UR机械臂运动学正逆解方法
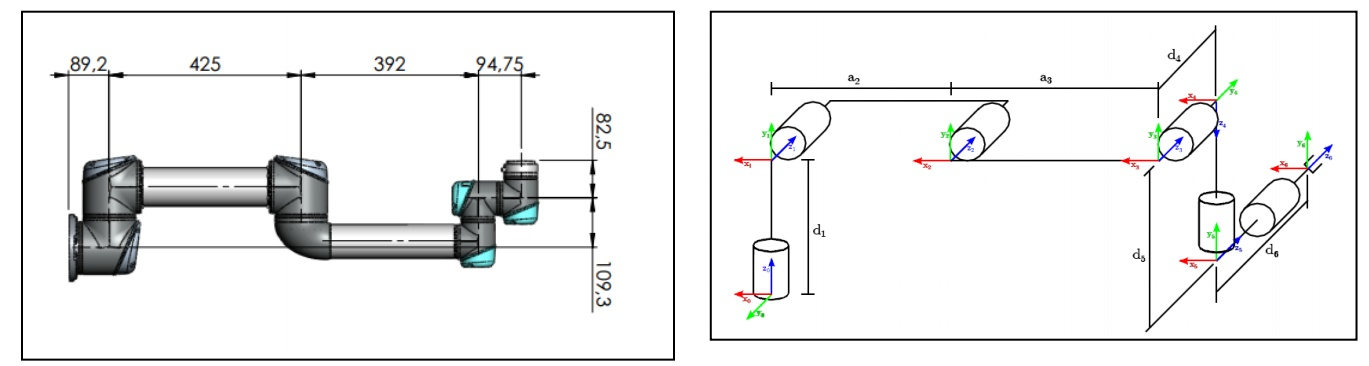
最近几个月因为工作接触到了机械臂的项目,突然对机械臂运动方法产生了兴趣,也就是如何控制机械臂的位置和姿态。借用一张网上的图片,应该是ur5的尺寸。我用到的是ur3机械臂,除了尺寸不一样,各关节结构和初始位置和ur5是一样的。
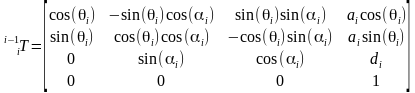
ur机械臂是六自由度机械臂,由D-H参数法确定它的运动学模型,连杆坐标系的建立如上图所示。我当时在这个地方的理解上走了不少弯路,后来找个一个视频,我觉得讲解地比较容易理解,可以参考一下Denavit-Hartenberg参数视频详解。ur机械臂DH参数表如下,
转动关节θi是关节变量,连杆偏移di是常数。
|
关节编号 |
α(绕x轴) |
a(沿x轴) |
θ(绕z轴) |
d(沿z轴) |
|
1 |
α1=90 |
0 |
θ1 |
d1=89.2 |
|
2 |
0 |
a2=-425 |
θ2 |
0 |
|
3 |
0 |
a3=-392 |
θ3 |
0 |
|
4 |
α4=90 |
0 |
θ4 |
d4=109.3 |
|
5 |
α5=-90 |
0 |
θ5 |
d5=94.75 |
|
6 |
0 |
0 |
θ6 |
d6=82.5 |
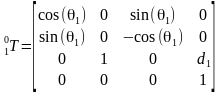
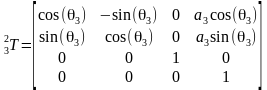
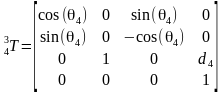
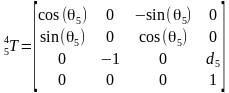
由此可以建立坐标系i在坐标系i-1的齐次变换矩阵,注意每次不管平移还是旋转是相对于当前的运动坐标系变换,矩阵右乘

那么把DH参数代入就可以得到所有相邻坐标系的变换矩阵
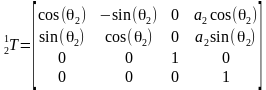
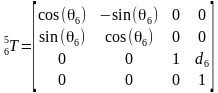
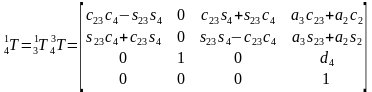
所以末端坐标系6到基座固定坐标系0的变换矩阵 。那么求正解就很简单了,只要输入六个关节角度θi,就得到末端坐标在基坐标系的变换矩阵T。ur机械臂的视教板上末端点的坐标是用六个值[x, y, z, rx, ry, rz]表示的。前三个值[x, y, z]是三维笛卡尔坐标,表示空间位置,后三个值[rx, ry, rz]是坐标旋转向量,表示空间姿态。我们得到的变换矩阵T怎么变成六值坐标[x, y, z, rx, ry, rz]呢?设
。那么求正解就很简单了,只要输入六个关节角度θi,就得到末端坐标在基坐标系的变换矩阵T。ur机械臂的视教板上末端点的坐标是用六个值[x, y, z, rx, ry, rz]表示的。前三个值[x, y, z]是三维笛卡尔坐标,表示空间位置,后三个值[rx, ry, rz]是坐标旋转向量,表示空间姿态。我们得到的变换矩阵T怎么变成六值坐标[x, y, z, rx, ry, rz]呢?设

T的左上角的3x3矩阵是旋转矩阵,旋转矩阵和旋转向量之间可以通过罗德里格斯(Rodrigues)变换进行转换。opencv里有相应的函数调用。算法也比较简单,不用opencv的函数自己写代码也不难。T的右上角3x1就是空间位置[x, y, z]。这样有变换矩阵T得到六值坐标,完成了正解。
