opencv::分水岭图像分割
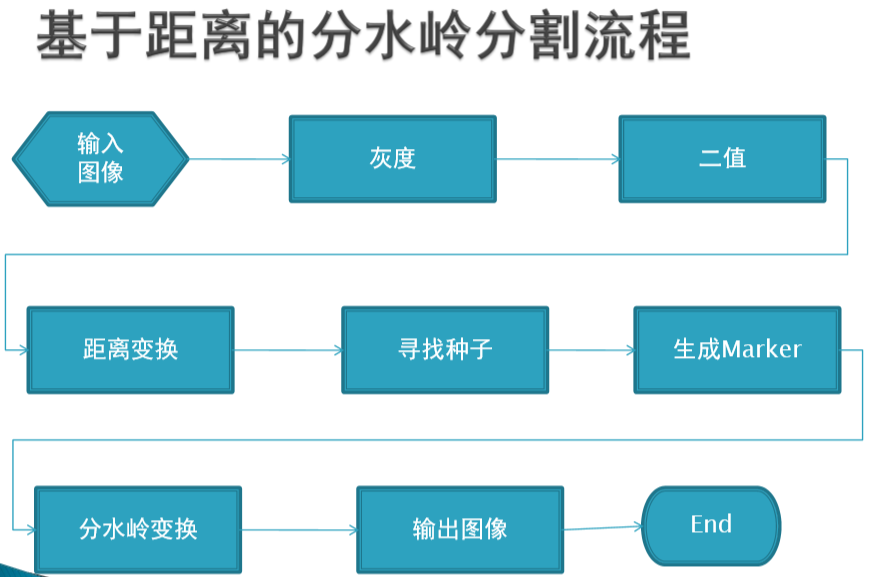
分水岭分割方法原理 (3种)
- 基于浸泡理论的分水岭分割方法 (距离)
- 基于连通图的方法
- 基于距离变换的方法 图像形态学操作:
- 腐蚀与膨胀
- 开闭操作 分水岭算法运用
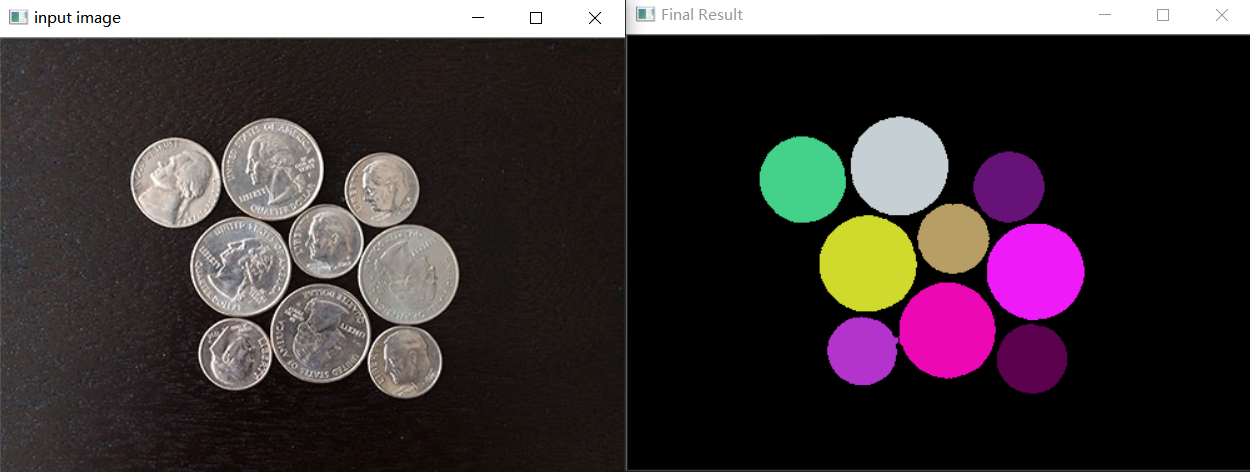
- 分割粘连对象,实现形态学操作与对象计数
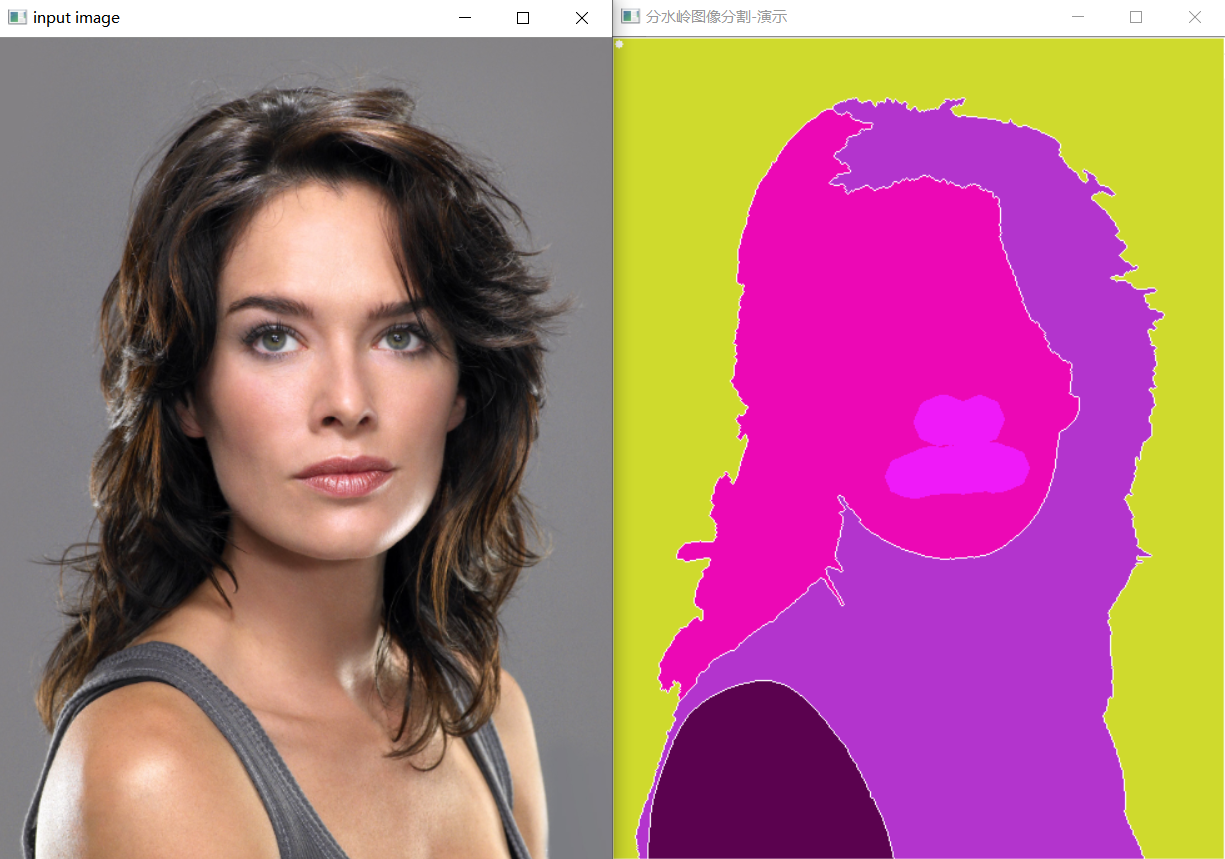
- 图像分割
#include <opencv2/opencv.hpp>
#include <iostream> using namespace cv;
using namespace std; int main(int argc, char** argv) {
Mat src = imread("D:/images/coins_001.jpg");
if (src.empty()) {
printf("could not load image...\n");
return -;
}
namedWindow("input image", CV_WINDOW_AUTOSIZE);
imshow("input image", src); Mat gray, binary, shifted;
pyrMeanShiftFiltering(src, shifted, , );
//imshow("shifted", shifted); //灰度
cvtColor(shifted, gray, COLOR_BGR2GRAY);
threshold(gray, binary, , , THRESH_BINARY | THRESH_OTSU);
//imshow("binary", binary); // 距离变换
Mat dist;
distanceTransform(binary, dist, DistanceTypes::DIST_L2, , CV_32F);
normalize(dist, dist, , , NORM_MINMAX);
//imshow("distance result", dist); // 二值化
threshold(dist, dist, 0.4, , THRESH_BINARY);
//imshow("distance binary", dist); // markers
Mat dist_m;
dist.convertTo(dist_m, CV_8U);
vector<vector<Point>> contours;
findContours(dist_m, contours, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE, Point(, )); // create markers
Mat markers = Mat::zeros(src.size(), CV_32SC1);
for (size_t t = ; t < contours.size(); t++) {
drawContours(markers, contours, static_cast<int>(t), Scalar::all(static_cast<int>(t) + ), -);
}
circle(markers, Point(, ), , Scalar(), -);
//imshow("markers", markers*10000); // 形态学操作 - 彩色图像,目的是去掉干扰,让结果更好
Mat k = getStructuringElement(MORPH_RECT, Size(, ), Point(-, -));
morphologyEx(src, src, MORPH_ERODE, k); // 完成分水岭变换
