移动物体监控系统-sprint2摄像头子系统开发
一、摄像头使能驱动
1.1 摄像头软件系统构架
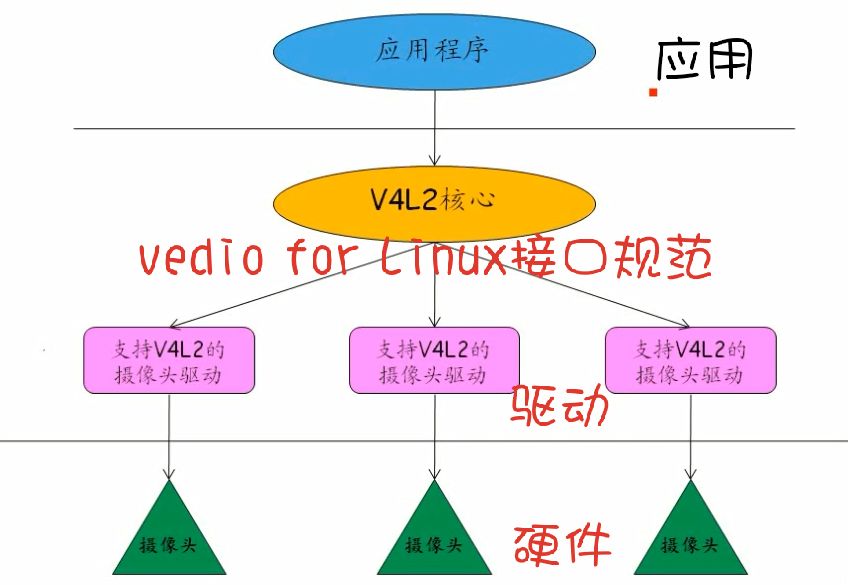
摄像头采集系统按照上图,硬件(摄像头)->摄像头驱动 ->V4L2接口规范 ->图像采集(应用)。V4L2将不同类型的摄像头设备按照统一的接口规范进行图像采集!!!
1.2 摄像头驱动的使能配置
(1)在linux-smart210目录下执行 "make menuconfig ARCH+arm"
(2)依次选择如下配置选项
Device Drivers --->
Multimedia support --->
[*]video for linux --->
[*]video capture adapters --->
[*]V2L usb devices ---> (支持V4L2接口)
<*>GSPCA based webcams --->(万能摄像头驱动)
<*>ZC3XX usb camers Drivers (具体usb摄像头对应的驱动程序)
(3)编译新内核(make uImage ARCH=arm CROSS _COMPILE=arm=linux),内核下载至开发板,摄像头开发环境搭建完成。
(4)摄像头测试程序 camers.c
编译" arm-linux-gcc camera.c -o camera ",将生成的应用程序拷贝到开发板,插入USB摄像头至开发板显示驱动连接信息,执行./camera,即可捕获采集的图像。
二、V4L2编程接口基础设计
part1:V4L2设计构架图
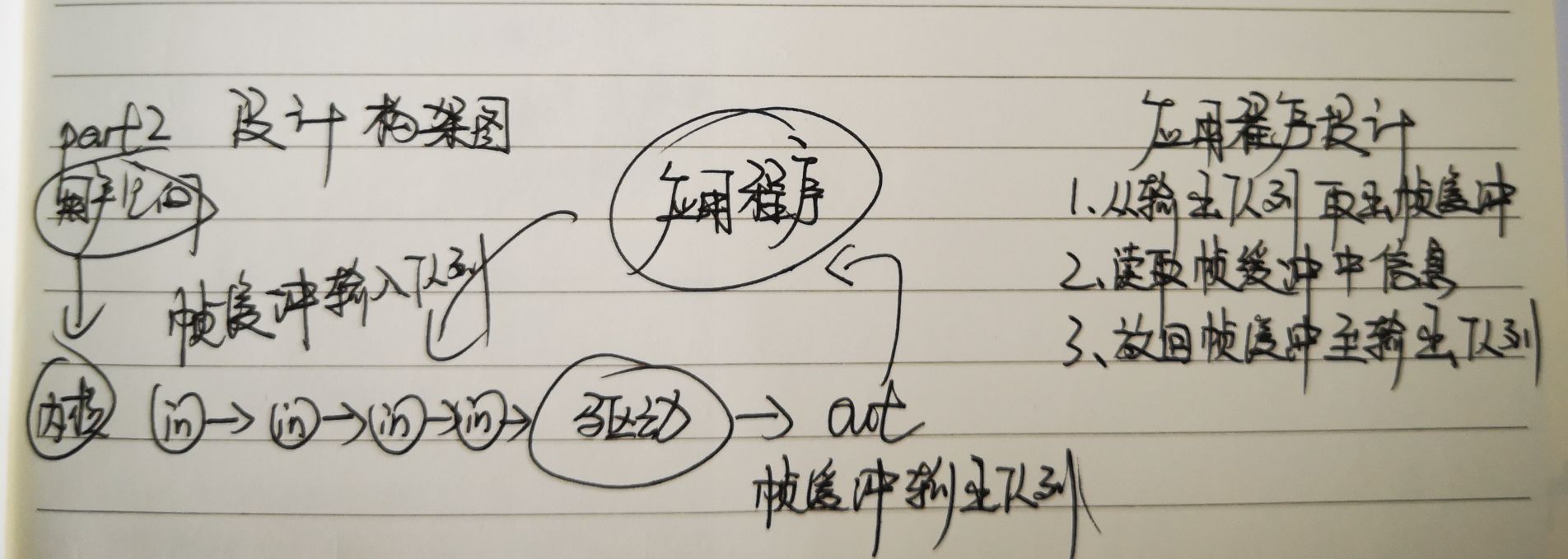
由上图,内核空间中帧缓冲中存储中着摄像头驱动采集的图像信息,用户空间的应用程序需要获取采集到的图像,则需要对帧缓冲进行一下处理:
取出帧缓冲(出队列) ->读取帧缓冲中的数据 -> 放回帧缓冲(入队)
part2:V4L2摄像头编程模型
1、打开摄像头设备文件 ("/dev/video0");
2、获取驱动信息 (ioctl_fd,VIDIOC_QIERYCAP,&cap)
3、设置图像格式 (VIDIOC_S_FMT)
4、申请帧缓冲 (VIDIOC_REQBUFS)
5、获取帧缓冲长度信息 (VIDIOC_QUERYBUF)
6、使用mmap把内核空间的帧缓冲映射到用户空间
7、帧缓冲入队列 (VIDIOC_QBUF)
8、开始采集图像 (VIDIOC_STREAMON)
9、取出帧缓冲(出队)(VIDIOC_DQBUF)
10、访问帧缓冲 (write/read)
11、帧缓冲重新入队 (VIDIOC_QBUF)
part3:V4L2编程
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <assert.h>
#include <getopt.h>
#include <fcntl.h>
#include <unistd.h>
#include <errno.h>
#include <malloc.h>
#include <sys/stat.h>
#include <sys/types.h>
#include <sys/time.h>
#include <sys/mman.h>
#include <sys/ioctl.h> #include <asm/types.h>
#include <linux/videodev2.h> struct buffer {
void * start;
size_t length;
