《deep sort》复现过程
1. 准备代码与数据
克隆到本地服务器
git clone https://github.com/nwojke/deep_sort.git
下载MOT16数据集(MOT:Multi-Object Tracking, 16的意思是相比MOT15多了更多的细节信息)
MOT16数据集
1.1 数据集介绍
该数据集分为了test和train,每个文件夹有7个子文件夹。
./MOT16/train

以训练集中的MOT16-02为例,探究数据数据集格式:
MOT16-02下包含三个四个子文件:det、gt、img1、seqinfo.ini
1.1.1 det:
det下只有一个文件,det.txt。每行一个标注,代表一个检测物体
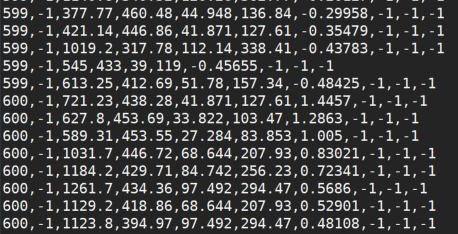
格式为:
, , , , , , , , ,
- :第几帧(可以看到img1中共600帧图)
- :目标运动轨迹编号(在目标文件中都为-1)
- <bb_* >:bbox的坐标尺寸
- : 分类的置信度分数
- <x, y, z> :用于3D检测,2D检测总是为1
1.1.2 img1
这个目录就是把视频一帧帧抽取出来的图片,总共600张。文件命名从000001.jpg到000600.jpg。
1.1.3 gt
gt文件夹下只有一个文件,gt.txt

第1个值:视频帧号
第2个值:目标运动轨迹的ID号
第3-6值:bbox坐标(x, y, w, h)
第7个值:目标轨迹是否进入考虑范围(0:忽略, 1:active)
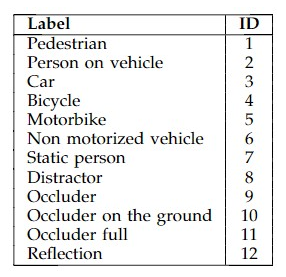
第8个值:该轨迹对应的目标种类
第9个值:
box的visibility ratio,表示目标运动时被其他目标box包含/覆盖或者目标之间box边缘裁剪情况。
1.1.4 seqinfo.ini文件
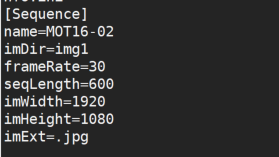
视频的基本信息介绍
2. 运行目标跟踪器
python deep_sort_app.py \
--sequence_dir=./MOT16/test/MOT16-06 \
--detection_file=./resources/detections/MOT16_POI_test/MOT16-06.npy \
--min_confidence=0.3 \
--nn_budget=100 \
--display=True
#在自己生成的feature运行tracker
python deep_sort_app.py \
--sequence_dir=./MOT16/test/MOT16-01 \
--detection_file=./resources/detections/wemo_test/MOT16-01.npy \
--min_confidence=0.3 \
--nn_budget=100 \
--display=True

可选参数解释:
--sequence_dir:视频切成图片序列的文件夹,包含帧序列,每一帧的帧号、目标的bbox、
--detection_file:检测的权重文件 .npy
--output_file:输出类似于gt.txt的文件格式,轨迹不再是默认-1,发生变化
--min_confidence:检测结果阈值。低于这个阈值的检测结果将会被忽略
--nms_max_overlap:非极大抑制的阈值
--max_cosine_distance:余弦距离的控制阈值
--nn_budget:描述的区域的最大值
--display:显示目标追踪结果
3. generating detections
generate features for persons re-identification.
python tools/generate_detections.py \
--model=resources/networks/mars-small128.pb \
--mot_dir=./MOT16/train \
--output_dir=./resources/detections/MOT16_train
#自定义生成feature
python tools/generate_detections.py \
--model=resources/networks/mars-small128.pb \
--mot_dir=./MOT16/test \
--output_dir=./resources/detections/wemo_test
--model:是模型框架的权重参数文件
输入:

输出:

