【TencentOS tiny】深度源码分析(3)——队列
队列基本概念
队列是一种常用于任务间通信的数据结构,队列可以在任务与任务间、中断和任务间传递消息,实现了任务接收来自其他任务或中断的不固定长度的消息,任务能够从队列里面读取消息,当队列中的消息是空时,读取消息的任务将被阻塞,用户还可以指定任务等待消息的时间timeout,在这段时间中,如果队列为空,该任务将保持阻塞状态以等待队列数据有效。当队列中有新消息时,被阻塞的任务会被唤醒并处理新消息;当等待的时间超过了指定的阻塞时间,即使队列中尚无有效数据,任务也会自动从阻塞态转为就绪态,消息队列是一种异步的通信方式。
通过队列服务,任务或中断服务例程可以将一条或多条消息放入队列中。同样,一个或多个任务可以从队列中获得消息。当有多个消息发送到队列时,通常是将先进入队列的消息先传给任务,也就是说,任务先得到的是最先进入队列的消息,即先进先出原则(FIFO),其实TencentOS tiny暂时不支持后进先出原则LIFO操作队列,但是支持后进先出操作消息队列。
提示:
TencentOS tiny的队列不等同于消息队列,虽然队列的底层实现是依赖消息队列,但在TencentOS tiny中将它们分离开,这是两个概念,毕竟操作是不一样的。
队列的阻塞机制
举个简单的例子来理解操作系统中的阻塞机制:
假设你某天去餐厅吃饭,但是餐厅没菜了,那么你可能会有3个选择,你扭头就走,既然都没菜了,肯定换一家餐厅啊是吧。或者你会选择等一下,说不定老板去买菜了,一会就有菜了呢,就能吃饭。又或者,你觉得这家餐厅非常好吃,吃不到饭你就不走了,在这死等~
同样的:假设有一个任务A对某个队列进行读操作的时候(出队),发现它此时是没有消息的,那么此时任务A有3个选择:第一个选择,任务A扭头就走,既然队列没有消息,那我也不等了,干其它事情去,这样子任务A不会进入阻塞态;第二个选择,任务A还是在这里等等吧,可能过一会队列就有消息,此时任务A会进入阻塞状态,在等待着消息的到来,而任务A的等待时间就由我们自己指定,当阻塞的这段时间中任务A等到了队列的消息,那么任务A就会从阻塞态变成就绪态;假如等待超时了,队列还没消息,那任务A就不等了,从阻塞态中唤醒;第三个选择,任务A死等,不等到消息就不走了,这样子任务A就会进入阻塞态,直到完成读取队列的消息。
队列实现的数据结构
队列控制块
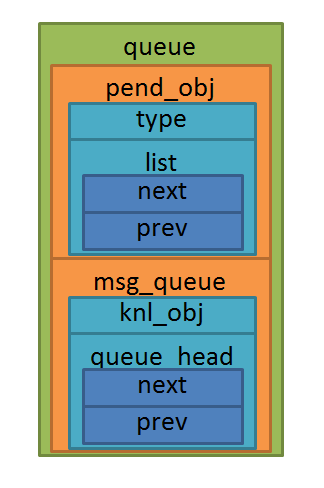
TencentOS tiny 通过队列控制块操作队列,其数据类型为k_queue_t,队列控制块由多个元素组成,主要有 pend_obj_t 类型的pend_obj以及k_msg_queue_t 类型的msg_queue消息列表。其实整个队列的实现非常简单,主要靠msg_queue中的queue_head成员变量(这其实是一个消息列表(消息链表)),所有的消息都会被记录在这个消息列表中,当读取消息的时候,会从消息列表读取消息。
继承自内核对象的数据结构 在 \kernel\core\include\tos_pend.h 的 35 行
typedef struct pend_object_st {
pend_type_t type;
k_list_t list;
} pend_obj_t;
消息列表的数据类型(消息队列控制块),在 \kernel\core\include\tos_msg.h 文件的第 13 行
typedef struct k_msg_queue_st {
#if TOS_CFG_OBJECT_VERIFY_EN > 0u
knl_obj_t knl_obj;
#endif
k_list_t queue_head;
} k_msg_queue_t;
队列控制块,在 \kernel\core\include\tos_queue.h 文件的第 6 行
typedef struct k_queue_st {
pend_obj_t pend_obj;
k_msg_queue_t msg_queue;
} k_queue_t;
队列控制块示意图如下:
消息控制块
除了上述的队列控制块外,还有消息队列控制块,这是因为TencentOS tiny中实现队列是依赖消息队列的,既然队列可以传递数据(消息),则必须存在一种可以存储消息的数据结构,我称之为消息控制块,消息控制块中记录了消息的存储地址msg_addr,以及消息的大小msg_size,此外还存在一个list成员变量,可以将消息挂载到队列的消息列表中。
消息控制块数据结构, 在 \kernel\core\include\tos_msg.h 文件的第 7 行
typedef struct k_message_st {
k_list_t list;
void *msg_addr;
size_t msg_size;
} k_msg_t;

其实队列的实现依赖于消息队列,他们的关系如下:
任务控制块中的消息成员变量
假设任务A在队列中等待消息,而中断或其他任务往任务A等待的队列写入(发送)一个消息,那么这个消息不会被挂载到队列的消息列表中,而是会直接被记录在任务A的任务控制块中,表示任务A从队列中等待到这个消息,因此任务控制块必须存在一些成员变量用于记录消息相关信息(如消息地址、消息大小等):