}; struct buffer *buffers;
unsigned long n_buffers;
unsigned long file_length; int file_fd;
char *dev_name = "/dev/video3";
int fd; static int read_frame (void)
{
struct v4l2_buffer buf; /*帧出列*/
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; //V4L2_BUF_TYPE_VIDEO_CAPTURE:1
buf.memory = V4L2_MEMORY_MMAP;
ioctl (fd, VIDIOC_DQBUF, &buf); write(file_fd,buffers[buf.index].start,buffers[buf.index].length); /*buf入列*/
ioctl(fd, VIDIOC_QBUF, &buf); return ;
} int main (int argc,char ** argv)
{
struct v4l2_capability cap;
struct v4l2_format fmt;
struct v4l2_requestbuffers req;
struct v4l2_buffer buf;
unsigned int i;
enum v4l2_buf_type type; file_fd = open("test.jpg", O_RDWR | O_CREAT, );
//1.打开摄像头设备文件
fd = open (dev_name, O_RDWR | O_NONBLOCK, ); /*2.获取驱动信息*/
ioctl (fd, VIDIOC_QUERYCAP, &cap);
printf("Driver Name:%s\n Card Name:%s\n Bus info:%s\n\n",cap.driver,cap.card,cap.bus_info); /*3.设置图像格式*/
fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
fmt.fmt.pix.width = ;
fmt.fmt.pix.height = ;
fmt.fmt.pix.field = V4L2_FIELD_INTERLACED;
fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_MJPEG; ioctl (fd, VIDIOC_S_FMT, &fmt) ; /*4.申请图像缓冲区*/
req.count = ;
req.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
req.memory = V4L2_MEMORY_MMAP;
ioctl (fd, VIDIOC_REQBUFS, &req); buffers = calloc (req.count, sizeof (*buffers)); for (n_buffers = ; n_buffers < req.count; ++n_buffers)
{
/*4.1获取图像缓冲区的信息*/
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory = V4L2_MEMORY_MMAP;