逆解相对要复杂一些,由末端的空间位置和姿态,计算可能的关节角度。逆解的方法有解析法,迭代法和几何法。其中解析法用数学推导,可以得到全部根,但是计算复杂。有的机械臂可以得到无穷解,比如7轴机械臂。而ur的6轴机械臂是有有限解的。这里推导一下ur的逆解。
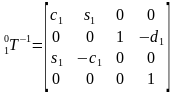
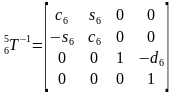
首先计算求变换矩阵T过程其中的一些中间矩阵。
 ,其中c23=cos(θ2+θ3),s23=sin(θ2+θ3)。
,其中c23=cos(θ2+θ3),s23=sin(θ2+θ3)。

由得到 。计算
。计算
 ,
, ,得到
,得到

等式两边矩阵的行列应该分别相等,由第三行第四列得到 ,可解得
,可解得 ,有两个解。这里注意写程序的时候,求解这里的反正切是用atan2()这类的函数,返回之在(-π,+π]。而反余弦的返回值在[0,π],从而保证在2π范围两个解是不同的。
,有两个解。这里注意写程序的时候,求解这里的反正切是用atan2()这类的函数,返回之在(-π,+π]。而反余弦的返回值在[0,π],从而保证在2π范围两个解是不同的。
由第三行第三列得 ,可解得
,可解得 ,两个解。由第三行第二列得到
,两个解。由第三行第二列得到 ,可解得
,可解得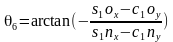 。
。
接着由
 ,
,
计算
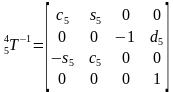 ,得出等式左边等于
,得出等式左边等于
 。
。
由 ,两边平方,令
,两边平方,令 ,
, 。
。
同样由 ,令
,令 ,
, 。
。
两式相加得到 ,则
,则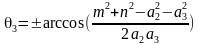 ,有两个解。
,有两个解。
把θ3带入 和
和 ,得
,得 ,
, ,其中t2=tanθ2。两式消去c2,得到
,其中t2=tanθ2。两式消去c2,得到 。
。
最后得到 ,从而得到θ4。
,从而得到θ4。
p { margin-bottom: 0.1in; line-height: 120% }
a:link { }
综合有两个解的情况,ur机械臂逆解总共由2x2x2=8组解。
按照上面的算法,用python写了两个程序,一个正解一个逆解验证一下。工作手边是ur3的机械臂,上面的图和表都是ur5的,换成ur3的参数。正解算出来都没有问题,可以和实际机械臂的空间位姿对应。可是逆解算出来8组值,好像只有四组值是对的。一直还没理解到底是怎么回事,仔细检查了算法和程序好像都没有错阿,不知道是哪里出了问题。网上也没有找到答案,如果哪位大神知道,望不吝赐教!
UR机械臂运动学正逆解方法的更多相关文章
- 机械臂运动学逆解(Analytical solution)
计算机器人运动学逆解首先要考虑可解性(solvability),即考虑无解.多解等情况.在机器人工作空间外的目标点显然是无解的.对于多解的情况从下面的例子可以看出平面二杆机械臂(两个关节可以360°旋 ...
- 基于 Mathematica 的机器人仿真环境(机械臂篇)[转]
完美的教程,没有之一,收藏学习. 目的 本文手把手教你在 Mathematica 软件中搭建机器人的仿真环境,具体包括以下内容(所使用的版本是 Mathematica 11.1,更早的版本可能缺少某些 ...
- V-rep学习笔记:并联机构正逆运动学
Solving the FK problem of simple kinematic chains is trivial (just apply the desired joint values to ...