任务控制块数据结构 在\kernel\core\include\tos_task.h文件的第 90 行
typedef struct k_task_st {
···
#if TOS_CFG_MSG_EN > 0u
void *msg_addr; /**< 保存接收到的消息地址 */
size_t msg_size; /**< 保存接收到的消息大小 */
#endif
···
} k_task_t;
与消息相关的宏定义
在tos_config.h文件中,使能队列组件的宏定义TOS_CFG_QUEUE_EN,使能消息队列组件宏定义TOS_CFG_MSG_EN,系统支持的消息池中消息个数宏定义TOS_CFG_MSG_POOL_SIZE。
#define TOS_CFG_QUEUE_EN 1u
#define TOS_CFG_MSG_EN 1u
#define TOS_CFG_MSG_POOL_SIZE 3u
消息池
在TencentOS tiny中定义了一个数组k_msg_pool[TOS_CFG_MSG_POOL_SIZE]作为消息池,它的数据类型是消息控制块类型k_msg_t,因为在使用消息队列的时候存取消息比较频繁,而在系统初始化的时候就将这个大数组的各个元素串初始化,并挂载到空闲消息列表中k_msg_freelist,组成我们说的消息池k_msg_pool,而池中的成员变量就是我们所说的消息。
为什么使用池化的方式处理消息呢,因为高效,复用率高,就像我们在池塘中去一勺水,在使用完毕再将其归还到池塘,这种操作是非常高效的,并且在有限资源的嵌入式中能将资源重复有效地利用起来。
消息池相关的定义 在\kernel\core\tos_global.c文件 第 51 行
#if TOS_CFG_MSG_EN > 0u
TOS_LIST_DEFINE(k_msg_freelist);
k_msg_t k_msg_pool[TOS_CFG_MSG_POOL_SIZE];
#endif
队列创建
tos_queue_create()函数用于创建一个队列,队列就是一个数据结构,用于任务间的数据的传递。每创建一个新的队列都需要为其分配RAM,在创建的时候我们需要自己定义一个队列控制块,其内存是由编译器自动分配的。在创建的过程中实际上就是将队列控制块的内容进行初始化,将队列控制块的 pend_obj成员变量中的type 属性标识为PEND_TYPE_QUEUE,表示这是一个队列,然后调用消息队列中的API函数tos_msg_queue_create()将队列的消息成员变量msg_queue初始化,实际上就是初始化消息列表。
创建队列函数,在\kernel\core\tos_queue.c 第 5 行
__API__ k_err_t tos_queue_create(k_queue_t *queue)
{
TOS_PTR_SANITY_CHECK(queue);
pend_object_init(&queue->pend_obj, PEND_TYPE_QUEUE);
tos_msg_queue_create(&queue->msg_queue);
return K_ERR_NONE;
}
销毁队列
tos_queue_destroy()函数用于销毁一个队列,当队列不在使用是可以将其销毁,销毁的本质其实是将队列控制块的内容进行清除,首先判断一下队列控制块的类型是PEND_TYPE_QUEUE,这个函数只能销毁队列类型的控制块。然后判断是否有任务在等待队列中的消息,如果有则调用pend_wakeup_all()函数将这项任务唤醒,然后调用tos_msg_queue_flush()函数将队列的消息列表的消息全部“清空”,“清空”的意思是将挂载到队列上的消息释放回消息池(如果队列的消息列表存在消息,使用msgpool_free()函数释放消息),knl_object_deinit()函数是为了确保队列已经被销毁,此时队列控制块的pend_obj成员变量中的type 属性标识为KNL_OBJ_TYPE_NONE。最后在销毁队列后进行一次任务调度,以切换任务(毕竟刚刚很可能唤醒了任务)。
但是有一点要注意,因为队列控制块的RAM是由编译器静态分配的,所以即使是销毁了队列,这个内存也是没办法释放的~
销毁队列函数,在\kernel\core\tos_queue.c 第 14 行
__API__ k_err_t tos_queue_destroy(k_queue_t *queue)
{
TOS_CPU_CPSR_ALLOC();
TOS_PTR_SANITY_CHECK(queue);
#if TOS_CFG_OBJECT_VERIFY_EN > 0u
if (!pend_object_verify(&queue->pend_obj, PEND_TYPE_QUEUE)) {
return K_ERR_OBJ_INVALID;
}
#endif
TOS_CPU_INT_DISABLE();
if (!pend_is_nopending(&queue->pend_obj)) {
