二、STM32F103C8T6-定时器
STM32F103C8T6 定时器概述
STM32F103C8T6 作为一款广泛使用的微控制器,内置多个定时器,能够支持多种计时和控制功能,如精确延时、脉冲宽度调制(PWM)、捕获比较(Capture/Compare)、输入捕获 和 输出比较 等。这些功能在电机控制、信号测量、周期性事件触发等应用中非常常用。
STM32F103C8T6 的定时器分类
一、高级定时器(TIM1):高级定时器不仅具有基本的定时和计数功能,还支持高级功能,如死区控制(dead-time generation)、互补输出、刹车功能和自动重装载预加载(ARR preload),这些功能使其特别适合用于复杂的电机控制和电源管理应用。
- 提供增强的功能,特别适合 PWM 控制、电机控制。
- 支持多通道 PWM 输出,具有丰富的捕获/比较功能。
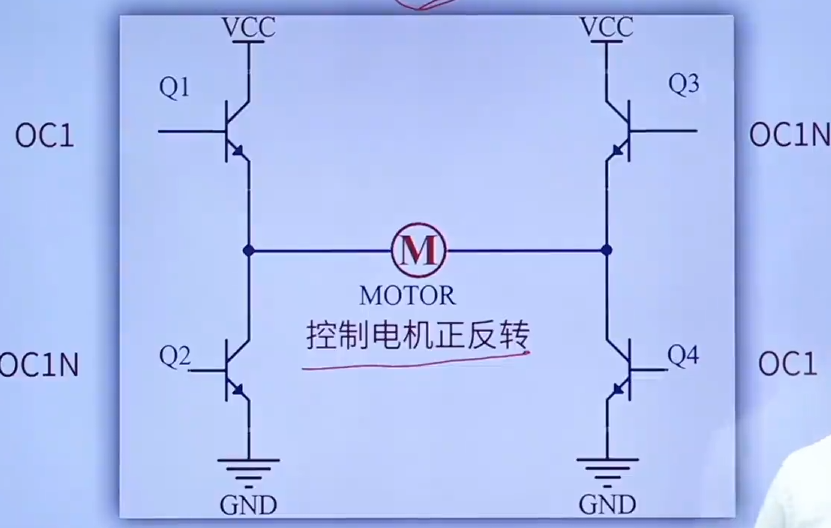
高级定时器互补输出:互补输出是通过定时器的多个输出通道生成一对相反的 PWM 信号,即一个信号为高电平时,另一个信号为低电平。互补输出常用于控制 全桥电路 或 半桥电路,从而驱动 MOSFET 或 IGBT 等开关器件。
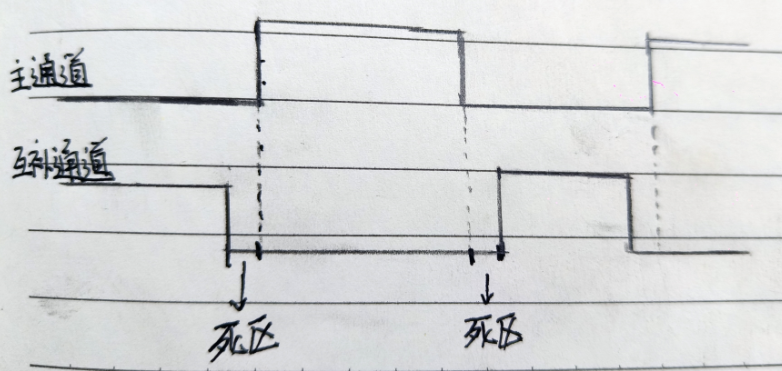
互补输出的基本原理:
主通道(主输出):高级定时器生成的 PWM 信号,用于驱动负载或开关。
互补通道(互补输出):与主通道相反的信号(即互补信号),用于驱动相反极性的开关器件,确保系统中不会同时导通同一条导通路径的两个开关,避免短路。
死区时间(Dead Time):为了避免主通道和互补通道的开关在某一瞬间同时导通(造成短路),可以引入死区时间。死区时间是指主通道关闭后,互补通道延迟一定时间才开始导通,反之亦然。这是电机控制和开关电源中非常关键的一项保护功能。
互补输出控制电机正反转例子图:(H桥)
扩展:IGBT与MOSFET对比:

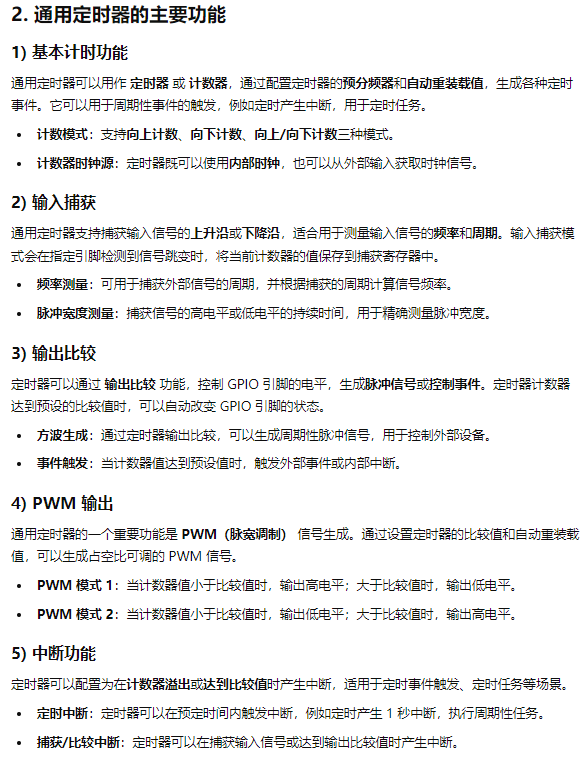
二、通用定时器
在 STM32F103C8T6 微控制器中,通用定时器提供了丰富的功能,适合于基本计时、输入捕获、输出比较、PWM 输出等多种应用。STM32F103C8T6 配备了多个通用定时器,包括 TIM2、TIM3、TIM4。
- TIM2:32 位通用定时器,支持基本定时、中断、捕获/比较、PWM 输出等功能。
- TIM3、TIM4:16 位通用定时器,支持类似功能,主要区别在于计数器的位宽较小。
应用实例:
1、定时器中断
使用定时器2(TIM2),每隔1秒产生一次中断,时钟频率为72MHZ
void TIM2_Init(void)
{
// 开启 TIM2 时钟
__HAL_RCC_TIM2_CLK_ENABLE();
TIM_HandleTypeDef TimHandle = {0};
TimHandle.Instance = TIM2;
// 预分频器配置,计数频率为 10 kHz
TimHandle.Init.Prescaler = 7200 - 1; // 72 MHz / 7200 = 10 kHz
// 自动重装载值,1 秒定时
TimHandle.Init.Period = 10000 - 1; // 10 kHz / 10000 = 1 秒
TimHandle.Init.CounterMode = TIM_COUNTERMODE_UP;
HAL_TIM_Base_Init(&TimHandle);
// 启用定时器中断
HAL_TIM_Base_Start_IT(&TimHandle);
}
// 定时器中断回调函数
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM2)
{
// 每 1 秒触发一次中断
HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_5); // 切换 GPIO 状态
}
}
代码中,TIM2 配置为每秒产生一次中断,计数频率为 10 kHz,周期为 1 秒。每次中断发生时,GPIO 引脚状态发生翻转。