4. 如何在自己的数据上运行deep_sort,实现目标追踪?
4.1 test
- 需要视频文件
- 需要目标检测detection的权重文件(npy 文件)(ps:目标检测框架和deep_sort框架应该一致)
效果:直观来看还不错,当然这是基于目标检测的检测的结果,如果检测不到目标,tracking也无法做。当人行走过程中,被遮挡之后再次出现,目标ID还是维持不变。(思考:这里人一般是直线前行,如果目标在遮挡之后,掉头再出现,可能ID就会变化)。
很大的问题:生成的视频帧率很低,不到30FPS,肉眼能看出明显卡顿。(网上说通过优化可以达到高帧率,具体待查)
4.2 train
如何训练?
余弦度量学习方法
《deep sort》复现过程的更多相关文章
- ShadowBroker释放的NSA工具中Esteemaudit漏洞复现过程
没有时间测试呢,朋友们都成功复现,放上网盘地址:https://github.com/x0rz/EQGRP 近日臭名昭著的方程式组织工具包再次被公开,TheShadowBrokers在steemit. ...
- 多目标跟踪(MOT)论文随笔-SIMPLE ONLINE AND REALTIME TRACKING WITH A DEEP ASSOCIATION METRIC (Deep SORT)
网上已有很多关于MOT的文章,此系列仅为个人阅读随笔,便于初学者的共同成长.若希望详细了解,建议阅读原文. 本文是tracking by detection 方法进行多目标跟踪的文章,在SORT的基础 ...
- Struts2 REST 插件 XStream 远程代码执行漏洞 S2-052 复现过程
v\:* {behavior:url(#default#VML);} o\:* {behavior:url(#default#VML);} w\:* {behavior:url(#default#VM ...
- NSA Fuzzbunch中EternalRomance工具复现过程
自Shadow Brokers公布NSA泄露工具后,各路大神陆陆续续发表复现过程,这几天也仔细试了各种套路,一直想弄明白DoublePulsar中的shellcode到底是如何用的,刚好又在模拟环境中 ...
- 【3D】PoseCNN姿态检测网络复现过程记录
最近在研究室内6D姿态检测相关问题,计划在PoseCNN网络基础上进行改进实现.但是在第一步的复现过程中踩了无数的坑,最终成功运行了demo,但目前数据集train还是遇到了一些问题.有问题欢迎一起交 ...
- Linux sudo权限提升漏洞CVE-2021-3156 POC及复现过程
漏洞简介 2021年1月26日,国外研究团队披露了sudo 中存在的堆溢出漏洞(CVE-2021-3156).利用该漏洞,非特权账户可以使用默认的sudo配置主机上获取root权限,该漏洞影响1.8. ...
- php反序列化漏洞复现过程
PHP反序列化漏洞复现 测试代码 我们运行以上代码文件,来证明函数被调用: 应为没有创建对象,所以构造函数__construct()不会被调用,但是__wakeup()跟__destruct()函数都 ...
- MapReduce:详解Shuffle(copy,sort,merge)过程(转)
Shuffle过程是MapReduce的核心,也被称为奇迹发生的地方.要想理解MapReduce, Shuffle是必须要了解的.我看过很多相关的资料,但每次看完都云里雾里的绕着,很难理清大致的逻辑, ...
- CVE-2020-2551复现过程
项目地址 cnsimo/CVE-2020-2551 CVE-2020-2551 weblogic iiop 反序列化漏洞 该项目的搭建脚本在10.3.6版本经过测试,12版本未测试. 环境 kali+ ...
随机推荐
- c++关键字static的作用
1.隐藏 当同时编译多个源文件(.cpp)时,在某一个源文件中用static修饰的全局变量或函数,对其他源文件是隐藏的 //1.cpp ; void fun() { cout << < ...
- NSUserDefaults 添加与删除
//NSUserDefaults会创建一个plist文件,内部存放一个字典 NSUserDefaults *userDefaults = [NSUserDefaults standardUser ...
- Is Docker Good for Your Database?
https://dzone.com/articles/is-docker-good-for-your-database
- java基础-day22
第11天 多线程 今日内容介绍 u 多线程概述 u 线程实现 u 多线程安全问题产生 & 解决方案 第1章 多线程概述 学习多线程之前,我们先要了解几个关于多线程有关的概念. A ...
- 一天学习两个设计模式之Facade模式(外观模式,结构型模式)
程序这东西随着时间推移,程序会越来越大,程序中的类越来越多,而且他们之间相互关联,这会导致程序结构变得越来越复杂.因此我们在使用他们时候,必须要弄清楚他们之间的关系才能使用他们. 特别是在调用大型程序 ...
- C语言中:static与extern对变量和函数的作用
1.两者对全局变量 static对全局变量,表示定义一个内部变量 extern对全局变量,表示声明一个外部变量 说明: 1.内部变量:定义的变量只能在本文件中访问,不能被其他文件访问. 2.不同文件中 ...
- Kafka auto.offset.reset
要从头消费kafka的数据,可以通过以下参数: Kafka auto.offset.reset = earliest
- firefox浏览器testclient测试接口
- CentOS下下载软件,不安装的方法
今天来说下在CentOS下下载软件,不安装的方法: 方法一:通过yum自带一个工具:yumdownloader[root@web1 ~]# rpm -qa |grep yum-utils[root@ ...
- G 最水的一道
G - Here Be Dragons The Triwizard Tournament's third task is to negotiate a corridor of many segment ...