论文阅读笔记三十六:Mask R-CNN(CVPR2017)
论文源址:https://arxiv.org/pdf/1703.06870.pdf
开源代码:https://github.com/matterport/Mask_RCNN
摘要
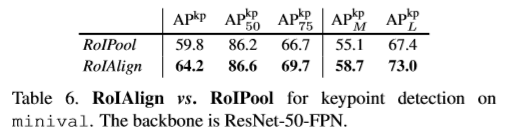
Mask R-CNN可以在进行检测的同时,进行高质量的分割操作。基于Faster R-CNN并进行扩展,增加了一个分支在进行框识别的同时并行的预测目标的mask。Mask R-CNN易于训练,相比Faster R-CNN增加了一点点花销。此外,Mask R-CNN可以很容易扩展至其他任务中。如关键点检测。本文在COCO数据集中的三个任务效果表现优异,包含实例分割,边界框的目标检测及关键点检测。
介绍
本文的目标在于建造一个有效进行实例分割的系统。实例分割由于需要对图片中的所有目标进行正确的检测及分割,具有一定的挑战性。 因此,本文结合目标检测及分割两种计算机视觉任务。目标检测的目标是对单独的object进行分类。同时,使用框对每个位置进行定位操作。 分割是不管不同的实例目标对每个像素进行分类。
Mask R-CNN扩展Faster R-CNN通过增加一个分支用于预测每个RoI的分割masks.同时,利用现有的分支进行分类及框回归任务。如下图,mask分支是一个小型的FCN应用到每个RoI上,以像素级的方式进行分割预测。

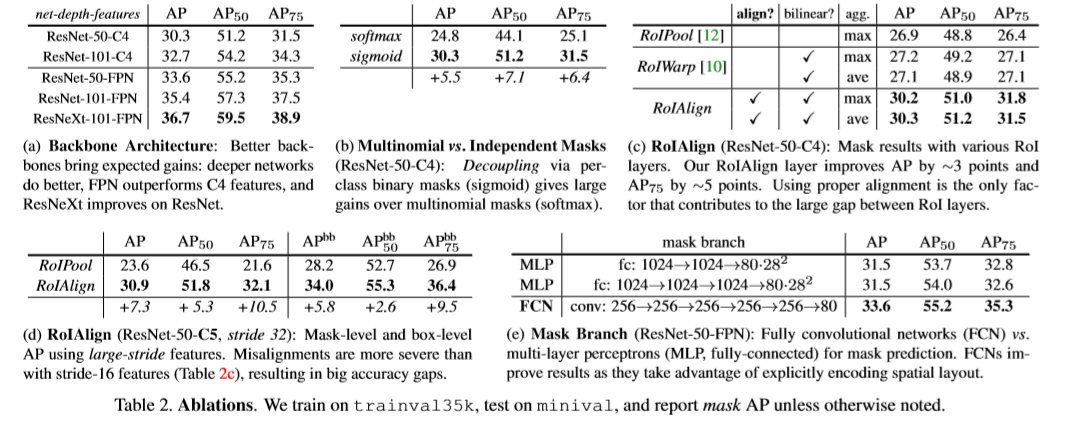
Mask R-CNN基于Faster R-CNN训练更快,同时,可以扩展结构设计用于其他任务。Faster R-CNN中网络的输入与输出并未满足像素级别的对齐。这是因为RoiPool在特征提取过程中进行粗糙的空间量化操作效果明显。为了解决不匹配的情况,本文提出了一个简单的去量化层RoIAlign,可以准确的保存空间位置。设计上进行了一点改造,RoIAlign发挥重大作用:将mask的准确率相对提升了10%至50%。另外,本文发现同时进行mask与分类十分重要。针对每个类别进行二分类。同时,依赖于网络的RoI分类分支进行类别预测。相反,通常对每个像素进行多分类操作。Mask R-CNN重点在于实例级别的分析。
Mask R-CNN
Faster R-CNN中每个候选目标有两个输出,一个为类别,另一个为边界框的偏移。Mask R-CNN增加了一个分支用于输出目标的mask。Mask 输出与分类及框预测输出是独立的,mask需要提取大量目标的合适形状信息。
Faster R-CNN
主要包含两部分,(1)Region Proposal Network(RPN)用于提取候选目标框。(2)此部分本质上为Fast R-CNN,对每个候选框利用RoIPool提取特征,接着执行分类及框回归操作。 提取的特征被共享便于更快的推理。
Mask R-CNN
Mask R-CNN同样采用两阶段处理过程。第一阶段的操作相同,为RPN,在第二阶段,并行的进行分类及框偏移预测。Mask R-CNN同时针对每个RoI输出一个二分类的mask。参考Fast R-CNN同时进行边界框的分类及回归。大大简化了R-CNN的多阶段过程。
正常情况下,训练时,针对每个RoI样本定义一个多任务的损失: 分类损失与边界框损失与Fast R-CNN相似。mask 分支中,针对么个RoI,包含Km^2维度的输出。用于编码K个二分类的mask,大小为mxm,针对K个类别。因此,我们应用一个像素级的sigmoid。定义Lmask为平均二分类交叉熵损失函数。与类别K相对应的ground truth,Lmaks只定义第k个mask。其他mask的输出对此loss损失无影响。Lmask的定义允许网络生成每个类别的masks,与其他类别无关。依赖于分类分支,用于预测输出mask的标签。这里,包含mask及类别的预测。同时,与常用的FCN不同,基于像素级的损失函数及交叉熵损失。本文中,基于像素级的sigmoid及二分类损失,不存在类别之间的竞争。
