玩转X-CTR100 l STM32F4 l CAN通信

我造轮子,你造车,创客一起造起来!塔克创新资讯【塔克社区 www.xtark.cn 】【塔克博客 www.cnblogs.com/xtark/ 】
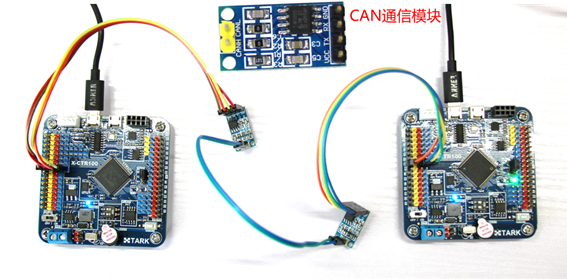
X-CTR100控制器STM32F4处理器内置CAN控制器,实现CAN通信功能,需要外扩CAN接口模块,本例程使用NXP的JTA1050模块。
原理
CAN 是Controller Area Network 的缩写(以下称为CAN),是ISO国际标准化的串行通信协议。在汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种各样的电子控制系统被开发了出来。由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。为适应"减少线束的数量"、"通过多个LAN,进行大量数据的高速通信"的需要,1986 年德国电气商博世公司开发出面向汽车的CAN 通信协议。此后,CAN 通过ISO11898 及ISO11519 进行了标准化,在欧洲已是汽车网络的标准协议。
CAN 的高性能和可靠性已被认同,并被广泛地应用于工业自动化、船舶、医疗设备、工业设备等方面。现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的计算机局域网。它的出现为分布式控制系统实现各节点之间实时、可靠的数据通信提供了强有力的技术支持。关于CAN协议详细介绍,请参考资料文件夹相关文档。
X-CTR100控制器STM32F4处理器内置CAN控制器,支持 CAN 协议 2.0A 和 2.0B,特性如下。
- 支持 CAN 协议 2.0A 和 2.0B 主动模式
- 波特率 最高达 1Mbps 1Mbps
- 支持时间触发通信
- 具有 3个发送邮箱 个发送邮箱
- 具有 3级深度的 级深度的 2个接收 个接收 FIFO
- 可变的过滤器组( 28 个)
STM42F4内部CAN框图。

使用CAN功能,需要增加CAN通信接口芯片,本文使用TJA1050,该芯片兼容PCA82C250。
例程
使用CAN接口模块TJA1050进行CAN通信操作,实现了数据循环发送和数据接收显示功能,可通过2块X-CTR100控制器通信,或者使用1块X-CTR100和CAN分析仪通信,本例程以2套X-CTR100通信为例进行说明。
硬件说明
硬件资源:
- 串口UART1
- LED灯
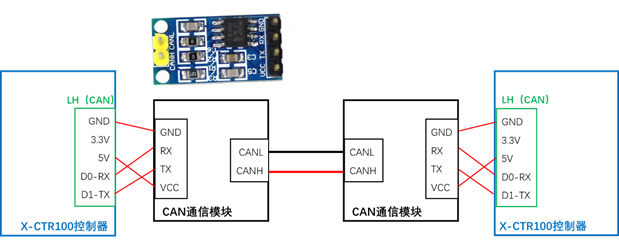
- CAN扩展接口(LH)
- CAN接口模块TJA1050(需自备)
连接关系如图所示
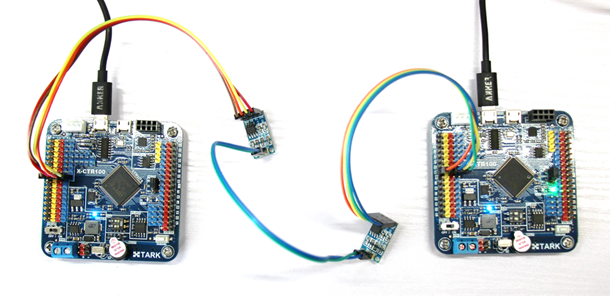
连接实物图
软件生态
X-SOFT软件生态,X-API扩展文件如下。
ax_can.c—— CAN通信源文件
ax_can.h——CAN通信接口头文件
接口函数
|
void AX_CAN1_Init(uint8_t tsjw,uint8_t tbs2,uint8_t tbs1,uint16_t brp,uint8_t mode); //CAN1初始化 uint8_t AX_CAN1_SendMsg(uint8_t* msg,uint8_t num); //CAN1发送数据 uint8_t AX_CAN1_ReceiveMsg(uint8_t *msg); //CAN1接收数据 |
特殊说明,1.8固件 PLL_N 默认为360,通信时频率错误,之前固件版本为336,改为336后,通信正常。
修改位置为,system_stm32f4xx.c,400行位置。
|
#if defined (STM32F40_41xxx) #define PLL_N 336 //360 /* SYSCLK = PLL_VCO / PLL_P */ #define PLL_P 2 #endif /* STM32F40_41xxx */ |
例程代码主要包括两部分,主程序负责数据定时发送,CAN接收中断负责数据接收和显示。
CAN1接收中断程序代码如下。
|
//中断服务函数 void CAN1_RX0_IRQHandler(void) { CanRxMsg RxMessage; uint8_t i=0;
CAN_Receive(CAN1, 0, &RxMessage);
printf("RX:");
for(i=0;i<8;i++) printf("%d ",RxMessage.Data[i]);
printf("\r\n");
} |
软件说明
主程序代码如下。
|
int main(void) { u8 i=0; u8 canbuf[8]; u8 res;
//XRT1初始化 AX_Init(115200); printf("***X-CTR100 CAN通信例程***\r\n\r\n");
//CAN初始化,正常模式,波特率500Kbps AX_CAN1_Init(CAN_SJW_1tq,CAN_BS2_6tq,CAN_BS1_7tq,6,CAN_Mode_Normal);
//设置CAN接收中断 NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统中断优先级分组2 NVIC_Config();
//初始化发送数据 for(i=0;i<8;i++) { canbuf[i] = 0; //填充发送缓冲区 }
while (1) { canbuf[0]++;
个字节
AX_Delayms(100); AX_LEDG_Toggle(); } } |
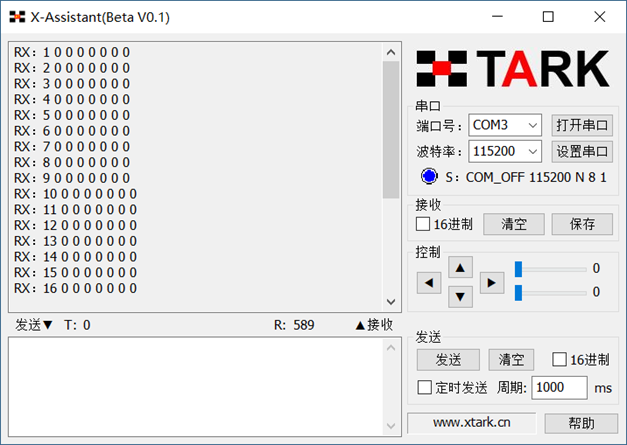
为了显示每帧数据差异,发送的第一个字节进行加1操作。