定时器中断回调函数:用于处理定时器产生的中断事件。STM32 使用 HAL 库时,定时器中断发生后,HAL_TIM_PeriodElapsedCallback() 函数会被自动调用,这是一个通用的定时器中断回调函数,负责处理定时器的计时溢出或更新事件。
(参数 htim:传入的 TIM_HandleTypeDef 结构体用于标识是哪一个定时器产生了中断)
2、使用TIM3生成PWM信号
假设我们使用TIM3生成一个1KHZ的PWM信号,占空比50%
void TIM3_PWM_Init(void)
{
// 开启 TIM3 时钟
__HAL_RCC_TIM3_CLK_ENABLE();
TIM_HandleTypeDef TimHandle = {0};
TIM_OC_InitTypeDef sConfigOC = {0}; //输出比较的结构体,任务句柄
// 基本时基配置
TimHandle.Instance = TIM3;
TimHandle.Init.Prescaler = 72 - 1; // 预分频器,计数频率 1 MHz
TimHandle.Init.Period = 1000 - 1; // 自动重装载值,1 kHz PWM 频率
TimHandle.Init.CounterMode = TIM_COUNTERMODE_UP;
HAL_TIM_PWM_Init(&TimHandle); // 初始化 PWM
// 配置 PWM 输出通道
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 500; // 50% 占空比
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
HAL_TIM_PWM_ConfigChannel(&TimHandle, &sConfigOC, TIM_CHANNEL_1);
// 启动 PWM 输出
HAL_TIM_PWM_Start(&TimHandle, TIM_CHANNEL_1);
}
3、使用 TIM4 捕获输入信号
假设我们使用 TIM4 捕获输入信号的上升沿,并测量输入信号的频率。
void TIM4_InputCapture_Init(void)
{
// 开启 TIM4 时钟
__HAL_RCC_TIM4_CLK_ENABLE();
TIM_HandleTypeDef TimHandle = {0};
TIM_IC_InitTypeDef sConfigIC = {0};
// 基本时基配置
TimHandle.Instance = TIM4;
TimHandle.Init.Prescaler = 72 - 1; // 计数频率为 1 MHz
TimHandle.Init.Period = 0xFFFF; // 最大计数值
TimHandle.Init.CounterMode = TIM_COUNTERMODE_UP;
HAL_TIM_IC_Init(&TimHandle);
// 输入捕获配置
sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_RISING; //上升沿捕获
sConfigIC.ICSelection = TIM_ICSELECTION_DIRECTTI;
sConfigIC.ICPrescaler = TIM_ICPSC_DIV1;
sConfigIC.ICFilter = 0;
HAL_TIM_IC_ConfigChannel(&TimHandle, &sConfigIC, TIM_CHANNEL_1);
// 启动输入捕获
HAL_TIM_IC_Start_IT(&TimHandle, TIM_CHANNEL_1);
}
输入捕获,计算输入信号周期
#include "stm32f1xx_hal.h"
// 定义全局变量
uint32_t capture1 = 0;
uint32_t capture2 = 0;
uint32_t difference = 0;
uint32_t frequency = 0;
// 初始化 TIM3 的输入捕获功能
void TIM3_InputCapture_Init(void)
{
