UR机械臂运动学正逆解方法
最近几个月因为工作接触到了机械臂的项目,突然对机械臂运动方法产生了兴趣,也就是如何控制机械臂的位置和姿态。借用一张网上的图片,应该是ur5的尺寸。我用到的是ur3机械臂,除了尺寸不一样,各关节结构和初始位置和ur5是一样的。
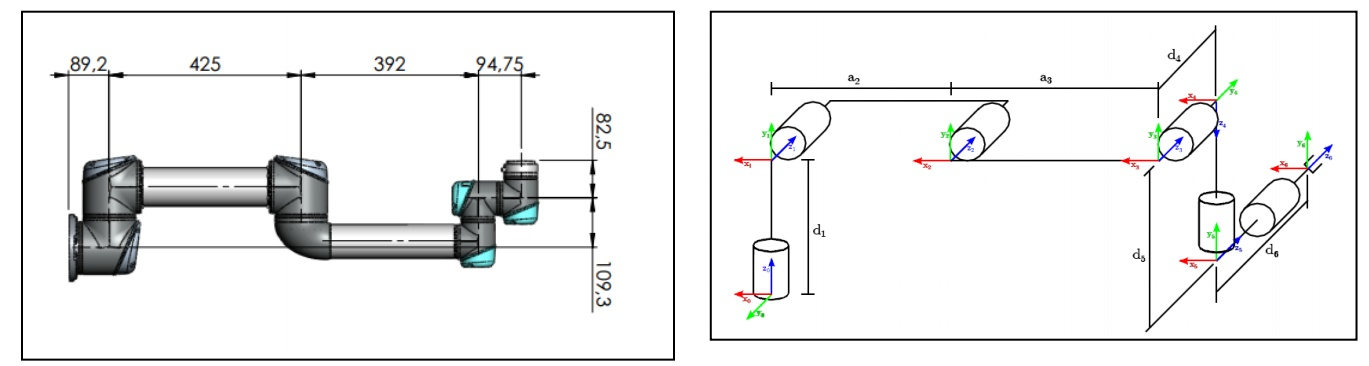
ur机械臂是六自由度机械臂,由D-H参数法确定它的运动学模型,连杆坐标系的建立如上图所示。我当时在这个地方的理解上走了不少弯路,后来找个一个视频,我觉得讲解地比较容易理解,可以参考一下Denavit-Hartenberg参数视频详解。ur机械臂DH参数表如下,
转动关节θi是关节变量,连杆偏移di是常数。
|
关节编号 |
α(绕x轴) |
a(沿x轴) |
θ(绕z轴) |
d(沿z轴) |
|
1 |
α1=90 |
0 |
θ1 |
d1=89.2 |
|
2 |
0 |
a2=-425 |
θ2 |
0 |
|
3 |
0 |
a3=-392 |
θ3 |
0 |
|
4 |
α4=90 |
0 |
θ4 |
d4=109.3 |
|
5 |
α5=-90 |
0 |
θ5 |
d5=94.75 |
|
6 |
0 |
0 |
θ6 |
d6=82.5 |
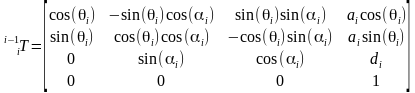
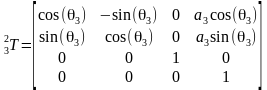
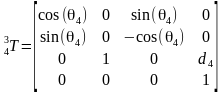
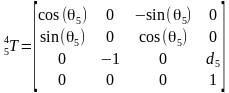
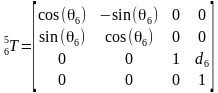
由此可以建立坐标系i在坐标系i-1的齐次变换矩阵,注意每次不管平移还是旋转是相对于当前的运动坐标系变换,矩阵右乘

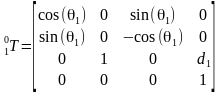
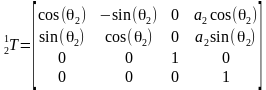
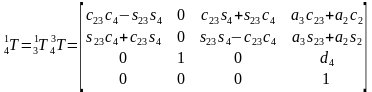
那么把DH参数代入就可以得到所有相邻坐标系的变换矩阵
所以末端坐标系6到基座固定坐标系0的变换矩阵 。那么求正解就很简单了,只要输入六个关节角度θi,就得到末端坐标在基坐标系的变换矩阵T。ur机械臂的视教板上末端点的坐标是用六个值[x, y, z, rx, ry, rz]表示的。前三个值[x, y, z]是三维笛卡尔坐标,表示空间位置,后三个值[rx, ry, rz]是坐标旋转向量,表示空间姿态。我们得到的变换矩阵T怎么变成六值坐标[x, y, z, rx, ry, rz]呢?设
。那么求正解就很简单了,只要输入六个关节角度θi,就得到末端坐标在基坐标系的变换矩阵T。ur机械臂的视教板上末端点的坐标是用六个值[x, y, z, rx, ry, rz]表示的。前三个值[x, y, z]是三维笛卡尔坐标,表示空间位置,后三个值[rx, ry, rz]是坐标旋转向量,表示空间姿态。我们得到的变换矩阵T怎么变成六值坐标[x, y, z, rx, ry, rz]呢?设

T的左上角的3x3矩阵是旋转矩阵,旋转矩阵和旋转向量之间可以通过罗德里格斯(Rodrigues)变换进行转换。opencv里有相应的函数调用。算法也比较简单,不用opencv的函数自己写代码也不难。T的右上角3x1就是空间位置[x, y, z]。这样有变换矩阵T得到六值坐标,完成了正解。
