ARHUD驾车导航技术概览

ARHUD (Augmented Reality Head Up Display),即增强现实与抬头显示的结合,是一种将渲染元素投影在真实世界的技术,也是目前用户理解成本最低的展示方式。
HUD功能第一次应用是在二战中,被应用在枪械和战斗机上,80年代初期开始转向民用,90年代初期技术概念被正式提出,并被演变成为汽车上的功能。其实,汽车上还有很多军用转民用的配置,例如惯导装置。
ARHUD驾车导航,就是把车速限速、转向动作、引导线等重要的导航信息,投影到驾驶员视野正前方 ,让驾驶员尽量做到不低头、不转头就能看驾驶引导信息。
高德在ARHUD驾车导航方面做了大量研发工作并拥有业界领先的技术储备和实践经验,在2022年8月,高德地图与北汽、华为合作,推出北汽魔方ARHUD导航。
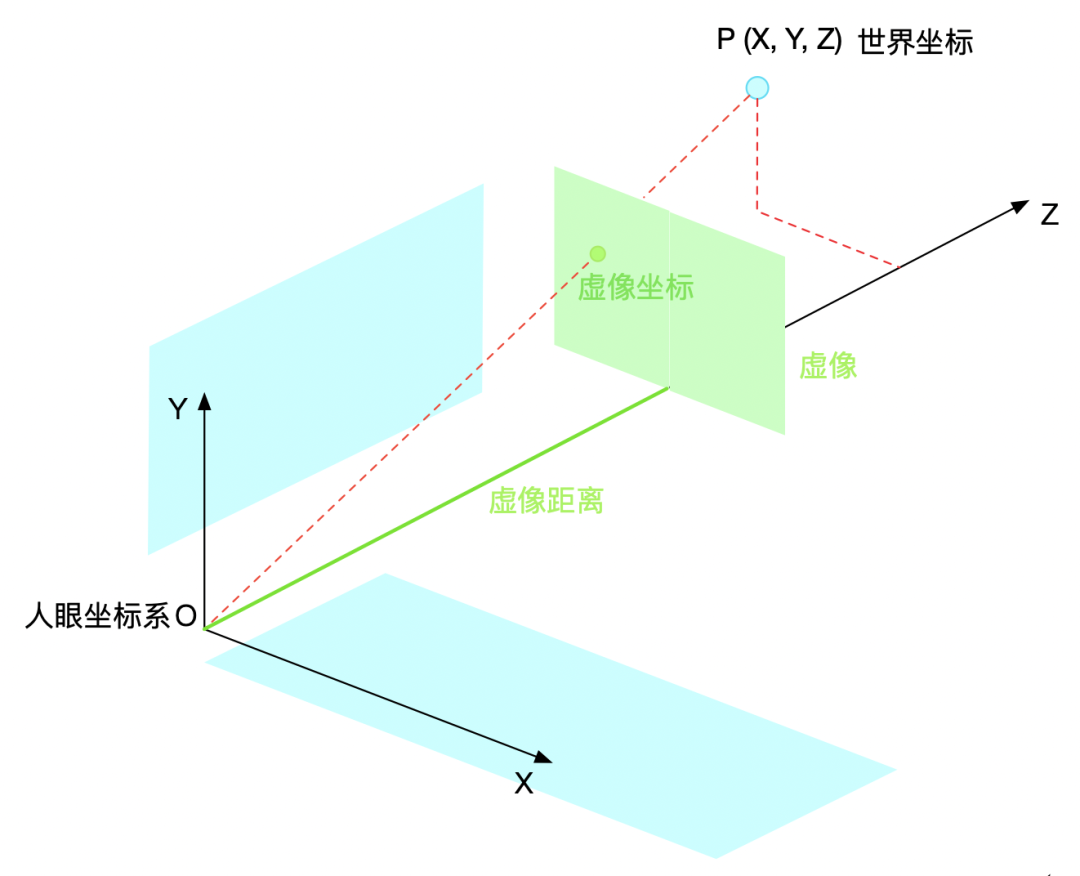
1.虚像距离(Virtual Image Distance)