实现效果
两个X-CTR100控制器互相发送接收,打开串口助手即可查看接收的数据。
玩转X-CTR100 l STM32F4 l CAN通信的更多相关文章
- 玩转X-CTR100 l STM32F4 l ADC 模拟数字转换
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 AD转换接 ...
- 玩转X-CTR100 l STM32F4 l MPU6050加速度陀螺仪传感器
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 板载加速度 ...
- 玩转X-CTR100 l STM32F4 l X-CTR100与树莓派搭建机器人平台
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器与树莓派Linux系统 ...
- 玩转X-CTR100 l STM32F4 l 舵机控制
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器的舵机控制,X-CTR ...
- 玩转X-CTR100 l STM32F4 l DRV8825 A4988 步进电机控制
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器控制步进电机 ...
- 玩转X-CTR100 l STM32F4 l 基础例程printf、LED、蜂鸣器、拨码开关、位带操作
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器基础板载资源 ...
- 玩转X-CTR100 l STM32F4 l PS2无线手柄
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] SONY的PS2无线手柄是索尼游戏机的遥控手柄,控制 ...
- 玩转X-CTR100 l STM32F4 l DSP指令集性能测试
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 DSP库的 ...
- 玩转X-CTR100 l STM32F4 l FPU单精度浮点性能测试
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器如何开启ST ...
- 玩转X-CTR100 l STM32F4 l RNG硬件随机数发生器
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 STM32F4硬件随 ...
随机推荐
- HDU1560 DNA sequence(IDA*)题解
DNA sequence Time Limit: 15000/5000 MS (Java/Others) Memory Limit: 32768/32768 K (Java/Others) To ...
- Linux——文件处理命令简单学习总结
linux中一共有三种用户: 1: 所有者u(User) 2: 所属组g(group) 3: 其他用户o(other) linux中权限一共分三种: 1: r read 读权限 2: w write ...
- Jmeter 中多线程并发和循环控制器
今天遇到一个场景, 给一个手机号发送短信验证码,通过正确输入短信验证码即登录并获得token,进行其他操作. 短信验证码是4位,即9999个组合, 接口没有对验证次数做校验,所以可以一直一直尝试通过验 ...
- Hibernate HQL查询 插入 更新(update)实例
1.实体查询:有关实体查询技术,其实我们在先前已经有多次涉及,比如下面的例子:String hql=”from User user ”;List list=session.CreateQuery(hq ...
- STL_容器使用时机
1. 来自教程: ◆ Vector的使用场景:比如软件历史操作记录的存储,我们经常要查看历史记录,比如上一次的记录,上上次的记录,但却不会去删除记录,因为记录是事实的描述. ◆ deque的使用场景: ...
- [原][OSG][osgBullet][osgworks][bullet]编译osgBullet尝试物理引擎
相关网址: 类似文章:http://blog.csdn.net/lh1162810317/article/details/17475297 osgBullet官网:http://osgbullet.v ...
- 使用自定义RadioButton和ViewPager实现TabHost效果和带滑动的页卡效果
在工作中又很多需求都不是android系统自带的控件可以达到效果的,内置的TabHost就是,只能达到简单的效果 ,所以这个时候就要自定义控件来达到效果:这个效果就是: 使用自定义RadioButto ...
- webpack 集成 jQuery 和 Avalon
webpack 系列 三:webpack 如何集成第三方js库 webpack系列目录 webpack 系列 一:模块系统的演进 webpack 系列 二:webpack 介绍&安装 webp ...
- javascript对象使用总结
javascript对象使用总结 一.总结 一句话总结:js对象的主要知识点是创建对象和继承,并且创建对象和继承的方法都是逐步层层递进的 创建对象 继承 原型 创建对象 1 <script> ...
- [Java学习] Java虚拟机(JVM)以及跨平台原理
相信大家已经了解到Java具有跨平台的特性,可以“一次编译,到处运行”,在Windows下编写的程序,无需任何修改就可以在Linux下运行,这是C和C++很难做到的. 那么,跨平台是怎样实现的呢?这就 ...