逆解相对要复杂一些,由末端的空间位置和姿态,计算可能的关节角度。逆解的方法有解析法,迭代法和几何法。其中解析法用数学推导,可以得到全部根,但是计算复杂。有的机械臂可以得到无穷解,比如7轴机械臂。而ur的6轴机械臂是有有限解的。这里推导一下ur的逆解。
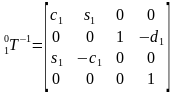
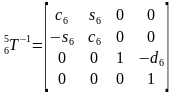
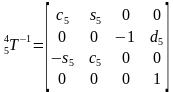
首先计算求变换矩阵T过程其中的一些中间矩阵。
 ,其中c23=cos(θ2+θ3),s23=sin(θ2+θ3)。
,其中c23=cos(θ2+θ3),s23=sin(θ2+θ3)。

由得到 。计算
。计算
 ,
, ,得到
,得到

等式两边矩阵的行列应该分别相等,由第三行第四列得到 ,可解得
,可解得 ,有两个解。这里注意写程序的时候,求解这里的反正切是用atan2()这类的函数,返回之在(-π,+π]。而反余弦的返回值在[0,π],从而保证在2π范围两个解是不同的。
,有两个解。这里注意写程序的时候,求解这里的反正切是用atan2()这类的函数,返回之在(-π,+π]。而反余弦的返回值在[0,π],从而保证在2π范围两个解是不同的。
由第三行第三列得 ,可解得
,可解得 ,两个解。由第三行第二列得到
,两个解。由第三行第二列得到 ,可解得
,可解得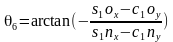 。
。
接着由
 ,
,
计算
 ,得出等式左边等于
,得出等式左边等于
 。
。
由 ,两边平方,令
,两边平方,令 ,
, 。
。
同样由 ,令
,令 ,
, 。
。
两式相加得到 ,则
,则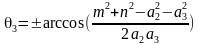 ,有两个解。
,有两个解。
把θ3带入 和
和 ,得
,得 ,
, ,其中t2=tanθ2。两式消去c2,得到
,其中t2=tanθ2。两式消去c2,得到 。
。
最后得到 ,从而得到θ4。
,从而得到θ4。
p { margin-bottom: 0.1in; line-height: 120% }
a:link { }
综合有两个解的情况,ur机械臂逆解总共由2x2x2=8组解。
按照上面的算法,用python写了两个程序,一个正解一个逆解验证一下。工作手边是ur3的机械臂,上面的图和表都是ur5的,换成ur3的参数。正解算出来都没有问题,可以和实际机械臂的空间位姿对应。可是逆解算出来8组值,好像只有四组值是对的。一直还没理解到底是怎么回事,仔细检查了算法和程序好像都没有错阿,不知道是哪里出了问题。网上也没有找到答案,如果哪位大神知道,望不吝赐教!
UR机械臂运动学正逆解方法的更多相关文章
- 机械臂运动学逆解(Analytical solution)
计算机器人运动学逆解首先要考虑可解性(solvability),即考虑无解.多解等情况.在机器人工作空间外的目标点显然是无解的.对于多解的情况从下面的例子可以看出平面二杆机械臂(两个关节可以360°旋 ...
- 基于 Mathematica 的机器人仿真环境(机械臂篇)[转]
完美的教程,没有之一,收藏学习. 目的 本文手把手教你在 Mathematica 软件中搭建机器人的仿真环境,具体包括以下内容(所使用的版本是 Mathematica 11.1,更早的版本可能缺少某些 ...
- V-rep学习笔记:并联机构正逆运动学
Solving the FK problem of simple kinematic chains is trivial (just apply the desired joint values to ...