虚像距离,Virtual Image Distance,简称VID,简单点说就是虚像到人眼的视觉距离 ,大家都知道人的眼睛也是有焦距的,看远和看近的焦距不同,因此如果VID的距离不够远,在看向较远的地方时ARHUD的显示会由于眼睛焦距的原因而虚化。
传统HUD的VID距离也就是在2.5米左右,而AR HUD的VID距离往往在10米以上,要做到跨车道显示的话,需要投影距离达到20米才行。
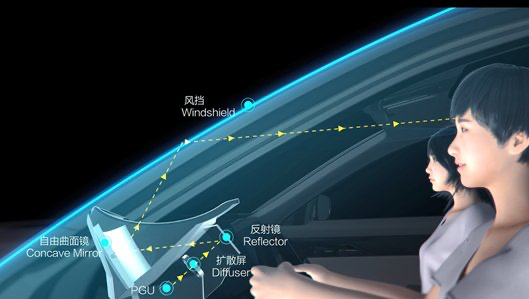
传统W-HUD其实可以理解为一个投影仪,将图像反射,投影到了挡风玻璃上(例如手机高德地图的HUD投影功能),实际上相当于把原本显示在仪表盘上的信息,投射到挡风玻璃上。其实这也是HUD设计的初衷——驾驶员不需要低头即可获得车辆行驶的相关信息。
但是W-HUD的图像尺寸有限(通常投影距离3m,显示尺寸15-20寸),能显示的信息较少,且图像不会与道路融合,驾驶员仍然需要将视线从路面上移开,重新对焦才能获得信息,这实际上违背了HUD的设计初衷。
2.视场角(Field Of View)

视场角,Field Of View,简称FOV,视场角包括了以驾驶员眼睛为中心的水平视场角和垂直视场角。 传统HUD的FOV很小,一般只有5度。而AR HUD的水平视场角要在10°以上,理想ONE的ARHUD能够达到20°,问界M5的ARHUD也能够达到13°。
3.人眼位置(Eye Point)
人眼坐标(x, y, z),相对于车体坐标系的位置,以车头中心为坐标原点,单位 米。
人眼坐标会随着驾驶者的高矮、坐姿、头部位置移动而动态调整。


4.虚像旋转角度(三自由度)
4.1. 沿X轴旋转角度(LDA、下视角)

4.2. 沿Y轴旋转角度(横滚角)

