input子系统事件处理层(evdev)的环形缓冲区【转】
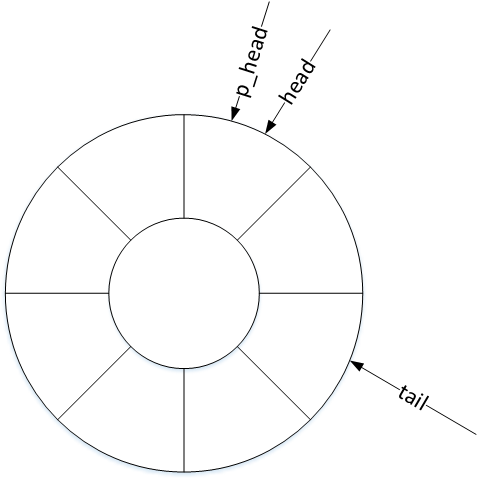
在事件处理层(evdev.c)中结构体evdev_client定义了一个环形缓冲区(circular buffer),其原理是用数组的方式实现了一个先进先出的循环队列(circular queue),用以缓存内核驱动上报给用户层的input_event事件。
struct evdev_client {
unsigned int head; // 头指针
unsigned int tail; // 尾指针
unsigned int packet_head; // 包指针
spinlock_t buffer_lock;
struct fasync_struct *fasync;
struct evdev *evdev;
struct list_head node;
unsigned int clk_type;
bool revoked;
unsigned long *evmasks[EV_CNT];
unsigned int bufsize; // 循环队列大小
struct input_event buffer[]; // 循环队列数组
};
evdev_client对象维护了三个偏移量:head、tail以及packet_head。head、tail作为循环队列的头尾指针记录入口与出口偏移,那么包指针packet_head有什么作用呢?
packet_head
内核驱动处理一次输入,可能上报一到多个input_event事件,为表示处理完成,会在上报这些input_event事件后再上报一次同步事件。头指针head以input_event事件为单位,记录缓冲区的入口偏移量,而包指针packet_head则以“数据包”(一到多个input_event事件)为单位,记录缓冲区的入口偏移量。
环形缓冲区的工作机制
- 循环队列入队算法:
head++;
head &= bufsize - 1;
- 循环队列出队算法:
tail++;
tail &= bufsize - 1;
- 循环队列已满条件:
head == tail
- 循环队列为空条件:
packet_head == tail
“求余”和“求与”
为解决头尾指针的上溢和下溢现象,使队列的元素空间可重复使用,一般循环队列的出入队算法都采用“求余”操作:
head = (head + 1) % bufsize; // 入队
tail = (tail + 1) % bufsize; // 出队
为避免计算代价高昂的“求余”操作,使内核运作更高效,input子系统的环形缓冲区采用了“求与”算法,这要求bufsize必须为2的幂,在后文中可以看到bufsize的值实际上是为64或者8的n倍,符合“求与”运算的要求。
环形缓冲区的构造以及初始化
用户层通过open()函数打开input设备节点时,调用过程如下:
open() -> sys_open() -> evdev_open()
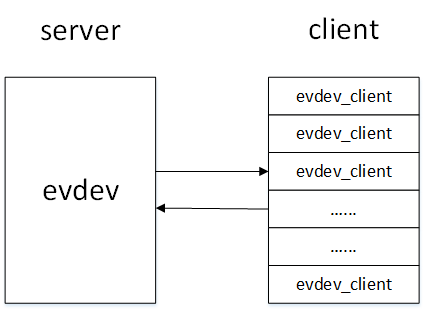
在evdev_open()函数中完成了对evdev_client对象的构造以及初始化,每一个打开input设备节点的用户都在内核中维护了一个evdev_client对象,这些evdev_client对象通过evdev_attach_client()函数注册在evdev1对象的内核链表上。
接下来我们具体分析evdev_open()函数:
static int evdev_open(struct inode *inode, struct file *file)
{