pend_wakeup_all(&queue->pend_obj, PEND_STATE_DESTROY);
}
pend_object_deinit(&queue->pend_obj);
tos_msg_queue_flush(&queue->msg_queue);
TOS_CPU_INT_ENABLE();
knl_sched();
return K_ERR_NONE;
}
清空队列
清空队列实际上就是将消息释放回消息池中,本质上还是调用tos_msg_queue_flush()函数。它是依赖于消息队列实现的。
清空队列函数,在\kernel\core\tos_queue.c 第 41 行
__API__ k_err_t tos_queue_flush(k_queue_t *queue)
{
TOS_CPU_CPSR_ALLOC();
TOS_PTR_SANITY_CHECK(queue);
#if TOS_CFG_OBJECT_VERIFY_EN > 0u
if (!pend_object_verify(&queue->pend_obj, PEND_TYPE_QUEUE)) {
return K_ERR_OBJ_INVALID;
}
#endif
TOS_CPU_INT_DISABLE();
tos_msg_queue_flush(&queue->msg_queue);
TOS_CPU_INT_ENABLE();
return K_ERR_NONE;
}
等待队列(消息)
当任务试图从队列中的获取消息时,用户可以指定一个等待时间,当且仅当队列存在消息的时候,任务才能获取到消息。在等待的这段时间中,如果队列为空,该任务将保持阻塞状态以等待队列消息有效。当其他任务或中断服务程序往其等待的队列中写入了数据,该任务将自动由阻塞态转为就绪态。当任务等待发生超时,即使队列中尚无有效消息,任务也会自动从阻塞态转为就绪态。
等待队列的过程也是非常简单的,先来看看参数吧(其中msg_addr与msg_size参数是用于保存函数返回的内容,即输出):
| 参数 | 说明 |
|---|---|
| queue | 队列控制块指针 |
| msg_addr | 用于保存获取到的消息(这是输出的) |
| msg_size | 用于保存获取到消息的大小(这是输出的) |
| timeout | 等待时间(以k_tick_t为单位) |
等待队列消息的过程如下:
首先检测传入的参数是否正确
尝试调用
tos_msg_queue_get()函数获取消息,如果队列存在消息则会获取成功(返回K_ERR_NONE),否则获取失败。(关于该函数在下一章讲解)当获取成功则可以直接退出函数,而当获取消息失败的时候,则可以根据指定的等待时间
timeout进行阻塞,如果不等待(timeout =TOS_TIME_NOWAIT),则直接返回错误代码K_ERR_PEND_NOWAIT。如果调度器被锁了
knl_is_sched_locked(),则无法进行等待操作,返回错误代码K_ERR_PEND_SCHED_LOCKED,毕竟需要切换任务,调度器被锁则无法切换任务。调用
pend_task_block()函数将任务阻塞,该函数实际上就是将任务从就绪列表中移除k_rdyq.task_list_head[task_prio],并且插入到等待列表中object->list,如果等待的时间不是永久等待TOS_TIME_FOREVER,还会将任务插入时间列表中k_tick_list,阻塞时间为timeout,然后进行一次任务调度knl_sched()。当程序能执行到
pend_state2errno()时,则表示任务等待到消息,又或者发生超时,那么就调用pend_state2errno()函数获取一下任务的等待状态,看一下是哪种情况导致任务恢复运行。如果是正常情况(等待获取到消息),则将消息从任务控制块的
k_curr_task->msg_addr读取出来,并且写入msg_addr中用于返回。同样的消息的大小也是会通过msg_size返回。
获取(等待)队列消息函数,在\kernel\core\tos_queue.c 第 60 行
__API__ k_err_t tos_queue_pend(k_queue_t *queue, void **msg_addr, size_t *msg_size, k_tick_t timeout)
{
TOS_CPU_CPSR_ALLOC();
k_err_t err;
TOS_PTR_SANITY_CHECK(queue);
TOS_PTR_SANITY_CHECK(msg_addr);
TOS_PTR_SANITY_CHECK(msg_size);
#if TOS_CFG_OBJECT_VERIFY_EN > 0u
if (!pend_object_verify(&queue->pend_obj, PEND_TYPE_QUEUE)) {
return K_ERR_OBJ_INVALID;
}
#endif
TOS_CPU_INT_DISABLE();
if (tos_msg_queue_get(&queue->msg_queue, msg_addr, msg_size) == K_ERR_NONE) {
