相机标定 matlab opencv ROS三种方法标定步骤(1)
一 、 理解摄像机模型,网上有很多讲解的十分详细,在这里我只是记录我的整合出来的资料和我的部分理解
计算机视觉领域中常见的三个坐标系:图像坐标系,相机坐标系,世界坐标系,实际上就是要用矩阵来表
示各个坐标系下的转换,首先在图像坐标系下与相机坐标系的关系
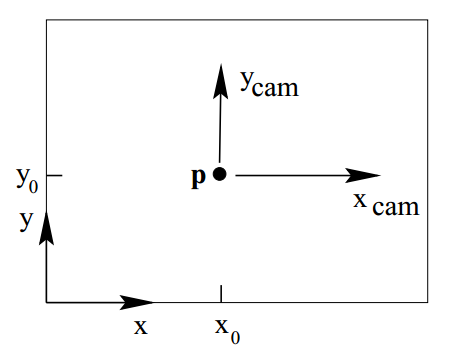
可得出 Xcam=x/dx+x0, Ycam=y/dy+y0 表示为矩阵形式
Xcam 1/dx 0 x0 x
Ycam = 0 1/dy y0 * y
1 0 0 1 1
相机坐标系与图像坐标系的关系是
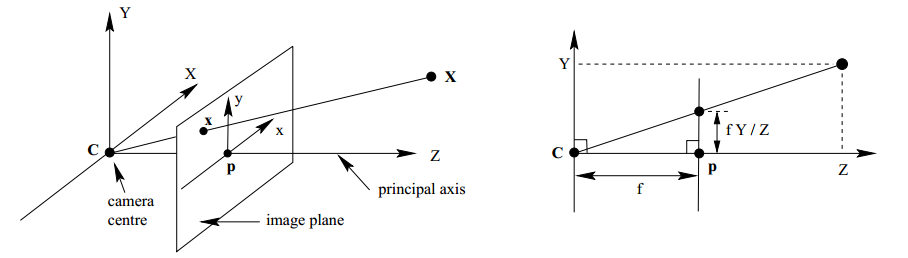
既有 可以写成
可以写成 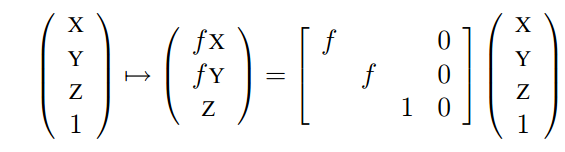
我们知道相机坐标系与世界坐标系的关系是
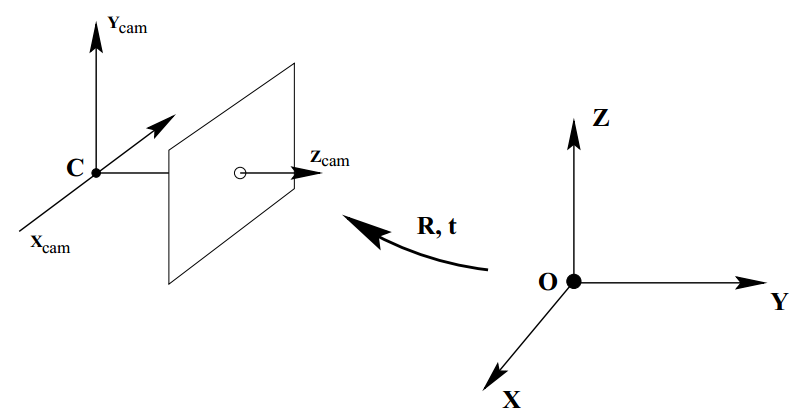 表达成矩阵表示为
表达成矩阵表示为
 可以推导出
可以推导出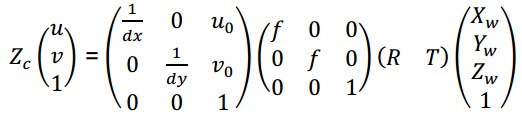
(这里面的Xc ,Yc,Zc 也就是上面的X Y Z )其中
K= 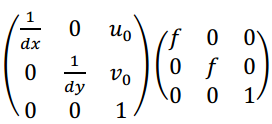 就为相机的内参 R T 为相机的外参(好难编辑)
就为相机的内参 R T 为相机的外参(好难编辑)
接下来就是说明一下使用MATLAB Opencv ,以及ROS环境下的Opencv进行相机校准
相机的标定主要有两种方法 :摄像头标定方法和摄像头自标定方法,典型的有:(1)Tsai(传统的标定方法) (2)张正友(介于传统与自标定方法之间)张正友标定法由于很简单
所以得到广泛 的应用,张正友标定法的步骤:
1、打印一张模板并贴在一个平面上;
2、从不同角度拍摄若干张模板图像;
3、检测出图像中的特征点;
4、求出摄像机的外参数(单应性矩阵)和内参数(最大似然估计) ;
5、求出畸变系数;