buf.index = n_buffers; ioctl (fd, VIDIOC_QUERYBUF, &buf); buffers[n_buffers].length = buf.length; // 4.2把内核空间中的图像缓冲区映射到用户空间
buffers[n_buffers].start = mmap (NULL , //通过mmap建立映射关系
buf.length,
PROT_READ | PROT_WRITE ,
MAP_SHARED ,
fd,
buf.m.offset);
} /*4.3图像缓冲入队*/ for (i = ; i < n_buffers; ++i)
{
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory = V4L2_MEMORY_MMAP;
buf.index = i;
ioctl (fd, VIDIOC_QBUF, &buf); } //4.4开始捕捉图像数据
type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
ioctl (fd, VIDIOC_STREAMON, &type); fd_set fds; FD_ZERO (&fds);
FD_SET (fd, &fds); select(fd + , &fds, NULL, NULL, NULL); /*4.5读取一幅图像*/
read_frame(); for (i = ; i < n_buffers; ++i)
munmap (buffers[i].start, buffers[i].length); close (fd);
close (file_fd);
printf("Camera Done.\n"); return ;
}
移动物体监控系统-sprint2摄像头子系统开发的更多相关文章
- 阶段2-新手上路\项目-移动物体监控系统\Sprint2-摄像头子系统开发\第2节-V4L2图像编程接口深度学习
参考资料: http://www.cnblogs.com/emouse/archive/2013/03/04/2943243.htmlhttp://blog.csdn.net/eastmoon5021 ...
- 移动物体监控系统-sprint3移动监控主系统设计与开发
一.移动监控的原理 通过获取摄像头图像,比较前后每一帧的图像数据,从而实现移动物体监控.所有移动监控原理都是这样,只是图像帧的对比的算法不一样. 二.移动物体监控系统的实现 选择开源的移动监控软件mo ...
- 阶段2-新手上路\项目-移动物体监控系统\Sprint3-移动监控主系统设计与开发
移动图像监控系统 去找一些相关开源程序进行移植:百度搜索-linux 移动监控 motion是一套免费开源的移动图像监测程序 前面我们已经使用了很多开源软件,他们的使用方法都是大同小异的 1).先在当 ...
- 阶段2-新手上路\项目-移动物体监控系统\Sprint1-声音报警子系统开发\第1节-Sprint Backlog规划
根据之前的sprint1-声音报警子系统是相对比较大的一个需求,需要把它进一步细化,然后指定sprint Backlog product Backlog是整个产品的功能列表! sprint Backl ...
- 阶段2-新手上路\项目-移动物体监控系统\Sprint4-嵌入式web服务器开发\第3课-CGI程序开发
实现CGI程序显示一幅图片最核心的功能 把上一节课编写好的led.c程序拷贝过来,并重新命名为image.c 把led的某些部分删除,后如下 那么如何显示一幅图片呢,百度(搜索在html里面去插入图片 ...