- ROS机械臂 Movelt 学习笔记2 | Move Group 接口 C++
Movelt为使用者提供了一个最通用且简单的接口 MoveGroupInterface 类,这个接口提供了很多控制机器人的常用基本操作,如: 设置机械臂的位姿 进行运动规划 移动机器人本体 将物品添加 ...
- 使用VTK与Python实现机械臂三维模型可视化
三维可视化系统的建立依赖于三维图形平台, 如 OpenGL.VTK.OGRE.OSG等, 传统的方法多采用OpenGL进行底层编程,即对其特有的函数进行定量操作, 需要开发人员熟悉相关函数, 从而造成 ...
- ROS机械臂 Movelt 学习笔记1 | 基础准备
环境:Ubuntu18.04 + ROS Melodic 1. 安装ROS 官网下载安装步骤:http://wiki.ros.org/melodic/Installation/Ubuntu 一键安装的 ...
- ROS机械臂 Movelt 学习笔记4 | Move Group 接口 Python
Python 的使用总是比 C++ 简单许多,Move Group 的 Python 接口更为便捷,也为使用者提供了很多用于操纵机器人和机械臂的函数,能够和 C++ 接口实现相同的功能: 设置机械臂的 ...
- Android版网易云音乐唱片机唱片磁盘旋转及唱片机机械臂动画关键代码实现思路
Android版网易云音乐唱片机唱片磁盘旋转及唱片机机械臂动画关键代码实现思路 先看一看我的代码运行结果. 代码运行起来初始化状态: 点击开始按钮,唱片机的机械臂匀速接近唱片磁盘,同时唱片磁盘也 ...
- 记一次 .NET 某机械臂智能机器人控制系统MRS CPU爆高分析
一:背景 1. 讲故事 这是6月中旬一位朋友加wx求助dump的故事,他的程序 cpu爆高UI卡死,问如何解决,截图如下: 在拿到这个dump后,我发现这是一个关于机械臂的MRS程序,哈哈,在机械臂这 ...
随机推荐
- Ubuntu系统下配置IP地址方法介绍
配置IP方式有两种: 1.通过命令直接配置 sudo ifconfig eth0 IP地址 netmask 子网掩码------配置IP地 sudo route add default gw 网关-- ...
- MySQL中遇到的几种报错及其解决方法
MySQL中遇到的几种报错及其解决方法 1.[Err] 1064 - You have an error in your SQL syntax; check the manual that corre ...
- Aptana版本回滚的方法
最近Aptana对Django1.7的编译支持有点问题,开发环境必须使用Django1.6版本,今天看了一眼它的官网,版本已经到3.6.1,我的版本还是3.4.2,就checkupdate升级到3.6 ...
- php仿经典省市县三级联动
之前有个需求要写个类似省市县三级联动的页面,于是,网上找了点资料看了下,其实原理很简单: 当我们选择一级栏目中某条记录的时候,会获取该栏目的vaule值,并发起ajax请求,后台根据这个vaule值, ...
- Java开源生鲜电商平台-盈利模式详解(源码可下载)
Java开源生鲜电商平台-盈利模式详解(源码可下载) 该平台提供一个联合买家与卖家的一个平台.(类似淘宝购物,这里指的是食材的购买.) 平台有以下的盈利模式:(类似的平台有美菜网,食材网等) 1. 订 ...
- 拾人牙慧篇之——linux文件挂载,基于nfs的文件共享系统安装配置
一.写在前面 最近需要把阿里云上的四台服务器的项目迁移到客户提供的新的项目中,阿里云的项目平时开发启动的时候知道有个nfs文件系统,表现就是后台管理系统通过freemarker生成的HTML文件,自动 ...
- angular2 安装 打包成发布项目过程
安装之前要有typings和typescript全局已经安装好 安装命令新版为npm install -g @angular/cli 原来的angular-cli为老版的,我安装失败了 安装之后新建一 ...
- API管理平台XXL-API
<API管理平台XXL-API> 一.简介 1.1 概述 XXL-API是一个简洁易用API管理平台,提供API的"管理"."文档"."M ...
- C#实现的HttpGet请求
话不多说,代码贴上: /// <summary> /// HTTP Get请求 /// </summary> /// <param name="url" ...
- 用分支限界法解决人员安排问题(Personnel assignment problem)
最近考期博主比较忙,先把思路简单说说,图和代码考完试补. 人员安排问题,即给出员工集合和工作集合,寻找最合理的安排. 对于员工集合P,员工集合会依据某个f来给出某种顺序,需要按该顺序P(i)进行工作安 ...