TOS_CPU_INT_ENABLE();
return K_ERR_NONE;
}
if (timeout == TOS_TIME_NOWAIT) {
*msg_addr = K_NULL;
*msg_size = 0;
TOS_CPU_INT_ENABLE();
return K_ERR_PEND_NOWAIT;
}
if (knl_is_sched_locked()) {
TOS_CPU_INT_ENABLE();
return K_ERR_PEND_SCHED_LOCKED;
}
pend_task_block(k_curr_task, &queue->pend_obj, timeout);
TOS_CPU_INT_ENABLE();
knl_sched();
err = pend_state2errno(k_curr_task->pend_state);
if (err == K_ERR_NONE) {
*msg_addr = k_curr_task->msg_addr;
*msg_size = k_curr_task->msg_size;
k_curr_task->msg_addr = K_NULL;
k_curr_task->msg_size = 0;
}
return err;
}
将等待消息的任务添加到对应等待列表函数,在\kernel\core\tos_pend.c文件的 第 106 行
__KERNEL__ void pend_task_block(k_task_t *task, pend_obj_t *object, k_tick_t timeout)
{
readyqueue_remove(task);
pend_list_add(task, object);
if (timeout != TOS_TIME_FOREVER) {
tick_list_add(task, timeout);
}
}
获取任务等待状态的函数,在\kernel\core\tos_pend.c文件的 第 72 行
__KERNEL__ k_err_t pend_state2errno(pend_state_t state)
{
if (state == PEND_STATE_POST) {
return K_ERR_NONE;
} else if (state == PEND_STATE_TIMEOUT) {
return K_ERR_PEND_TIMEOUT;
} else if (state == PEND_STATE_DESTROY) {
return K_ERR_PEND_DESTROY;
} else if (state == PEND_STATE_OWNER_DIE) {
return K_ERR_PEND_OWNER_DIE;
} else {
return K_ERR_PEND_ABNORMAL;
}
}
(消息)写入队列
任务或者中断服务程序都可以给消息队列发送消息,当发送消息时,TencentOS tiny会从消息池中取出一个消息,挂载到队列的消息列表末尾(FIFO发送方式)。tos_queue_post()是唤醒一个等待队列消息任务,tos_queue_post_all()则会唤醒所有等待队列消息的任务,无论何种情况,都是调用queue_do_post将消息写入队列中。
消息的写入队列过程:
首先检测传入的参数是否正确
判断一下是否有任务在等待消息,如果有则根据
opt参数决定唤醒一个任务或者所有等待任务,否则直接将消息写入队列中。当没有任务在等待消息时,调用
tos_msg_queue_put()函数将消息写入队列,写入队列的方式遵循FIFO原则(TOS_OPT_MSG_PUT_FIFO),写入成功返回K_ERR_NONE。而如果消息池已经没有消息了(消息最大个数由TOS_CFG_MSG_POOL_SIZE宏定义决定),则写入失败,返回K_ERR_QUEUE_FULL错误代码。(关于该函数将在下一章讲解)如果有任务在等待消息,则调用
queue_task_msg_recv()函数将消息内容与大小写入任务控制块的msg_addr与msg_size成员变量中,此外还需要唤醒任务,就通过调用pend_task_wakeup()函数将对应的等待任务唤醒,核心处理思想就是通过TOS_LIST_FIRST_ENTRY获取到等待在队列上的任务,然后唤醒它。对于唤醒所有等待任务的处理其实也是一样的,只不过是多了个循环处理,把等待列表中的所有任务依次唤醒,仅此而已~
写入队列消息函数,在\kernel\core\tos_queue.c 第 159 、164 行
__API__ k_err_t tos_queue_post(k_queue_t *queue, void *msg_addr, size_t msg_size)
{
TOS_PTR_SANITY_CHECK(queue);
TOS_PTR_SANITY_CHECK(msg_addr);
return queue_do_post(queue, msg_addr, msg_size, OPT_POST_ONE);
}