- 基于视频压缩的实时监控系统-sprint2采集端图像采集子系统设计
(1).初始化:a.初始化摄像头:b.注册事件到epoll (2).开始采集--->触发事件处理系统 (3).保存图像(方便测试) a.初始化摄像头 //初始化摄像头 1.获取驱动信息 2.设置 ...
- 移动物体监控系统-sprint4嵌入式web服务器开发
一.BOA嵌入式服务器的移植 step1:下载BOA服务器并解压,进入boa下面的src目录,执行./configure生成必须的配置文件以及Makefile step2:修改Makefile文件 c ...
- 移动物体监控系统-sprint1声音报警子系统
一.声卡驱动开发 1.1 声卡驱动架构 ——OSS开放式音频系统,声卡驱动中传统的OSS构架在02年被收购后即不开源,并且OSS的混音效果不好,因为产生了ALSA ——AlSA Linux系统高级音频 ...
- 第5季-小试牛刀-项目开发\阶段2-新手上路\项目-移动物体监控系统\Sprint0-产品设计与规划
lesson1---产品功能展示 先完成准备阶段,准备阶段要做的事情: a.项目经理选择团队, b.根据项目用户需求以及同类型的实物,制定产品功能列表 c.根据功能的难易程度,制定迭代周期以及在每周期 ...
随机推荐
- Scala 面向对象(十一):特质(接口) 四
1 扩展类的特质 特质可以继承类,以用来拓展该类的一些功能 所有混入该特质的类,会自动成为那个特质所继承的超类的子类 如果混入该特质的类,已经继承了另一个类(A类),则要求A类是特质超类的子类,否则就 ...
- python 面向对象专题(三):继承
目录 Python面向对象03 /继承 1. 初识继承 2. 单继承 3. 多继承 4. 总结 1. 初识继承 概念:专业角度:如果B类继承A类,B类就称为子类,派生类,A类就称为父类,超类,基类 种 ...
- 基于animate.css动画库的全屏滚动小插件,适用于vue.js(移动端、pc)项目
功能简介 基于animate.css动画库的全屏滚动,适用于vue.js(移动端.pc)项目. 安装 npm install vue-animate-fullpage --save 使用 main.j ...
- T133316 57级返校测试重测-T4-字符串的修改
大致题意: 有一个A字符串和一个B字符串, 操作将A或A的一个后缀修改为B, 求最少的操作数. 有三个操作为: 删除: 删除掉 A 中的某一个字符. 添加: 将某一个字符添加到 A 中任意位置. 替换 ...
- 太实用了!自己动手写软件——我们的密码PJ器终于完成了
之前我们完成了密码破解工具的界面,今天我们来看看功能实现吧. 目录 编码 提交——功能实现 开始破解——功能实现 读取密码字典 选择协议并执行破解动作 POP3协议的破解函数 IMAP协议的破解函数 ...
- Spring当中循环依赖很少有人讲,今天一起来学习!
网上关于Spring循环依赖的博客太多了,有很多都分析的很深入,写的很用心,甚至还画了时序图.流程图帮助读者理解,我看了后,感觉自己是懂了,但是闭上眼睛,总觉得还没有完全理解,总觉得还有一两个坎过不去 ...
- 带你快速了解 MongoDB 分布式集群
在分布式应用系统中,mongodb 已经成为 NoSQL 经典数据库.要想很好的使用 mongodb,仅仅知道如何使用它是不够的.只有对其架构原理等有了充分认识,才能在实际运用中使其更好地服务于应用, ...
- Android Studio常见问题集锦
Android studio无法在可视化页面预览XML布局文件 修改res/values/styles.xml文件中name=“AppTheme”的style,在Theme.AppCompat.Lig ...
- 3分钟看懂Python后端必须知道的Django的信号机制!
概念 django自带一套信号机制来帮助我们在框架的不同位置之间传递信息.也就是说,当某一事件发生时,信号系统可以允许一个或多个发送者(senders)将通知或信号(signals)发送给一组接受者( ...
- 今天完成了deviceman的程序,压缩成deivceman.rar
目录在d:\android_projects\deviceman 压成了deviceman.rar 发送到了yzx3233@sina.com