watershed(src, markers);
Mat mark = Mat::zeros(markers.size(), CV_8UC1);
markers.convertTo(mark, CV_8UC1);
bitwise_not(mark, mark, Mat());
//imshow("watershed result", mark); // generate random color
vector<Vec3b> colors;
for (size_t i = ; i < contours.size(); i++) {
int r = theRNG().uniform(, );
int g = theRNG().uniform(, );
int b = theRNG().uniform(, );
colors.push_back(Vec3b((uchar)b, (uchar)g, (uchar)r));
} // 颜色填充与最终显示
Mat dst = Mat::zeros(markers.size(), CV_8UC3);
int index = ;
for (int row = ; row < markers.rows; row++) {
for (int col = ; col < markers.cols; col++) {
index = markers.at<int>(row, col);
if (index > && index <= contours.size()) {
dst.at<Vec3b>(row, col) = colors[index - ];
}
else {
dst.at<Vec3b>(row, col) = Vec3b(, , );
}
}
} imshow("Final Result", dst);
printf("number of objects : %d\n", contours.size()); waitKey();
return ;
}
#include <opencv2/opencv.hpp>
#include <iostream> using namespace cv;
using namespace std; Mat watershedCluster(Mat &image, int &numSegments);
void createDisplaySegments(Mat &segments, int numSegments, Mat &image);
int main(int argc, char** argv) {
Mat src = imread("D:/images/cvtest.png");
if (src.empty()) {
printf("could not load image...\n");
return -;
}
namedWindow("input image", CV_WINDOW_AUTOSIZE);
imshow("input image", src); int numSegments;
Mat markers = watershedCluster(src, numSegments);
createDisplaySegments(markers, numSegments, src);
waitKey();
return ;
} Mat watershedCluster(Mat &image, int &numComp) {
// 二值化
Mat gray, binary;
cvtColor(image, gray, COLOR_BGR2GRAY);
//阈值
threshold(gray, binary, , , THRESH_BINARY | THRESH_OTSU);
// 形态学与距离变换
Mat k = getStructuringElement(MORPH_RECT, Size(, ), Point(-, -));