分类损失与边界框损失与Fast R-CNN相似。mask 分支中,针对么个RoI,包含Km^2维度的输出。用于编码K个二分类的mask,大小为mxm,针对K个类别。因此,我们应用一个像素级的sigmoid。定义Lmask为平均二分类交叉熵损失函数。与类别K相对应的ground truth,Lmaks只定义第k个mask。其他mask的输出对此loss损失无影响。Lmask的定义允许网络生成每个类别的masks,与其他类别无关。依赖于分类分支,用于预测输出mask的标签。这里,包含mask及类别的预测。同时,与常用的FCN不同,基于像素级的损失函数及交叉熵损失。本文中,基于像素级的sigmoid及二分类损失,不存在类别之间的竞争。
Mask Representation
mask将输入目标的空间外形进行编码。因此,不同于通过全连接层压缩为向量的类别标记及框偏差,可以通过卷积提取mask的像素级空间结构特征。对于每个RoI使用FCN预测一个mxm的mask。使mask分支中的每一层保持mxm的目标空间形状信息,而不是将特征压缩为向量,从而丢失空间维度。不同于全连接层进行mask预测,全卷积表述需要更少的参数量,同时准确率较高。为了实现像素对像素,要求feature maps很小的RoI特征,很好的保留每个像素对应的空间响应。为此,本文提出了RoIAlign。在进行mask 预测时发挥着重要作用。
RoIAlign
RoIPool对每个RoI提取小feature map(7x7)的标准方法。RoIPool首先量化浮点数的RoI得到离散化feature map。离散处理后的RoI被分为几个空间bins。其中,每个bin也是离散的。每个bin通过最大池化处理得到一个特征值。在连续的坐标x上执行量化操作,如[x/16],16代表feature map的stride,[.]代表近似操作。量化操作在划分bins中。量化操作使RoI与提取的特征不匹配。此变化对类别预测无影响,但是十分不利于像素级的mask预测。
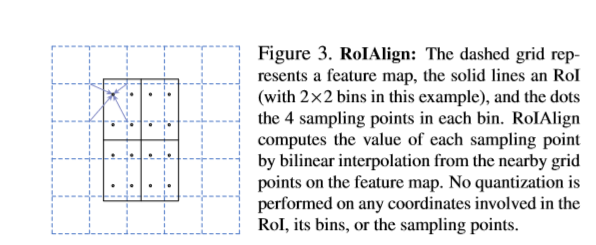
为解决RoI与feature map不匹配问题,本文提出了RoIAlign,用于消除RoIPool造成的量化损失,使提取的特征与输入进行精准的匹配。本文的方法很简单:去除RoI边界或bins中的所有量化操作。比如,使用x/16替换为[x/16]使用双线性插值计算每个RoI bi中输入特征四个角采样位置的精确值,通过使用最大化和均值操作得到结果。如下图,值得注意的是,采样位置及采样点的个数对结果无影响,中间并无量化操作。
Network Architecture
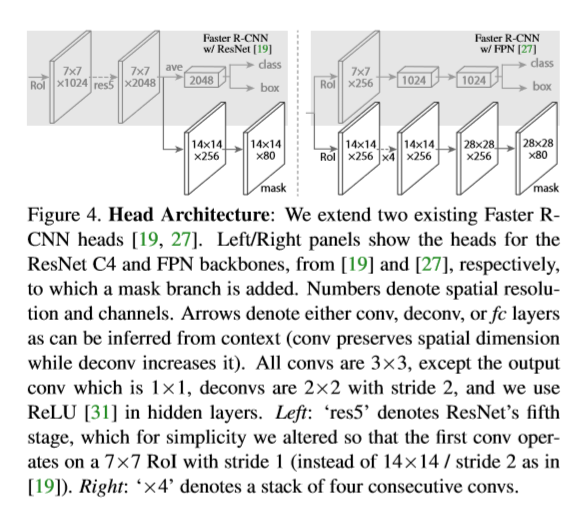
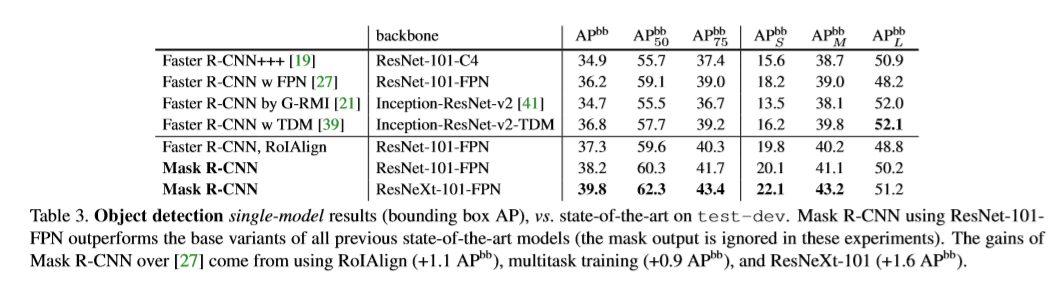
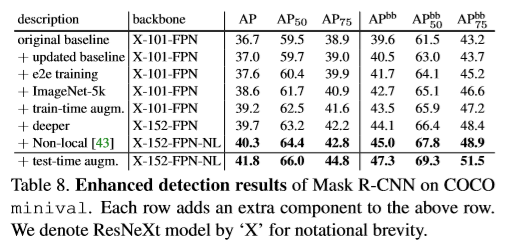
为了证明Mask R-CNN结构的通用性,将Mask R-CNN应用多几个结构。按如下几类特征进行区分:(1)卷积网络结构作为backbone用于提取整张图片的特征。(ii)网络的头部用于边界框的识别(分类及回归)每个RoI单独进行mask预测。本文用网络深度特征作为backbone结构。分别用50层的ResNet及101层的ResNetXt作为backbone。原始的基于ResNet的Faster R-CNN从第四stage的最后一层卷积层进行特征提取。称为C4。本文也采用FPN作为backbone。FPN使用自上而下带侧连接的结构对于单个尺寸的输入建立特征金字塔。通过基于ResNet-FPN的Mask R-CNN取得了较大的提高。
对了网络的头部,在原有网络基础上增加了一个全卷积用于mask预测的分支。更确切的说是本文扩展了Faster R-CNN的box的head。细节如下。