4.3. 沿Z轴旋转角度(朝向角)
5.虚像坐标转换(世界坐标转虚像坐标)
首先,看一下在相机投影中,世界坐标 转 像素坐标。

然后,看一下在HUD投影中,世界坐标 转 虚像坐标(单位也是像素)。
在已知 虚像距离、视场角、人眼位置、虚像角度 的前提下,就可以进行 世界坐标 与 虚像坐标 的互相转换。
通过对比相机投影 和 HUD投影 可以发现,相机投影中的焦距 与 HUD投影中的虚像距离 有着紧密联系。
人的眼睛也是有焦距的,看远和看近的焦距不同,因此如果虚像距离不够远,在看向较远的地方时ARHUD的显示会由于眼睛焦距的原因而虚化。
所以,虚像距离 联系着 人眼的焦距。
如果虚像距离过小,驾驶员需要将视线从路面上移开,重新对焦才能看清HUD上的信息,这实际上违背了HUD的设计初衷。
6.坐标转换的应用
6.1. 验证虚像投影是否准确
面临问题 :虚像投影主要目的是将真实世界坐标投影在虚像中,如果无法做到准确对应,会影响ARHUD准确性。
解决方法 :由硬件系统方传入投影参数——虚像距离、视场角、人眼位置、虚像分辨率、虚像角度,计算出投影矩阵,通过该矩阵可进行 虚像坐标 与 车体世界坐标 的转换。
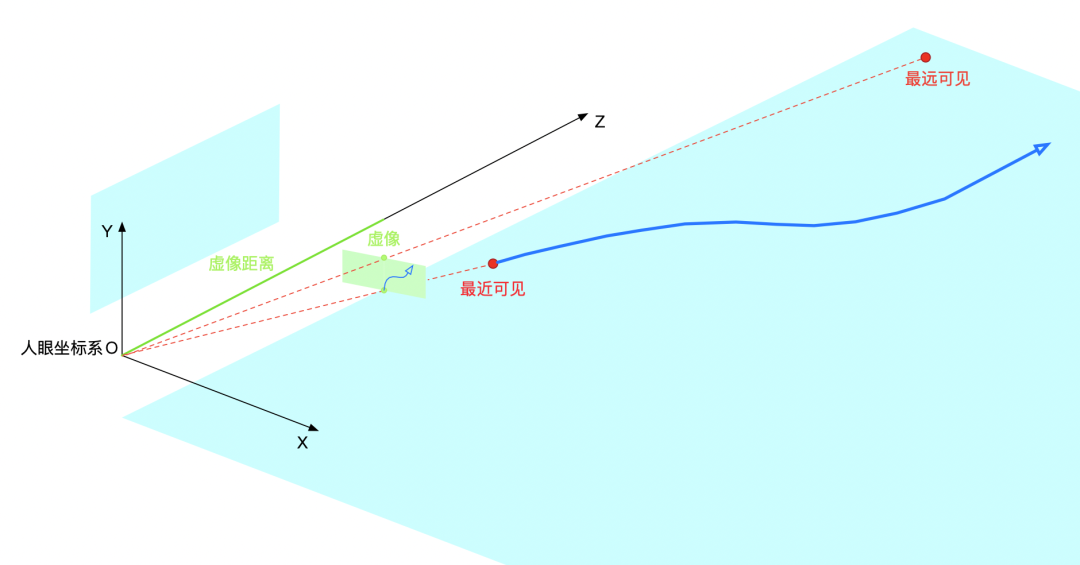
取虚像上几个具有代表性的像素坐标(一般是九个点),转换成车体世界坐标,即可计算出虚像可视范围——最远可见、最近可见、最左可见、最右可见、中心可见。
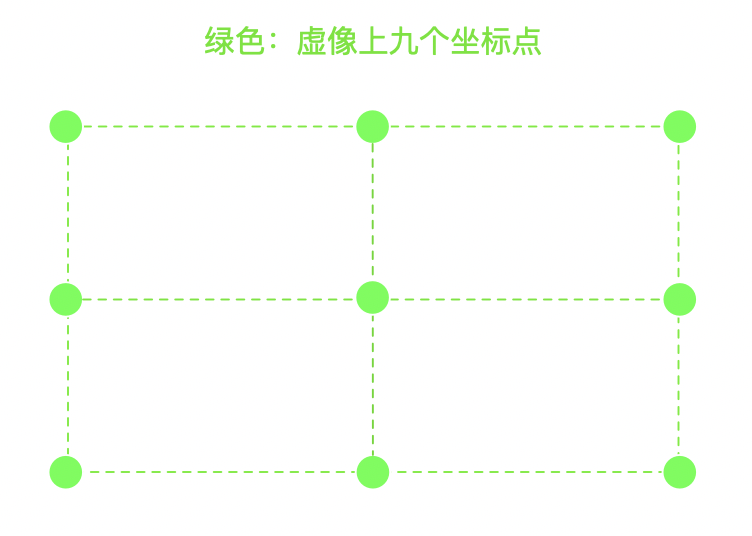
在计算出的可视范围上放置标识物体(车前方),查看该标识物体在虚像中的位置,是否与九个点重合,如果重合则代表投影准确,如果不重合则投影误差较大,需要通知硬件系统方进行调整。
6.2. 解决变道引导线超出虚像显示区
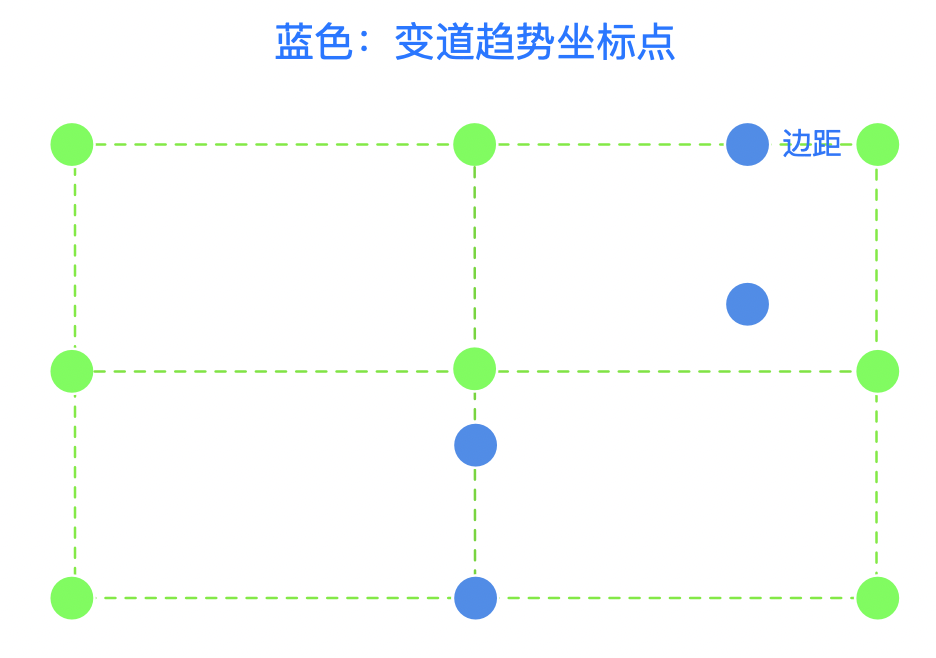
面临问题 :AR导航中的变道引导线是贴合真实世界指向相邻应行驶车道的,如果虚像可视范围无法覆盖相邻车道,则会导致变道线超出显示区。
解决方法 :根据变道信息(向左变道、向右变道、变到几车道),在虚像上取几个趋势性像素坐标,转换成 车体世界坐标,最终投影出来。因为是在虚像上取的坐标,所以始终不会超出虚像显示区域。
7.ARHUD 硬件技术
7.1. TFT
即TFT-LCD,其原理是LED发出的光透过液晶单元后将屏幕上的信息投射出去。
优点 :该方案是业界最早开发的投影方案,方案成熟,相对成本低。(目前国外供应商能做到2500-3000左右,本土供应商能做到2000左右。随着技术的成熟和相关产业链的发展,成本应该可以进一步做到2000以内)。
缺点 :阳光倒灌问题难以解决。亮度不够,在白天显示效果较差。