__API__ k_err_t tos_queue_post_all(k_queue_t *queue, void *msg_addr, size_t msg_size)
{
TOS_PTR_SANITY_CHECK(queue);
TOS_PTR_SANITY_CHECK(msg_addr);
return queue_do_post(queue, msg_addr, msg_size, OPT_POST_ALL);
}
写入队列消息函数实际调用的函数,通过
opt参数进行不一样的处理,在\kernel\core\tos_queue.c 第 118 行
__STATIC__ k_err_t queue_do_post(k_queue_t *queue, void *msg_addr, size_t msg_size, opt_post_t opt)
{
TOS_CPU_CPSR_ALLOC();
k_list_t *curr, *next;
TOS_PTR_SANITY_CHECK(queue);
#if TOS_CFG_OBJECT_VERIFY_EN > 0u
if (!pend_object_verify(&queue->pend_obj, PEND_TYPE_QUEUE)) {
return K_ERR_OBJ_INVALID;
}
#endif
TOS_CPU_INT_DISABLE();
if (pend_is_nopending(&queue->pend_obj)) {
if (tos_msg_queue_put(&queue->msg_queue, msg_addr, msg_size, TOS_OPT_MSG_PUT_FIFO) != K_ERR_NONE) {
TOS_CPU_INT_ENABLE();
return K_ERR_QUEUE_FULL;
}
TOS_CPU_INT_ENABLE();
return K_ERR_NONE;
}
if (opt == OPT_POST_ONE) {
queue_task_msg_recv(TOS_LIST_FIRST_ENTRY(&queue->pend_obj.list, k_task_t, pend_list),
msg_addr, msg_size);
} else { // OPT_QUEUE_POST_ALL
TOS_LIST_FOR_EACH_SAFE(curr, next, &queue->pend_obj.list) {
queue_task_msg_recv(TOS_LIST_ENTRY(curr, k_task_t, pend_list),
msg_addr, msg_size);
}
}
TOS_CPU_INT_ENABLE();
knl_sched();
return K_ERR_NONE;
}
唤醒等待的任务函数,在\kernel\core\tos_pend.c文件 的第 87 行
唤醒等待任务的思想就是将任务从对应的等待列表移除,然后添加到就绪列表中。
__KERNEL__ void pend_task_wakeup(k_task_t *task, pend_state_t state)
{
if (task_state_is_pending(task)) {
// mark why we wakeup
task->pend_state = state;
pend_list_remove(task);
}
if (task_state_is_sleeping(task)) {
tick_list_remove(task);
}
if (task_state_is_suspended(task)) {
return;
}
readyqueue_add(task);
}
总结
代码精悍短小,思想清晰,非常建议深入学习~
喜欢就关注我吧!

更多资料欢迎关注“物联网IoT开发”公众号!
【TencentOS tiny】深度源码分析(3)——队列的更多相关文章
- [源码分析] 消息队列 Kombu 之 启动过程
[源码分析] 消息队列 Kombu 之 启动过程 0x00 摘要 本系列我们介绍消息队列 Kombu.Kombu 的定位是一个兼容 AMQP 协议的消息队列抽象.通过本文,大家可以了解 Kombu 是 ...
- [源码分析] 消息队列 Kombu 之 Consumer
[源码分析] 消息队列 Kombu 之 Consumer 目录 [源码分析] 消息队列 Kombu 之 Consumer 0x00 摘要 0x01 综述功能 0x02 示例代码 0x03 定义 3.1 ...
- [源码分析] 消息队列 Kombu 之 Producer
[源码分析] 消息队列 Kombu 之 Producer 目录 [源码分析] 消息队列 Kombu 之 Producer 0x00 摘要 0x01 示例代码 0x02 来由 0x03 建立 3.1 定 ...
- [源码分析] 消息队列 Kombu 之 Hub
[源码分析] 消息队列 Kombu 之 Hub 0x00 摘要 本系列我们介绍消息队列 Kombu.Kombu 的定位是一个兼容 AMQP 协议的消息队列抽象.通过本文,大家可以了解 Kombu 中的 ...