Implementation Details
基于Fast/Faster R-CNN进行参数初始化。
训练:如同Fast R-CNN 当RoI与ground truth的阈值超过0.5则规定为正样例,否则规定为负样例。mask损失只定义在正样例样本(RoI)上。输入图片进行resize操作,尺寸为800x800,mini-batch为2,每张image包含N个采样RoIs。正负样例的比例为1:3,对于基于ResNet的N设置为64,对于FPN的N设置为512;weight decay为0.0001,动量为0.3.RPN中的anchor设置为5个尺寸及3个比例。为方便起见,RPN单独进行训练,与Mask R-CNN不进行特征共享。由于RPN与Mask R-CNN存在相同的backbone,因此,可以进行特征共享。
推理:测试时,proposal的数量为基于ResNet的为300,对于FPN的为1000。在这些proposal上进行box分支预测,同时,使用NMS处理。maks分支应用到分数最高的100个检测框。由于数量少但精度较高的RoIs的存在,mask分支可以对每个RoI预测K个masks。但本文并未使用全部的K个类别,而时只使用分类分支预测出的类别。将mxm大小的浮点数mask 输出进行resize操作,调整至RoI大小,同时以阈值0.5进行二值化处理。
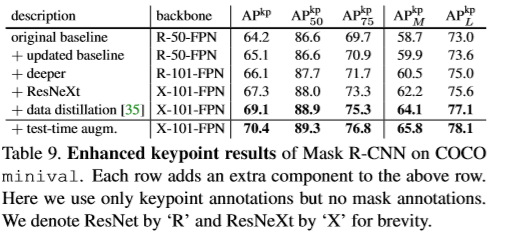
实验





Reference
[1] M. Andriluka, L. Pishchulin, P. Gehler, and B. Schiele. 2D human pose estimation: New benchmark and state of the art analysis. In CVPR, 2014. 8
[2] P. Arbel´aez, J. Pont-Tuset, J. T. Barron, F. Marques, and J. Malik. Multiscale combinatorial grouping. In CVPR, 2014. 2
[3] A. Arnab and P. H. Torr. Pixelwise instance segmentation with a dynamically instantiated network. In CVPR, 2017. 3, 9
[4] M. Bai and R. Urtasun. Deep watershed transform for instance segmentation. In CVPR, 2017. 3, 9
[5] S. Bell, C. L. Zitnick, K. Bala, and R. Girshick. Insideoutside net: Detecting objects in context with skip pooling and recurrent neural networks. In CVPR, 2016. 5
[6] Z. Cao, T. Simon, S.-E. Wei, and Y. Sheikh. Realtime multiperson2dposeestimationusingpartaffinityfields. InCVPR, 2017. 7, 8
论文阅读笔记三十六:Mask R-CNN(CVPR2017)的更多相关文章
- 论文阅读笔记四十六:Feature Selective Anchor-Free Module for Single-Shot Object Detection(CVPR2019)
论文原址:https://arxiv.org/abs/1903.00621 摘要 本文提出了基于无anchor机制的特征选择模块,是一个简单高效的单阶段组件,其可以结合特征金字塔嵌入到单阶段检测器中. ...
