序流程和错误处理混在一起不同,Jav ...
- ngrok完成内网映射外网
项目需求: 完成微信公众号开发配置搭建,其中需要一个可以外部访问的域名 实现技术: www.ngrok.cc 实现方式: 在该网站最下方下载需要的ngrok文件,在最上方点击注册,获取token,之后 ...
- iOS 文件下载和打开
最近的项目要用到一个在线报告的下载,于是完成后自己在理一下思路,大体的实现了我要得需求. 话不多说,直接上代码 首先,取到网络文件的链接,进行判段是否需求再次下载还是直接打开 #pragma mark ...