struct evdev *evdev = container_of(inode->i_cdev, struct evdev, cdev);
// 1.计算环形缓冲区大小bufsize以及evdev_client对象大小size
unsigned int bufsize = evdev_compute_buffer_size(evdev->handle.dev);
unsigned int size = sizeof(struct evdev_client) +
bufsize * sizeof(struct input_event);
struct evdev_client *client;
int error;
// 2. 分配内核空间
client = kzalloc(size, GFP_KERNEL | __GFP_NOWARN);
if (!client)
client = vzalloc(size);
if (!client)
return -ENOMEM;
client->bufsize = bufsize;
spin_lock_init(&client->buffer_lock);
client->evdev = evdev;
// 3. 注册到内核链表
evdev_attach_client(evdev, client);
error = evdev_open_device(evdev);
if (error)
goto err_free_client;
file->private_data = client;
nonseekable_open(inode, file);
return 0;
err_free_client:
evdev_detach_client(evdev, client);
kvfree(client);
return error;
}
在evdev_open()函数中,我们看到了evdev_client对象从构造到注册到内核链表的过程,然而它是在哪里初始化的呢?其实kzalloc()函数在分配空间的同时就通过__GFP_ZERO标志做了初始化:
static inline void *kzalloc(size_t size, gfp_t flags)
{
return kmalloc(size, flags | __GFP_ZERO);
}
生产者/消费者模型
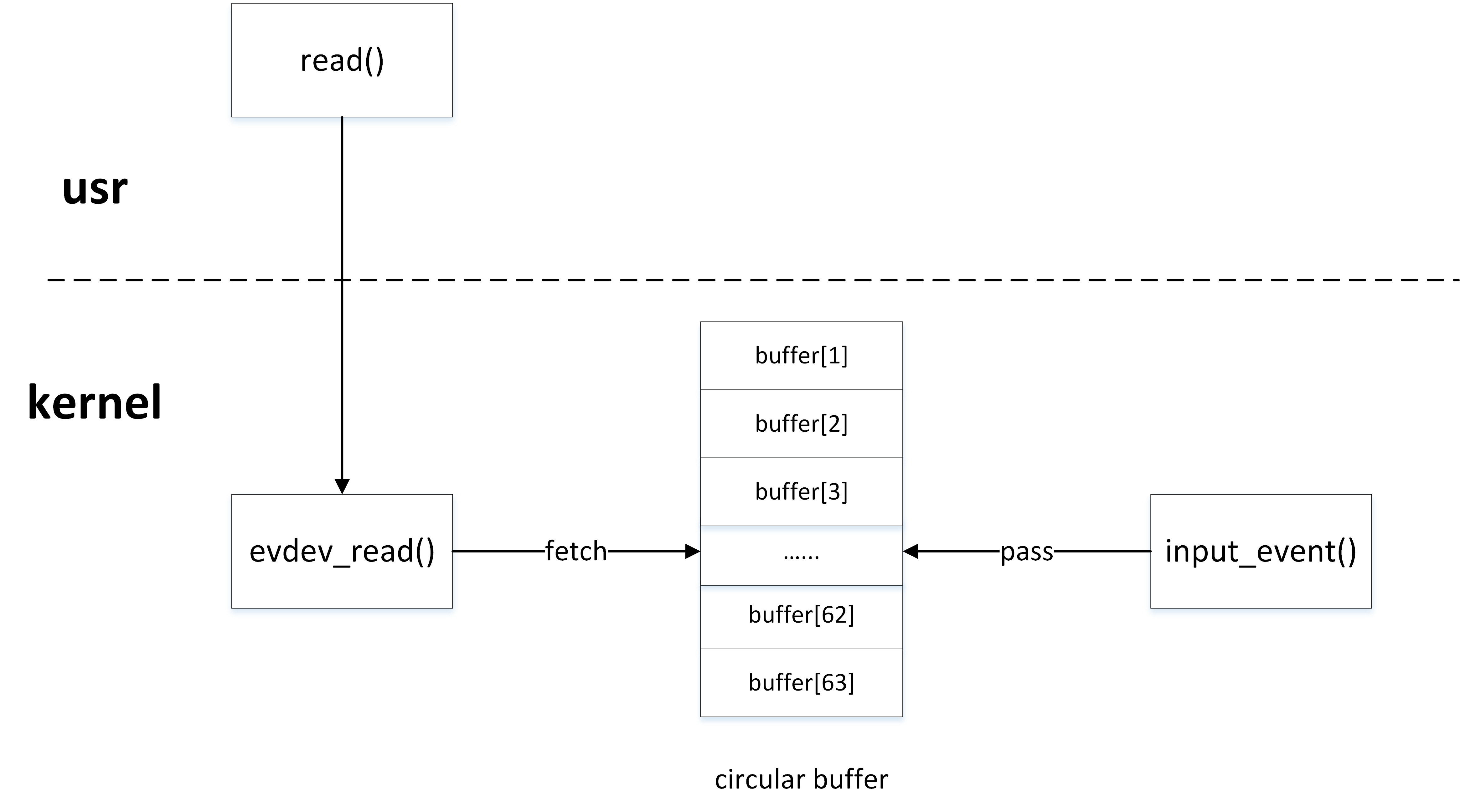
内核驱动与用户程序就是典型的生产者/消费者模型,内核驱动产生input_event事件,然后通过input_event()函数写入环形缓冲区,用户程序通过read()函数从环形缓冲区中获取input_event事件。
环形缓冲区的生产者
内核驱动作为生产者,通过input_event()上报input_event事件时,最终调用___pass_event()函数将事件写入环形缓冲区:
static void __pass_event(struct evdev_client *client,
const struct input_event *event)
{
// 将input_event事件存入缓冲区,队头head自增指向下一个元素空间
client->buffer[client->head++] = *event;
client->head &= client->bufsize - 1;
// 当队头head与队尾tail相等时,说明缓冲区空间已满
if (unlikely(client->head == client->tail)) {
/*
* This effectively "drops" all unconsumed events, leaving