- 论文阅读笔记三十:One pixel attack for fooling deep neural networks(CVPR2017)
论文源址:https://arxiv.org/abs/1710.08864 tensorflow代码: https://github.com/Hyperparticle/one-pixel-attac ...
- 论文阅读笔记二十六:Fast R-CNN (ICCV2015)
论文源址:https://arxiv.org/abs/1504.08083 参考博客:https://blog.csdn.net/shenxiaolu1984/article/details/5103 ...
- 论文阅读笔记五十六:(ExtremeNet)Bottom-up Object Detection by Grouping Extreme and Center Points(CVPR2019)
论文原址:https://arxiv.org/abs/1901.08043 github: https://github.com/xingyizhou/ExtremeNet 摘要 本文利用一个关键点检 ...
- 论文阅读笔记三十九:Accurate Single Stage Detector Using Recurrent Rolling Convolution(RRC CVPR2017)
论文源址:https://arxiv.org/abs/1704.05776 开源代码:https://github.com/xiaohaoChen/rrc_detection 摘要 大多数目标检测及定 ...
- 论文阅读笔记三十八:Deformable Convolutional Networks(ECCV2017)
论文源址:https://arxiv.org/abs/1703.06211 开源项目:https://github.com/msracver/Deformable-ConvNets 摘要 卷积神经网络 ...
- 论文阅读笔记三十五:R-FCN:Object Detection via Region-based Fully Convolutional Networks(CVPR2016)
论文源址:https://arxiv.org/abs/1605.06409 开源代码:https://github.com/PureDiors/pytorch_RFCN 摘要 提出了基于区域的全卷积网 ...
- 论文阅读笔记三十四:DSSD: Deconvolutiona lSingle Shot Detector(CVPR2017)
论文源址:https://arxiv.org/abs/1701.06659 开源代码:https://github.com/MTCloudVision/mxnet-dssd 摘要 DSSD主要是向目标 ...
- 论文阅读笔记三十二:YOLOv3: An Incremental Improvement
论文源址:https://pjreddie.com/media/files/papers/YOLOv3.pdf 代码:https://github.com/qqwweee/keras-yolo3 摘要 ...
随机推荐
- 微信小程序弹出可填写框两种方法
方法一: html页面: < view class = "container" class = "zn-uploadimg" > < butt ...
- SFTP远程连接服务器上传下载文件-vs2010项目实例
本项目仅测试远程连接服务器,支持上传,下载文件,更多功能开发请看API自行开发. 环境:win7系统,vs2010 vs2010项目实例下载地址:CSDN下载 如果没有CSDN积分,百度网盘下载(密码 ...
- Vue获取事件源
设置事件源 <label :data-weight="item1.EvaluateWeight" @click='radioClick' :data-id="ite ...
- python进程.线程和协程的总结
I.进程: II.多线程threading总结 threading用于提供线程相关的操作,线程是应用系统中工作的最小单位(cpu调用的最小单位). Python当前版本的多线程没有实现优先级,线程组, ...
- async_retrying
from async_retrying import retry import aiohttp import asyncio @retry(attempts=6) async def fetch(): ...
- mysql导入sqlserver数据库表
原文:https://zhidao.baidu.com/question/1114325744502691499.html 在Navicat for MySQL 管理器中,创建目标数据库(注意:因为是 ...
- 空串、null串和isEmpty方法
空串 空串""是长度为0的字符串.可以调用以下代码检查字符串是否为空: if(str.length() == 0) 或 if(str.equals("")) 空 ...
- web-font 个人学习小总结
个人觉得 web-font 分为两种: 第一种就是真正文本字体,客户端没有安装的字体通过远程加载字体来实现特殊字体提高用户体验: icodon.com : http://icodon.com/goo ...
- 前端 ----jQuery的介绍
01-jQuery的介绍 1.为什么要使用jQuery 在用js写代码时,会遇到一些问题: window.onload 事件有事件覆盖的问题,因此只能写一个事件. 代码容错性差. 浏览器兼容性问题 ...
- 【原创】测试基础之http_load(1)简介、安装、使用
http_load-09Mar2016官方:https://acme.com/software/http_load/ 一 简介 http_load - multiprocessing http tes ...