7.2. DLP
即Digital Light Processing的缩写,采用TI的DMD芯片,把影像信号经过数字处理再投射出来。
优点 :DMD芯片可确保投影的活动影像色彩艳丽、细腻逼真、自然真实。由于经过数字化处理,可将图像中的缺陷抹去。DMD芯片更小、更易于携带。
缺点 :造价更贵(成本在5000元以上)。
DLP可能出现彩虹效应,影像信号在数字处理过程中颜色混合及转换异常。
DLP显示屏由于需要采用TI的DMD芯片,涉及到技术专利,因此只有奔驰和传祺两家车型在用。

7.3. LCOS
即Liquid Crystal on Silicon的缩写,即液晶附硅,也叫硅基液晶,是一种基于反射模式,尺寸比较小的矩阵液晶显示装置。这种矩阵采用CMOS技术在硅芯片上加工制作而成。目前国内主要是华为跟一数科技采用这种方案。
优点 :在整体反射模式下,光利用效率高,画面更加自然。价格可控,CMOS技术由多家厂商掌握,避免DMD芯片只由德州仪器独家垄断的情况。反光层和硅基板电路之间具有一层金属遮光层,可以有效防止阳光倒灌。
缺点 :目前整体技术还不太成熟,没有大规模量产,有待进一步发展。HUD可视区域较小,投影光机体积相对较大。