__HAL_RCC_TIM3_CLK_ENABLE();
TIM_HandleTypeDef TimHandle = {0};
TIM_IC_InitTypeDef sConfigIC = {0};
TimHandle.Instance = TIM3;
TimHandle.Init.Prescaler = 72 - 1; // 1 MHz 计数频率
TimHandle.Init.Period = 0xFFFF;
TimHandle.Init.CounterMode = TIM_COUNTERMODE_UP;
HAL_TIM_IC_Init(&TimHandle);
sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_RISING;
sConfigIC.ICSelection = TIM_ICSELECTION_DIRECTTI;
sConfigIC.ICPrescaler = TIM_ICPSC_DIV1;
sConfigIC.ICFilter = 0;
HAL_TIM_IC_ConfigChannel(&TimHandle, &sConfigIC, TIM_CHANNEL_1);
HAL_TIM_IC_Start_IT(&TimHandle, TIM_CHANNEL_1);
}
// 定时器输入捕获回调函数
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM3 && htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
{
if (capture1 == 0)
{
capture1 = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1);
}
else
{
capture2 = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1);
if (capture2 > capture1)
{
difference = capture2 - capture1;
}
else
{
difference = (0xFFFF - capture1) + capture2 + 1;
}
frequency = 1000000 / difference;
capture1 = 0;
}
}
}
void TIM3_NVIC_Config(void)
{
HAL_NVIC_SetPriority(TIM3_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(TIM3_IRQn);
}
// 主函数
int main(void)
{
HAL_Init();
TIM3_InputCapture_Init();
TIM3_NVIC_Config();
while(1)
{
// 可以在此处监控 frequency 变量
}
}
二、STM32F103C8T6-定时器的更多相关文章
- 【Visual C++】游戏编程学习笔记之二:定时器的使用
本系列文章由@二货梦想家张程所写,转载请注明出处. 本文章链接:http://blog.csdn.net/terence1212/article/details/44195831 作者:ZeeCode ...
- 从零开始学 Web 之 BOM(二)定时器
大家好,这里是「 从零开始学 Web 系列教程 」,并在下列地址同步更新...... github:https://github.com/Daotin/Web 微信公众号:Web前端之巅 博客园:ht ...
- STM32 定时器详细篇(基于HAL库)
l 16位的向上.向下.向上/向下(中心对齐)计数模式,支持自动重装载 l 16位的预分频器 l 每个定时器都有多个独立通道,每个通道可用于 * 输入捕获 * 输出比较 * PWM输出 * ...
- jmeter(七)定时器
知识来源有点复杂,其他测试工作者的博客,百度百科,搜集的电子文档,个人理解等等,限于水平和理解能力,可能有些内容有错误的地方... jmeter提供了很多元件,帮助我们更好的完成各种场景的性能测试,其 ...