- [源码分析] 消息队列 Kombu 之 mailbox
[源码分析] 消息队列 Kombu 之 mailbox 0x00 摘要 本系列我们介绍消息队列 Kombu.Kombu 的定位是一个兼容 AMQP 协议的消息队列抽象.通过本文,大家可以了解 Komb ...
- 鸿蒙内核源码分析(消息队列篇) | 进程间如何异步传递大数据 | 百篇博客分析OpenHarmony源码 | v33.02
百篇博客系列篇.本篇为: v33.xx 鸿蒙内核源码分析(消息队列篇) | 进程间如何异步传递大数据 | 51.c.h .o 进程通讯相关篇为: v26.xx 鸿蒙内核源码分析(自旋锁篇) | 自旋锁 ...
- 【TencentOS tiny】深度源码分析(4)——消息队列
消息队列 在前一篇文章中[TencentOS tiny学习]源码分析(3)--队列 我们描述了TencentOS tiny的队列实现,同时也点出了TencentOS tiny的队列是依赖于消息队列的, ...
- Android源码分析-消息队列和Looper
转载请注明出处:http://blog.csdn.net/singwhatiwanna/article/details/17361775 前言 上周对Android中的事件派发机制进行了分析,这次博主 ...
- Log4j2异步情况下怎么防止丢日志的源码分析以及队列等待和拒绝策略分析
org.apache.logging.log4j.core.async.AsyncLoggerConfigDisruptor以下所有源码均在此类中首先我们看下log4j2异步队列的初始化 从这里面我们 ...
- jQuery 源码分析(十一) 队列模块 Queue详解
队列是常用的数据结构之一,只允许在表的前端(队头)进行删除操作(出队),在表的后端(队尾)进行插入操作(入队).特点是先进先出,最先插入的元素最先被删除. 在jQuery内部,队列模块为动画模块提供基 ...
随机推荐
- Scrum团队的最佳规模?
无论你在小型创业公司工作还是在大公司的新产品线工作,当团队人数越来越多时总会达到一个临界点.尽早识别这个临界点可以让您的团队避免进入低效阶段.每个产品都是不同的,团队合作也是如此.因此,拆分团队也需要 ...
- lambda表达式排序
lambda表达式排序简洁 1.给一个字符串数组: String[] atp = {"2016-06-28 08:00:00", "2017-12-05 19:17:32 ...
- springboot打包jar包后运行
我们知道,spring boot内嵌tomcat,打包成jar包以后,直接就可以运行. 我们也可以使用启动项里面的mian入口来运行程序. 运行jar包时,我们一般是java -jar xxx.jar ...
- Python的6种运算符(日记)
学习了许久的Python,我单独总结出了Python中比较常见的6种运算符,感觉略有不全,希望大伙可以一起讨论与研究Python! 一.算术运算符 加 减 - 乘 * 除 / 取余 % 取整 // 异 ...
- 基础知识:什么是SNMP
简单网络管理协议(SNMP) 是专门设计用于在 IP 网络管理网络节点(服务器.工作站.路由器.交换机及HUBS等)的一种标准协议,它是一种应用层协议. SNMP 使网络管理员能够管理网络效能,发现并 ...
- http响应
1.http响应 2.响应行常见状态码 200 :请求成功. 302 :请求重定向. 当访问网址A时,由于网址A服务器端的拦截器或者其他后端代码处理的原因,会被重定向到网址B. 304 :请求资源没有 ...
- ES6中的迭代器、Generator函数以及Generator函数的异步操作
最近在写RN相关的东西,其中涉及到了redux-saga ,saga的实现原理就是ES6中的Generator函数,而Generator函数又和迭代器有着密不可分的关系.所以本篇博客先学习总结了ite ...
- Falsk中的Request、Response
Flask 中的Response 1.HTTPResponse('helloword') "helloword" from flask import Flask # 实例化Flas ...
- [C++] 类的设计(2)——拷贝控制(1)
1.一个类通过定义五种特殊的成员函数来控制此类型对象的拷贝.移动.赋值和销毁:拷贝构造函数.拷贝赋值运算符.移动构造函数.移动赋值运算符和析构函数.(拷贝.移动.析构) 2.拷贝和移动构造函数定义 ...
- [C++] 头文件中的#ifndef,#define,#endif以及#pragma用法
想必很多人都看过“头文件中用到的 #ifndef/#define/#endif 来防止该头文件被重复引用”.但是是否能理解“被重复引用”是什么意思?头文件被重复引用了,会产生什么后果?是不是所有的头文 ...