6、优化求精。
二、对于在matlab中进行相机标定是一件非常简单的事,因为在matlab官方网站,以及matlab中文论坛上都是有教程的,只需要找到标定模板就可以了,
matlab中文论坛的学习网址 http://www.ilovematlab.cn/thread-267670-1-1.html
详细相机标定过程请参考 http://www.mathworks.com/help/vi ... ator.html#btxr8c_-2
MATLAB相机标定教学视频 http://www.mathworks.com/videos/ ... h-matlab-81233.html
2.1 首先我们得准备软件matlab,安装matlab就按照网上的教程既可以安装成功了,不过安装过程可能遇到一些软件破解的一些问题,如果安装不上,
那就果断的换安装的软件版本, 其次就是准备标定魔板,我是直 接用A3的纸打印了标准的棋盘方格,自己百度一下标定棋盘网上有很多图纸可供下载,
http://wiki.ros.org/camera_calibration/Tutorials/MonocularCalibration?action=AttachFile&do=view&target=check-108.pdf
我使用的就是check-108,其中108代表的是每个小方格的边长为108mm,使用A3的纸张打印,后来测量一下每个黑白方格的边长为35mm,
2.2 材料和软件都准备好了,我们在准备摄像头,我们有四个选择:(1)手机拍照 我们就标定手机的摄像头,(2)笔记本自带的摄像头,(3)使用带USB的的摄像头(4)网上提供的模板
2.2.1 手机摄像头标定,最好的方法是将手机固定,然后移动标定模板,改变模板的远近位置,以及翻转角度等等,如下图
这里面是我把标定模板给固定,改变手机的位置,这就导致拍出来的照骗有些事不能用的(可以试试),就会明白为什么会不能进行标定了,
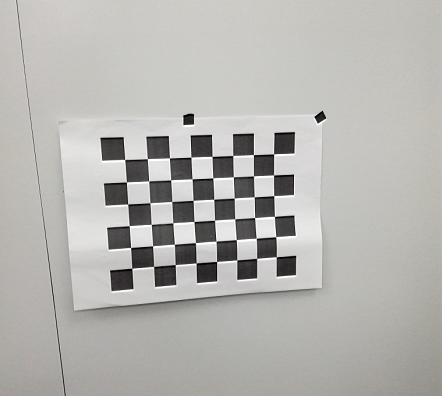
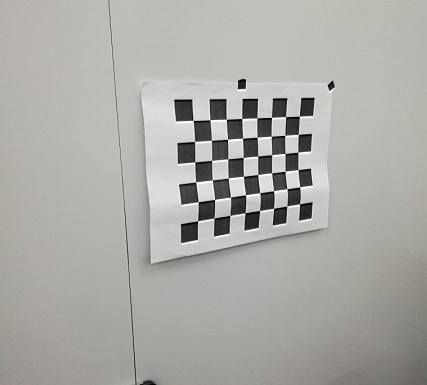