* EV_SYN/SYN_DROPPED plus the newest event in the queue.
*/
client->tail = (client->head - 2) & (client->bufsize - 1);
client->buffer[client->tail].time = event->time;
client->buffer[client->tail].type = EV_SYN;
client->buffer[client->tail].code = SYN_DROPPED;
client->buffer[client->tail].value = 0;
client->packet_head = client->tail;
}
// 当遇到EV_SYN/SYN_REPORT同步事件时,packet_head移动到队头head位置
if (event->type == EV_SYN && event->code == SYN_REPORT) {
client->packet_head = client->head;
kill_fasync(&client->fasync, SIGIO, POLL_IN);
}
}
环形缓冲区的消费者
用户程序作为消费者,通过read()函数读取input设备节点时,最终在内核调用evdev_fetch_next_event()函数从环形缓冲区中读取input_event事件:
static int evdev_fetch_next_event(struct evdev_client *client,
struct input_event *event)
{
int have_event;
spin_lock_irq(&client->buffer_lock);
// 判缓冲区中是否有input_event事件
have_event = client->packet_head != client->tail;
if (have_event) {
// 从缓冲区中读取一次input_event事件,队尾tail自增指向下一个元素空间
*event = client->buffer[client->tail++];
client->tail &= client->bufsize - 1;
if (client->use_wake_lock &&
client->packet_head == client->tail)
wake_unlock(&client->wake_lock);
}
spin_unlock_irq(&client->buffer_lock);
return have_event;
}
input子系统事件处理层(evdev)的环形缓冲区【转】的更多相关文章
- 【Linux高级驱动】input子系统框架
[1.input子系统框架(drivers\input)] 如何得出某个驱动所遵循的框架? 1) 通过网络搜索 2) 自己想办法跟内核代码! 2.1 定位此驱动是属于哪种类 ...
- 【Linux高级驱动】input子系统框架【转】
转自:http://www.cnblogs.com/lcw/p/3802617.html [1.input子系统框架(drivers\input)] 如何得出某个驱动所遵循的框架? 1) 通过网 ...
- 【驱动】input子系统全面分析
初识linux输入子系统 linux输入子系统(linux input subsystem)从上到下由三层实现,分别为:输入子系统事件处理层(EventHandler).输入子系统核心层(InputC ...