morphologyEx(binary, binary, MORPH_OPEN, k, Point(-, -));
Mat dist;
distanceTransform(binary, dist, DistanceTypes::DIST_L2, , CV_32F);
normalize(dist, dist, 0.0, 1.0, NORM_MINMAX); // 开始生成标记
threshold(dist, dist, 0.1, 1.0, THRESH_BINARY);
normalize(dist, dist, , , NORM_MINMAX);
dist.convertTo(dist, CV_8UC1); // 标记开始
vector<vector<Point>> contours;
vector<Vec4i> hireachy;
findContours(dist, contours, hireachy, RETR_CCOMP, CHAIN_APPROX_SIMPLE);
if (contours.empty()) {
return Mat();
} Mat markers(dist.size(), CV_32S);
markers = Scalar::all();
for (int i = ; i < contours.size(); i++) {
drawContours(markers, contours, i, Scalar(i + ), -, , hireachy, INT_MAX);
}
//填充
circle(markers, Point(, ), , Scalar(), -); // 分水岭变换
watershed(image, markers);
numComp = contours.size();
return markers;
} void createDisplaySegments(Mat &markers, int numSegments, Mat &image) {
// generate random color
vector<Vec3b> colors;
for (size_t i = ; i < numSegments; i++) {
int r = theRNG().uniform(, );
int g = theRNG().uniform(, );
int b = theRNG().uniform(, );
colors.push_back(Vec3b((uchar)b, (uchar)g, (uchar)r));
} // 颜色填充与最终显示
Mat dst = Mat::zeros(markers.size(), CV_8UC3);
int index = ;
for (int row = ; row < markers.rows; row++) {
for (int col = ; col < markers.cols; col++) {
index = markers.at<int>(row, col);
if (index > && index <= numSegments) {
dst.at<Vec3b>(row, col) = colors[index - ];
}
else {
dst.at<Vec3b>(row, col) = Vec3b(, , );
}
}
}
imshow("分水岭图像分割-演示", dst);
return;
}
opencv::分水岭图像分割的更多相关文章
- Opencv分水岭算法——watershed自动图像分割用法
分水岭算法是一种图像区域分割法,在分割的过程中,它会把跟临近像素间的相似性作为重要的参考依据,从而将在空间位置上相近并且灰度值相近的像素点互相连接起来构成一个封闭的轮廓,封闭性是分水岭算法的一个重要特 ...