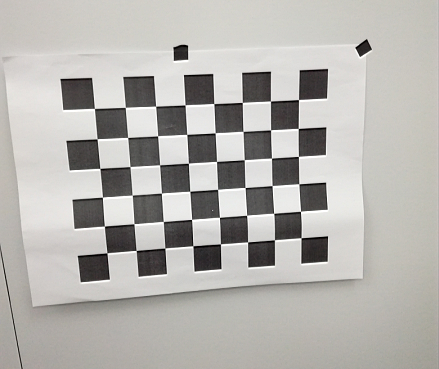
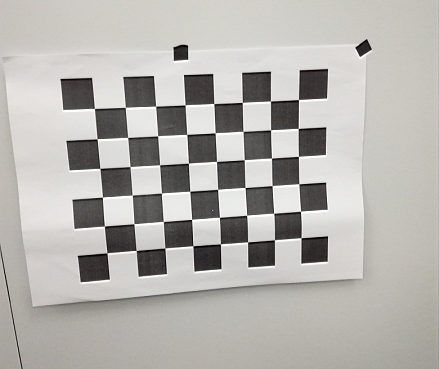
这只是展示其中四张照片,当然拍下来的至少要20张不一样的照片,现在开始使用MATLAB进行标定了,
2.2.2当我们想标定笔记本的摄像头或者我自己外界一个摄像头的时候,就需要使用一个软件去获取摄像头的照骗,使用 Ecap软件就可以打开摄像头,并且捕捉照骗
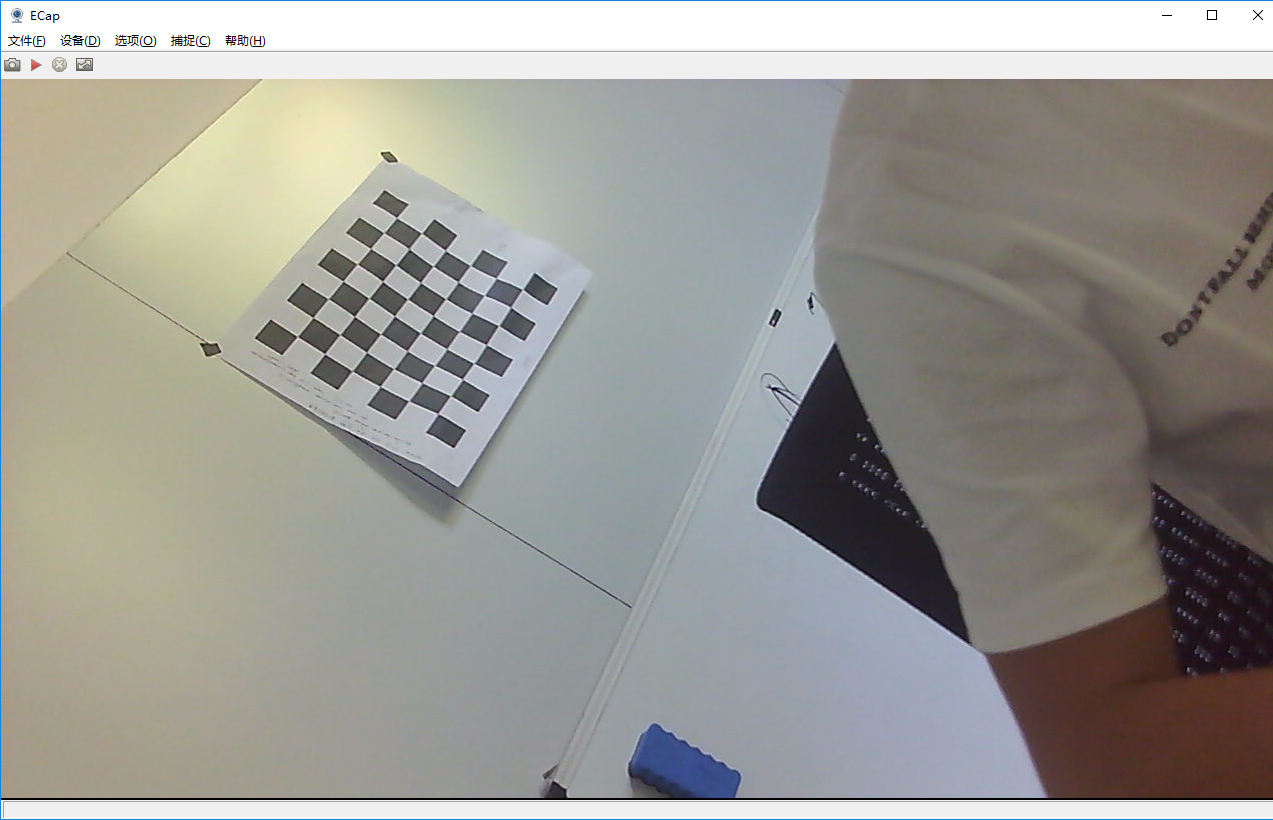
可以捕获很多不同角度的关于标定模板的图片,至少需要20张,紧接着打开matlab,在命令行输入
>> cameraCalibrator 出现:

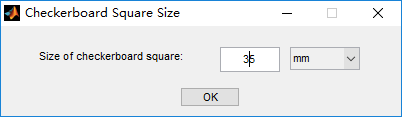
之后可以添加“add images”,然后选择我的模板的方格大小,默认是25mm 改为与实际模板一致的边长是35mm
也可以直接添加网上所提供的标定模板,

添加完选择“”calibrate“”有
右边出现一下统计图,左下角就是每个图片相对摄像头的远近和角度,点击保存calibration.mat文件,点击“Export camera parameters”出现标定的结果
到此MATLAB的相机标定就完成了
(虽然我写的很幸苦,但是我也只是想记录下我的实验过程,中间也遇到很多问题,这都是解决后的结果本来是1,2,3放在一起的
但是因为篇幅太长,只好将其分为三段,中间也丢失过好几次,然后又重新写,大神们看见就当是在看笑话,一笑了之即可,
我知道这其中没有什么创新可言,真实惭愧,谢谢)
相机标定 matlab opencv ROS三种方法标定步骤(1)的更多相关文章
- 相机标定 matlab opencv ROS三种方法标定步骤(2)
二 ubuntu下Opencv的相机标定 一般直接用Opencv的源码就可以进行相机的标定,但是可能只是会实现结果,却不懂实现的过程,我也是模模糊糊的看了<计算机视觉中的多视图几何>以及 ...