- linux输入子系统(6)-input子系统介绍及结构图
注:本系列转自: http://www.ourunix.org/post/290.html input子系统介绍 输入设备(如按键,键盘,触摸屏,鼠标,蜂鸣器等)是典型的字符设备,其一 ...
- input子系统详解
一.初识linux输入子系统 linux输入子系统(linux input subsystem)从上到下由三层实现,分别为:输入子系统事件处理层(EventHandler).输入子系统核心层(Inpu ...
- driver: Linux设备模型之input子系统详解
本节从整体上讲解了输入子系统的框架结构.有助于读者从整体上认识linux的输入子系统.在陷入代码分析的过程中,通过本节的知识能够找准方向,明白原理. 本节重点: 输入子系统的框架结构 各层对应内核中的 ...
- driver: Linux设备模型之input子系统具体解释
本节从总体上解说了输入子系统的框架结构.有助于读者从总体上认识linux的输入子系统.在陷入代码分析的过程中,通过本节的知识可以找准方向,明确原理. 本节重点: 输入子系统的框架结构 各层相应内核中的 ...
- linux kernel input 子系统分析
Linux 内核为了处理各种不同类型的的输入设备 , 比如说鼠标 , 键盘 , 操纵杆 , 触摸屏 , 设计并实现了一个对上层应用统一的试图的抽象层 , 即是Linux 输入子系统 . 输入子系统的层 ...
- Linux Input子系统
先贴代码: //input.c int input_register_handler(struct input_handler *handler) { //此处省略很多代码 list_for_each ...
随机推荐
- Xshell连接ESXI方法
第一步.ESXI打开ssh功能按住F2进入设置如下图: 第二步.输入密码 第三步.选择Troubleshooting Options 回车 第四步.选择Enable SSH 这里只介绍了一种方式打开E ...
- Redis学习系列七分布式锁
一.简介 熟悉.Net多线程的都知道,当多个线程同时操作一个全局缓存对象(static对象实例.Dictionary.List等)时,会存在多线程争用问题,包括EF.Dapper等本身的缓存机制,都存 ...
- mysql 开发进阶篇系列 39 mysql日志之二进制日志(binlog)
一.概述 二进制日志(binlog)记录了所有的DDL(数据定义语言)语句和DML(数据操纵语言)语句,但是不包括数据查询语句, 语句以"事件"的形式保存,它描述了数据的更改过程, ...
- NAT转换、VLAN与Trunk(特典:ACL初步)
一.NAT(网络地址转换) 即公有地址转换为私有地址 私有地址段(非公网地址,即公网不识别) A 10.0.0.0 10.255.255.255 B 17 ...
- zmq setsockopt()
zmq.RCVTIMEO:在一个recv操作返回EAGAIN错误前的最大时间 设置socket的接收操作超时时间.如果属性值是0,zmq_recv(3)函数将会立刻返回,如果没有接收到任何消息,将会返 ...
- 四、windows下TortoiseGit的使用与操作
使用 Git命令有时候确实不怎么方便,特别是每次都要输入密码,如果配置 SSH 的方式,又实在是很麻烦.(当然,必须使用 Windows 神器才有方便友好的客户端图形界面啦!!!) 关于 Tortoi ...
- oracle中if/else的三种实现方式
1.标准sql规范 .单个IF IF v=... THEN END IF; .IF ... ELSE IF v=... THEN ELSE t....; END IF; .多个IF IF v=... ...
- #14 Python模块
前言 前面的文章中,有许多地方都用到了Python的模块,这个到底是个什么神奇的东西呢?让我们来一起盘它! 一.什么是模块 在前几节中,我们已经接触了一些模块:math.random.time等,它们 ...
- 微信小程序 - 入门指引
稍微整了整微信小程序,还是有不少问题的,做个小总结吧 和以往一样,本次项目也放到了 Github 中,欢迎围观 star ~ 一.微信公众平台 - 小程序后台 1.申请小程序账号 官网注册 注册时所用 ...
- c# 匿名方法几种表现形式
delegate int del(int a); static void Main(string[] args) { //匿名方法的几种表现形式 del del = delegate (int x) ...