- ROS机械臂 Movelt 学习笔记2 | Move Group 接口 C++
Movelt为使用者提供了一个最通用且简单的接口 MoveGroupInterface 类,这个接口提供了很多控制机器人的常用基本操作,如: 设置机械臂的位姿 进行运动规划 移动机器人本体 将物品添加 ...
- 使用VTK与Python实现机械臂三维模型可视化
三维可视化系统的建立依赖于三维图形平台, 如 OpenGL.VTK.OGRE.OSG等, 传统的方法多采用OpenGL进行底层编程,即对其特有的函数进行定量操作, 需要开发人员熟悉相关函数, 从而造成 ...
- ROS机械臂 Movelt 学习笔记1 | 基础准备
环境:Ubuntu18.04 + ROS Melodic 1. 安装ROS 官网下载安装步骤:http://wiki.ros.org/melodic/Installation/Ubuntu 一键安装的 ...
- ROS机械臂 Movelt 学习笔记4 | Move Group 接口 Python
Python 的使用总是比 C++ 简单许多,Move Group 的 Python 接口更为便捷,也为使用者提供了很多用于操纵机器人和机械臂的函数,能够和 C++ 接口实现相同的功能: 设置机械臂的 ...
- Android版网易云音乐唱片机唱片磁盘旋转及唱片机机械臂动画关键代码实现思路
Android版网易云音乐唱片机唱片磁盘旋转及唱片机机械臂动画关键代码实现思路 先看一看我的代码运行结果. 代码运行起来初始化状态: 点击开始按钮,唱片机的机械臂匀速接近唱片磁盘,同时唱片磁盘也 ...
- 记一次 .NET 某机械臂智能机器人控制系统MRS CPU爆高分析
一:背景 1. 讲故事 这是6月中旬一位朋友加wx求助dump的故事,他的程序 cpu爆高UI卡死,问如何解决,截图如下: 在拿到这个dump后,我发现这是一个关于机械臂的MRS程序,哈哈,在机械臂这 ...
随机推荐
- Day4_名称空间与作用域
函数嵌套: 函数的嵌套调用:在调用一个函数的过程中,又调用了了另外一个函数 比如说比较多个值的大小,可以利用这种方法: def max2(x,y): if x > y: return x els ...
- 阿里服务器CentOS报错base ls command not found
第一次linux中安装jdk时,踩过的坑. 1.vi command not found ,输入任何命令都无法实现 只要原因是因为环境变量的问题,编辑profile文件没有写正确,导致在命令行下 ls ...
- SQL Server 表的管理_关于数据增删查改的操作的详解(案例代码)
SQL Server 表的管理_关于数据增删查改的操作的详解(案例代码)-DML 1.SQL INSERT INTO 语句(在表中插入) INSERT INTO 语句用于向表中插入新记录. SQL I ...
- python笔记:#004#注释
注释 目标 注释的作用 单行注释(行注释) 多行注释(块注释) 01. 注释的作用 使用用自己熟悉的语言,在程序中对某些代码进行标注说明,增强程序的可读性 02. 单行注释(行注释) 以 # 开头,# ...
- Java数组的复制全解
1.将一个基本数据类型数组的引用赋值给另一个数组 public class Array_copy { int[] array1=new int[]{1,2,3,4,5,6}; int[] array2 ...
- 第二课:Hadoop集群环境配置
一.Yum配置 1.检查Yum是否安装 rpm -qa|grep yum 2.修改yum源,我使用的是163的镜像源(http://mirrors.163.com/),根据自己的系统选择源, #进入目 ...
- 学习笔记 C++ 链表
今天查了不少关于链表的资料大概理解了链表,为记录只用留笔于此. 链表概述:动态的数据存储单元,可以比数组更加灵活. 链表的组成:存储的数据,下一个节点. 首先让我们用代码完成一个节点. class N ...
- Pygame常用方法
'''import pygame# 初始化pygame库,让计算机硬件准备pygame.init()# ----------窗口相关操作-----------# 创建窗口window = pygame ...
- Nginx负载均衡和反向代理
1:反向代理 代理就是中介,那有反向代理就有正向代理,两者的区别是什么嘞? 正向代理隐藏真实客户端,服务端不知道实际发起请求的客户端.,proxy和client同属一个LAN,对server透明: 反 ...
- 浅谈Java多线程的同步问题 【转】
多线程的同步依靠的是对象锁机制,synchronized关键字的背后就是利用了封锁来实现对共享资源的互斥访问. 下面以一个简单的实例来进行对比分析.实例要完成的工作非常简单,就是创建10个线程,每个线 ...