- JavaScript定时器原理分析
.header { cursor: pointer } p { margin: 3px 6px } th { background: lightblue; width: 20% } table { t ...
- μC/OS-Ⅲ系统的时间管理函数和定时器
一.时间管理函数 μC/OS-Ⅲ系统提供一些列时间管理服务函数: 1.OSTimeDly():任务延时n个时钟节拍. 2.OSTimeDlyHMSM():任务延时指定的时间,采用“时:分:秒:毫秒”方 ...
- Cocos2d-x 3.2 学习笔记(十六)保卫萝卜 游戏主循环与定时器
保卫萝卜~想法一直存在于想法,实战才是硬道理!有想法就去实现,眼高手低都是空谈. 一.游戏主循环GameSchedule 主循环是游戏处理逻辑,控制游戏进度的地方,处理好主循环是很重要的 ...
- Unix_Linux系统定时器的应用(案例)
2014-05-05 Created By BaoXinjian
- cocos2dx中的定时器及其分类
cocos2dx中的定时器分三大类: 1.帧循环定时器 2.一次性定时器 3.自定义定时器 一.帧循环定时器,顾名思义,每一帧都会执行一次,用于实时性要求比较高的场合,如碰撞检测 void sched ...
- Stm32 定时器 定时时间设置及PWM频率 占空比的设置总结
一.定时器的时钟: 当SYSCLK等于72M,APB1等于36M APB2等于72M时,定时器的时钟为72M.注意图中这句话:如果APB1/APB2预分频器=1则频率不变,否则频率x2.如果此时,AP ...
随机推荐
- Maven 项目 有Dependencies, 使用时无法引用,爆红
1. 找到本地的该依赖的文件夹,将里面的.lastUpdated文件删除 2. IDEA清缓存重启
- 在stable diffussion中控制生成图片的光线
在摄影中,光线起着至关重要的作用,它对图像的整体质量和氛围有着显著的影响.您可以使用光线来增强主题,创造深度和维度,传达情感,以及突出重要细节. 在这篇文章中,我会告诉你如何在stable diffu ...
- mysql 存储结构介绍及执行过程分析
MySQL体系结构介绍 1 mysql 的体系结构 MySQL整体的逻辑结构可以分为4层,客户层.服务层.存储引擎层.数据层 客户层 客户层:进行相关的连接处理.权限控制.安全处理等操作 服务层 服务 ...
- 消息队列初见:一起聊聊引入系统mq 之后的问题
消息队列前文目录 消息队列初见:一起聊聊引入系统mq 之后的问题 https://www.cnblogs.com/yizhiamumu/p/16573472.html 分布式事务实战方案汇总 http ...
- CSS – border-radius (Rounded Corners)
前言 之前的文章 CSS – W3Schools 学习笔记 (3), 这篇独立出来写, 作为整理. 参考: Youtube – Advanced CSS Border-Radius Tutorial ...
- 实用技巧:根据menuconfig定位一个驱动涉及到的源文件
根据menuconfig定位一个驱动涉及到的源文件,这个是很常用的,因为有时候你需要参考别人的驱动代码.新手不知道如何定位驱动相关源码,这篇文章将告之. 假设我手头有一块开发板,现在我想要获取板载ov ...
- HuggingChat macOS 版现已发布
Hugging Face 的开源聊天应用程序 Hugging Chat,现已推出适用于 macOS 的版本. 主要特点 Hugging Chat macOS 版本具有以下亮点: 强大的模型支持: 用户 ...
- Windows远程设置''不可复制''的权限
起因: 有一个技术部门的同事需要远程其他同学的电脑进行操作,但是不允许他复制目标电脑上的文件,避免造成资料外泄 解决办法: 组策略编辑器中,设置 计算机配置 -> 管理模板 -> wind ...
- 掌握Docker:简化KES单机安装与管理的最佳实践
今天我们将继续深入探讨KES的单机安装,依然围绕Docker的使用展开.这一部分的内容将涵盖一些常见的陷阱以及在遇到问题时如何进行有效的反馈和解决.首先,我们需要找到官方的安装教程,确保以官方指南为主 ...
- CPU缓存伪共享
CPU缓存什么东西?当然这个问题很多人有可能觉得比较傻,CPU缓存什么,肯定是缓存数据(代码)啊,要不然还能缓存啥,这个确实没问题,但是CPU到底缓存什么样的数据呢?因为对CPU来说,无论是指令,还是 ...