- 相机标定 matlab opencv ROS三种方法标定步骤(3)
三 , ROS 环境下 如何进行相机标定 刚开始做到的时候遇到一些问题没有记录下来,现在回头写的时候都是没有错误的结果了,首先使用ROS标定相机, 要知道如何查看节点之间的流程图 rosrun r ...
- matlab多行注释的三种方法
转自:http://icictech.blog.163.com/blog/static/2797425420084595725499/ 1)方法一 选中你要加注释的内容,然后选择工具菜单"t ...
- 用matlab脚本语言写M文件函数时用三种方法简单实现实现DFT(离散傅里叶变换)
%用二重循环实现DFT: function xk=dt_0(xn); %define a function N=length(xn); %caculate the length of the vari ...
- Matlab中数组元素引用——三种方法
Matlab中数组元素引用——三种方法 1.Matlab中数组元素引用有三种方法 1 2 3 1.下标法(subscripts) 2.索引法(index) 3.布尔法(Boolean) 注意:在使 ...
- MATLAB中多行注释的三种方法
MATLAB中多行注释的三种方法 A. %{ 若干语句 %} B. 多行注释: 选中要注释的若干语句, 编辑器菜单Text->Comment, 或者快捷键Ctrl+R 取消注释: 选中要取消注释 ...
- opencv 3.1.0 访问像素值的三种方法(C++)
三种方法分别问: 指针访问:void colorReduce_ptr(cv::Mat &inputImage, cv::Mat &outputImage, int div); 迭代器访 ...
- opencv图像阈值设置的三种方法
1.简单阈值设置 像素值高于阈值时,给这个像素赋予一个新值(可能是白色),否则我们给它赋予另外一种颜色(也许是黑色).这个函数就是 cv2.threshhold().这个函数的第一个参数就是原图像 ...
- 【Android】Eclipse自动编译NDK/JNI的三种方法
[Android]Eclipse自动编译NDK/JNI的三种方法 SkySeraph Sep. 18th 2014 Email:skyseraph00@163.com 更多精彩请直接访问SkySer ...
随机推荐
- Day2:T3DP(基于排列组合思想)
T3:DP(基于排列组合思想的状态转移) 其实之前写排列组合的题目有一种很茫然的感觉.... 应该是因为之前没有刷过所以没有什么体会 上次刷的vj1060有用到,但是写状态转移还是第一次学习吧 ccy ...
- Asp.net MVC集成Google Calendar API(附Demo源码)
Asp.net MVC集成Google Calendar API(附Demo源码) Google Calendar是非常方便的日程管理应用,很多人都非常熟悉.Google的应用在国内不稳定,但是在国外 ...
- start running 开始跑步减肥
begin 两个月前,逛超市的时候站在体重秤上称了称,一直以为自己体重很正常(BMI<25,虽然也不轻~~~),结果直接迈过超重,奔着肥胖跑去了(BMI>30,BMI计算器 http:// ...
- Weka开发[3]-Evaluation类
上一次最后的结果就是一个分类的值,可能让大家大失所望,这一次会给大家一个比较完美的答案,这就是Evaluation类,这次只讲一下最简单的用法,首先初始化一个Evaluation对象,Evaluati ...
- this关键字、访问修饰符、super关键字
this关键字.访问修饰符.super关键字 Java关键字this只能用于方法方法体内,而且只能用在非静态方法内.当一个对象创建后,Java虚拟机(JVM)就会给这个对象分配一个引用自身的指针,这个 ...
- 一步一步深入spring(3)--spring的依赖注入方式
对于spring配置一个bean时,如果需要给该bean提供一些初始化参数,则需要通过依赖注入方式,所谓的依赖注入就是通过spring将bean所需要的一些参数传递到bean实例对象的过程,sprin ...
- Pyscripter是python下一个非常流行的开源IDE
Pyscripter 不能正确调用另一文件中模块的问题的解析(Internal Engine 和 Remote Engine) 背景 Pyscripter是python下一个非常流行的开源IDE,笔者 ...
- squid和varnish的小结
squid和varnish的小结 http://blog.haohtml.com/ 上周初步接触linux下的这2个反向缓存软件,都实验了一下,貌似squid还是比较顺利的,varnish则碰 ...
- linux 高精度定时器例子
//author:DriverMonkey //phone:13410905075 //mail:bookworepeng@Hotmail.com //qq:196568501 #include &l ...
- sqlserver2000 数据库分页查询[根据网上搜索到得sql修改,亲测,可用]
SELECT TOP 页大小 * FROM TestTable WHERE (ID > (SELECT case when count(0) < 页大小 then 0 else MAX(i ...