8.ARHUD主要技术难点
- 市场角小
目前市面上的ARHUD设备FOV过小,影像只能呈现在驾驶者视线范围中的一小部分。
- 投影亮度
HUD影像的亮度,为了对应不同的外部光线、气候等影响,需要更高的亮度来达到较佳的影像品质与视觉效果。
- 硬件体积
降低HUD的系统整体体积,现有TFT/DLP等模组本身的限制,加上需求较大的FOV,都会让HUD系统的体积越来越大,与车体的空间分配冲突。
- 实景贴合
需要通过各种路网数据、传感器数据、GPS信号等,进行实时矫正。确保AR的图形和真实路况匹配。
- 人眼位置
如何动态监测人眼位置,调整ARHUD投射的画面,使之避免出现画面发虚、错位等问题,比较考验HUD厂商的能力。
结语
ARHUD技术发展至今,已成为驾车导航产业必争之地。可以预期的是,苹果公司的ARHUD在未来也会逐渐向驾车导航靠拢。当然,还有很多技术难点需要攻克,来提升用户体验,真正实现 导航视野内“所见即所得”。值得欣慰的是,在ARHUD技术迅猛发展过程中,见到了很多国内企业努力的身影。希望未来有更多中国技术在ARHUD领域大放异彩!
注:文中部分配图来自网络,如有侵权,请联系我们删除。
ARHUD驾车导航技术概览的更多相关文章
- Windows Phone 8.1 开发技术概览 (Universal APP)
前一阵真的比较懒 WP8.1 已经出来这么长时间了现在才更新BLOG让大家久等了,今天我先为大家介绍下 WP 8.1的开发框架,什么是微软所推崇的 Universal APP,以及我们要开发 Univ ...
- 【转】Intel RealSense(实感技术)概览
Intel RealSense(实感技术)概览 1 Reply 版权声明:本文系本站作者自己翻译整理,欢迎转载,但转载请以超链接形式注明文章来源(planckscale.info).作者信息和本声明, ...
- BizTalk 开发系列(三十九) BizTalk Server 2009技术概览
BizTalk Server 2009已经发布一段时间了,之前Beta版发布的时候也写过一篇文章<BizTalk Server 2009 Beta初体验>, 当时比较了2006 R2与20 ...
- Java SE技术概览 - Jave SE Platform at a Glance
从学习到工作,使用Java有几年时间,一直没有好好端详一下她的“内涵”.无意中看到一个关于Java SE的概览图,发现Java中提供的API还挺系统全面,把她放到博客中,相信对于想系统了解Java技术 ...
- 转:Linux网络IO并行化技术概览
转:http://codinginet.com/articles/view/201605-linux_net_parallel?simple=1&from=timeline&isapp ...
- 【百度地图API】让用户选择起点和终点的驾车导航
原文:[百度地图API]让用户选择起点和终点的驾车导航 摘要: 如果用户搜索“从机场到火车站”,使用驾车导航DrivingRoute会默认显示一条结果.但同一个城市可能有多个机场和火车站,那么,如何用 ...
- 【百度地图API】圣诞节里不会迷路的麋鹿——驾车导航
原文:[百度地图API]圣诞节里不会迷路的麋鹿--驾车导航 任务描述: 可能大家还不知道,圣诞老人是爱迷路的老爷爷! 今年圣诞节又要到了,圣诞老人又要出来送礼物了.可是,他灰常的迷路呢! 还好,他有一 ...
- 前端可视化建模技术概览,包括:GoJS
我推荐使用的: 库 网址 备注 GoJS https://gojs.net/latest/samples/flowchart.html 推荐使用 相关文章: 前端可视化建模技术概览:http://le ...
- Spring Cloud(一):服务治理技术概览【Finchley 版】
Spring Cloud(一):服务治理技术概览[Finchley 版] 发表于 2018-04-14 | 更新于 2018-05-07 | Spring Cloud Netflix 是 Spr ...
- Spring Cloud微服务技术概览
Spring Cloud 是一系列框架的有序集合.它利用 Spring Boot 的开发便利性巧妙地简化了分布式系统基础设施的开发,如服务发现注册.配置中心.消息总线.负载均衡.断路器.数据监控等,都 ...
随机推荐
- window远程桌面之通过修改端口链接
windows开启及连接远程桌面 技术标签: 后端开发 windows 桌面 -> 此电脑 图标右键 -> 属性 远程设置 远程桌面 -> 修改为允许远程连接到 ...
- [大数据]Hadoop简述
1 Hadoop:发展沿革 摘要:1个人(Doug Cutting).2个公司(Google.Cloudera) 1.1 渊源 Hadoop项目 最初开发者/创始者: Doug Cutting(道格· ...
- 五月九号java基础知识点
1.哈希集合元素不按顺序排序,若要排序使用LinkedHashSet类2.树集合类不仅实现Set接口,还实现java.lang.SortedSet接口来实现排序操作3.TreeSet<Strin ...
- InnoDB引擎之flush脏页
利用 WAL 技术,数据库将随机写转换成了顺序写,大大提升了数据库的性能,由此也带来了内存脏页的问题. 脏页会被后台线程自动 flush,也会由于数据页淘汰而触发 flush,而刷脏页的过程由于会占用 ...
- 【LeetCode回溯算法#extra01】集合划分问题【火柴拼正方形、划分k个相等子集、公平发饼干】
火柴拼正方形 https://leetcode.cn/problems/matchsticks-to-square/ 你将得到一个整数数组 matchsticks ,其中 matchsticks[i] ...
- Python程序笔记20230301
打印九九乘法表 for i in range(1, 10): for j in range(1, i+1): print(i, "x", j, "=", i * ...
- redis 基于 漏斗算法 实现对 api 的限流
漏斗算法 漏桶算法的原理: 漏桶有一定的容量,给漏桶注水,当单位时间内注入水量大于流出水量,漏桶内积累的水就会越来越多,直到溢出. 就好比大批量请求访问nginx相当于注水,nginx根据配置按照固定 ...
- Vite-Admin后台管理系统|vite4+vue3+pinia前端后台框架实例
基于vite4.x+vue3+pinia前端后台管理系统解决方案ViteAdmin. 前段时间分享了一篇vue3自研pc端UI组件库VEPlus.这次带来最新开发的基于vite4+vue3+pinia ...
- 让SQL起飞(优化)
最近博主看完了<SQL进阶教程>这本书,看完后给博主打开了SQL世界的新大门,对于 SQL 的理解不在局限于以前的常规用法.借用其他读者的评论, ❝ 读完醍醐灌顶,对SQL做到了知其然更能 ...
- CentOS7---部署Tomcat和安装Jpress
总览需求 1. 简述静态网页和动态网页的区别. 2. 简述 Webl.0 和 Web2.0 的区别. 3. 安装tomcat8,配置服务启动脚本,部署jpress应用. 1.简述静态网页和动态网页的区 ...