- OpenCV 1 图像分割--分水岭算法代码
// watershed_test20140801.cpp : 定义控制台应用程序的入口点. // #include "stdafx.h" // // ch9_watershed ...
- opencv分水岭算法对图像进行切割
先看效果 说明 使用分水岭算法对图像进行切割,设置一个标记图像能达到比較好的效果,还能防止过度切割. 1.这里首先对阈值化的二值图像进行腐蚀,去掉小的白色区域,得到图像的前景区域.并对前景区域用255 ...
- OpenCV 之 图像分割 (一)
1 基于阈值 1.1 基本原理 灰度阈值化,是最简单也是速度最快的一种图像分割方法,广泛应用在硬件图像处理领域 (例如,基于 FPGA 的实时图像处理). 假设输入图像为 f,输出图像为 g,则经 ...
- Opencv 分水岭分割图片
#include <iostream>#include <opencv2/opencv.hpp> using namespace std;using namespace cv; ...
- opencv::KMeans图像分割
#include <opencv2/opencv.hpp> #include <iostream> using namespace cv; using namespace st ...
- opencv 金字塔图像分割
我所知的opencv中分割函数:watershed(只是看看效果,不能返回每类pixel类属),cvsegmentImage,cvPyrSegmentation(返回pixel类属) 金字塔分割原理篇 ...
- OpenCV——分水岭算法
分水岭算法,是一种基于拓扑理论的数学形态学的分割方法,其基本思想是把图像看作是测地学上的拓扑地貌,图像中每一点像素的灰度值表示该点的海拔高度,每一个局部极小值及其影响区域称为集水盆,而集水盆的边界则形 ...
- opencv kmeans 图像分割
利用kmeans算法,将彩色图像的像素点作为样本,rgb值作为样本的属性, 对图像所有的像素点进行分类,从而实现对图像中目标的分割. c++代码(openCV 2.4.11) Scalar color ...
随机推荐
- Android开发:getSupportFragmentManager()不可用
getSupportFragmentManager()这个函数不可用显然是因为activity继承错误了,因此我们需要将整个类的所继承的类改变即可 public class MainActivity ...
- matlab C程序
通过把耗时长的函数用c语言实现,并编译成mex函数可以加快执行速度 Matlab本身是不带c语言的编译器的,所以要求你的机器上已经安装有VC,BC或Watcom C中的一种 注:在Matlab里,矩阵 ...
- [UIApplication sharedApplication].keyWindow.rootViewController
一般来说 [UIApplication sharedApplication].keyWindow.rootViewController 会在 appDelegate 中初始化,并且整个应用运行过程中都 ...
- MVC 身份证图像识别(调用dll)
源码下载 -> 提取码 QQ505645074 Index.cshtml <!DOCTYPE html> <html> <head> <meta cha ...
- 微信小程序踩坑日记4——真机端解析json数组和开发平台不一样
0. 引言 环境:访问服务器端php,获取json数组,并渲染在前台 问题描述:保证在开发平台上的正常运行,但是在真机端却出现了无法正确解析wx.request()返回的数据(特指无法解析res.da ...
- 一文解读AIoT (转)
AIoT即AI+IoT,指的是人工智能技术与物联网在实际应用中的落地融合.目前,越来越多的行业及应用将AI与IoT结合到了一起,AIoT已经成为各大传统行业智能化升级的最佳通道,也是未来物联网发展的重 ...
- SpringBoot+Thyemelaf开发环境正常,打包jar发到服务器就报错Template might not exist or might not be accessible
这里说一下Thyemelaf的巨坑 写了一个SpringBoot+Thyemelaf的项目,并不是前后端分离.今天想放到linux服务器上玩玩,打成jar包,然后一运行他妈居然报错了,报了一个Temp ...
- Shell类
70个经典的 Shell 脚本面试问题 1) 如何向脚本传递参数 ? ./script argument 例子: 显示文件名称脚本 ./show.sh file1.txt cat show.sh ...
- django haystack报错: ModuleNotFoundError: No module named 'blog.whoosh_cn_backend'
在配置django haystack时报错: 解决方案: 将ENGINE的值 改为 这样就可以了.
- 编译安装nmap
官方编译文档 参考 安装对应的库,并编译安装.